1.本实用新型属于带电作业机器人技术领域,尤其涉及一种夹爪的带电作业机器人。
背景技术:
2.目前,架空高压输电线路的工作环境比较恶劣,由于常年暴露在野外,非常容易受到环境和地理因素的影响,为保证输电线路的正常运行,需要定期或不定期对线路做一些维护工作,如带电巡检、异物清除、断股修复等,目前这些工作的主要是由人工在地电位或等电位带电作业,但是受到带电作业距离的限制,作业人员的操作范围也受到很大的制约,尤其是带电作业位置处于档段中间不靠近杆塔位置时,作业难度更是成倍增加;而且等电位带电作业需要得到调度部门的批准才能进行,线路中出现的问题往往不能得到及时的排除。
3.但是现有的带电作业机器人还存在着不具备防掉落功能,不便于移动和不便于搬运的问题。
4.因此,发明一种夹爪的带电作业机器人显得非常必要。
技术实现要素:
5.为了解决上述技术问题,本实用新型提供一种夹爪的带电作业机器人,以解决现有的带电作业机器人存在着不具备防掉落功能,不便于移动和不便于搬运的问题。一种夹爪的带电作业机器人,包括箱门,防护箱,控制箱,凹槽,转轴,把手,磁铁片,机械臂,夹爪,防掉落支撑架结构和可拆卸移动轮结构,所述的箱门铰链连接在防护箱的左侧;所述的控制箱螺栓连接在防护箱的内部;所述的凹槽开设在防护箱的前后两侧中间部位,并且凹槽的内部左右两侧的上部均轴承连接有转轴;所述的把手设置在凹槽的内部,并且把手轴承连接在两个所述的转轴之间;所述的磁铁片螺钉连接在凹槽的内部后侧的中下部;所述的机械臂的左端螺栓连接在防护箱的右侧中部;所述的夹爪螺栓连接在机械臂的右端;所述的防掉落支撑架结构连接防护箱;所述的可拆卸移动轮结构连接防护箱;所述的防掉落支撑架结构包括电推杆,工字型架,半环形卡箍,紧固螺栓,固定片和螺栓螺母,所述的电推杆的输出杆上端螺栓连接在工字型架的下侧中部;两个所述的半环形卡箍的下部一体化设置的连接杆分别插接在工字型架的内部左右两侧,并且通过紧固螺栓紧固连接设置;两个所述的固定片分别下端螺栓连接在两个所述的半环形卡箍的上部,并且两个所述的固定片通过螺栓螺母连接。
6.优选的,所述的可拆卸移动轮结构包括支撑架,电机,下工字轮,插杆,套管,调节螺栓,支撑板和上工字轮,所述的电机螺栓连接在支撑架的前侧上部,电机的输出轴贯穿支撑架的前侧上部,并且电机的输出轴后端键连接有下工字轮;所述的插杆的下端螺栓连接在支撑架的上侧中部,插杆的上端插接在套管的内部,并且插杆和套管通过调节螺栓紧固连接设置;所述的支撑板的下部螺栓连接在套管的上端;所述的上工字轮轴接在支撑板的
后侧。
7.优选的,所述的电推杆的下端螺栓连接在防护箱的上部左侧。
8.优选的,所述的支撑架的下端螺栓连接在防护箱的上部右侧。
9.优选的,所述的半环形卡箍设置有两个,并且两个所述的半环形卡箍相对设置。
10.优选的,所述的把手与磁铁片吸附设置。
11.优选的,所述的把手采用外壁喷涂有酚醛型防锈漆层的铁把手。
12.优选的,所述的半环形卡箍采用内壁喷涂有聚四氟乙烯层的铝合金卡箍。
13.与现有技术相比,本实用新型的有益效果为:
14.1.本实用新型中,所述的电推杆,工字型架,半环形卡箍,紧固螺栓,固定片和螺栓螺母的设置,有利于实现防掉落功能。
15.2.本实用新型中,所述的支撑架,电机,下工字轮,插杆,套管,调节螺栓,支撑板和上工字轮的设置,有利于带电作业机器人沿线缆移动。
16.3.本实用新型中,所述的凹槽,转轴,把手和磁铁片的设置,有利于搬运带电作业机器人。
17.4.本实用新型中,所述的箱门和防护箱的设置,有利于检修和维护控制箱。
18.5.本实用新型中,所述的控制箱的设置,有利于控制机械臂和夹爪。
19.6.本实用新型中,所述的机械臂的设置,有利于移动夹爪。
附图说明
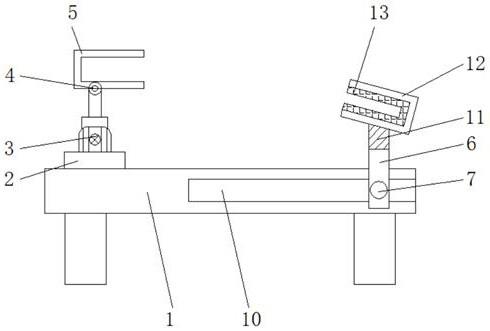
20.图1是本实用新型的结构示意图。
21.图2是本实用新型的防掉落支撑架结构的左视图。
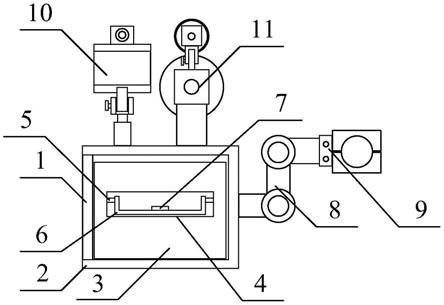
22.图3是本实用新型的可拆卸移动轮结构的结构示意图。
23.图中:
24.1、箱门;2、防护箱;3、控制箱;4、凹槽;5、转轴;6、把手;7、磁铁片;8、机械臂;9、夹爪;10、防掉落支撑架结构;101、电推杆;102、工字型架;103、半环形卡箍;104、紧固螺栓;105、固定片;106、螺栓螺母;11、可拆卸移动轮结构;111、支撑架;112、电机;113、下工字轮;114、插杆;115、套管;116、调节螺栓;117、支撑板;118、上工字轮。
具体实施方式
25.下面结合附图对本实用新型进行具体描述,如附图1和附图2所示,一种夹爪的带电作业机器人,包括箱门1,防护箱2,控制箱3,凹槽4,转轴5,把手6,磁铁片7,机械臂8,夹爪9,防掉落支撑架结构10和可拆卸移动轮结构11,所述的箱门1铰链连接在防护箱2的左侧;所述的控制箱3螺栓连接在防护箱2的内部;所述的凹槽4开设在防护箱2的前后两侧中间部位,并且凹槽4的内部左右两侧的上部均轴承连接有转轴5;所述的把手6设置在凹槽4的内部,并且把手6轴承连接在两个所述的转轴5之间;所述的磁铁片7螺钉连接在凹槽4的内部后侧的中下部;所述的机械臂8的左端螺栓连接在防护箱2的右侧中部;所述的夹爪9螺栓连接在机械臂8的右端;所述的防掉落支撑架结构10连接防护箱2;所述的可拆卸移动轮结构11连接防护箱2;所述的防掉落支撑架结构10包括电推杆101,工字型架102,半环形卡箍103,紧固螺栓104,固定片105和螺栓螺母106,所述的电推杆101的输出杆上端螺栓连接在
工字型架102的下侧中部;两个所述的半环形卡箍103的下部一体化设置的连接杆分别插接在工字型架102的内部左右两侧,并且通过紧固螺栓104紧固连接设置;两个所述的固定片105分别下端螺栓连接在两个所述的半环形卡箍103的上部,并且两个所述的固定片105通过螺栓螺母106连接;操作人员将螺栓螺母106拧下,并放松紧固螺栓104,将两个半环形卡箍103向左右两侧打开,然后将线缆放入两个半环形卡箍103之间,合上两个半环形卡箍103,并将紧固螺栓104和螺栓螺母106拧紧,从而将两个半环形卡箍103套在线缆外壁,防止机器人意外掉落的情况。
26.本实施方案中,结合附图3所示,所述的可拆卸移动轮结构11包括支撑架111,电机112,下工字轮113,插杆114,套管115,调节螺栓116,支撑板117和上工字轮118,所述的电机112螺栓连接在支撑架111的前侧上部,电机112的输出轴贯穿支撑架111的前侧上部,并且电机112的输出轴后端键连接有下工字轮113;所述的插杆114的下端螺栓连接在支撑架111的上侧中部,插杆114的上端插接在套管115的内部,并且插杆114和套管115通过调节螺栓116紧固连接设置;所述的支撑板117的下部螺栓连接在套管115的上端;所述的上工字轮118轴接在支撑板117的后侧;操作人员放松调节螺栓116,将套管115沿插杆114上下移动,使得线缆位于上工字轮118与下工字轮113之间,并且上工字轮118和下工字轮113将线缆夹紧,调整好后拧紧调节螺栓116,从而使得机器人适用于不同粗细的线缆,通过控制箱3控制电机112转动,电机112带动下工字轮113转动,从而使得机器人沿线缆移动。
27.本实施方案中,具体的,所述的电推杆101的下端螺栓连接在防护箱2的上部左侧。
28.本实施方案中,具体的,所述的支撑架111的下端螺栓连接在防护箱2的上部右侧。
29.本实施方案中,具体的,所述的半环形卡箍103设置有两个,并且两个所述的半环形卡箍103相对设置。
30.本实施方案中,具体的,所述的把手6与磁铁片7吸附设置。
31.本实施方案中,具体的,所述的把手6采用外壁喷涂有酚醛型防锈漆层的铁把手。
32.本实施方案中,具体的,所述的半环形卡箍103采用内壁喷涂有聚四氟乙烯层的铝合金卡箍。
33.本实施方案中,具体的,所述的上工字轮118采用外壁螺钉连接有环形毛刷层的工字型橡胶轮。
34.本实施方案中,具体的,所述的电机112采用25ga370型减速电机;所述的电推杆101采用xtl型电动推杆。
35.本实施方案中,具体的,所述的工字型架102采用工字型铝合金架;所述的固定片105采用长方形不锈钢片。
36.本实施方案中,具体的,所述的支撑架111采用不锈钢架;所述的下工字轮113采用工字型橡胶轮;所述的支撑板117采用长方形不锈钢板。
37.本实施方案中,具体的,所述的防护箱2采用外壁喷涂有环氧树脂漆层的铝合金箱。
38.本实施方案中,具体的,所述的电机112,电推杆101,机械臂8和夹爪9均与控制箱3内部设置的fx2n
‑
48型plc电性连接。
39.工作原理
40.本实用新型中,操作人员通过打开箱门1,便于对控制箱3进行检修和维护,需要搬
运机器人时,操作人员将把手6通过转轴5从凹槽4内转出,从而便捷地搬运机器人,机器人正常工作时,将把手6放入凹槽4内,把手6被磁铁片7吸附,防止把手6晃动影响机器人正常工作的情况;操作人员将螺栓螺母106拧下,并放松紧固螺栓104,将两个半环形卡箍103向左右两侧打开,然后将线缆放入两个半环形卡箍103之间,合上两个半环形卡箍103,并将紧固螺栓104和螺栓螺母106拧紧,从而将两个半环形卡箍103套在线缆外壁,防止机器人意外掉落的情况;操作人员放松调节螺栓116,将套管115沿插杆114上下移动,使得线缆位于上工字轮118与下工字轮113之间,并且上工字轮118和下工字轮113将线缆夹紧,调整好后拧紧调节螺栓116,从而使得机器人适用于不同粗细的线缆,通过控制箱3控制电机112转动,电机112带动下工字轮113转动,从而使得机器人沿线缆移动;操作人员通过控制箱3控制机械臂8和夹爪9,夹爪9将线缆进行夹持,便于操作人员带电作业。
41.利用本实用新型所述的技术方案,或本领域的技术人员在本实用新型技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。