技术特征:
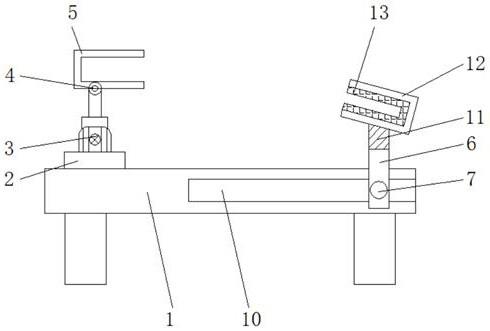
1.一种夹爪的带电作业机器人,其特征在于,该夹爪的带电作业机器人包括箱门(1),防护箱(2),控制箱(3),凹槽(4),转轴(5),把手(6),磁铁片(7),机械臂(8),夹爪(9),防掉落支撑架结构(10)和可拆卸移动轮结构(11),所述的箱门(1)铰链连接在防护箱(2)的左侧;所述的控制箱(3)螺栓连接在防护箱(2)的内部;所述的凹槽(4)开设在防护箱(2)的前后两侧中间部位,并且凹槽(4)的内部左右两侧的上部均轴承连接有转轴(5);所述的把手(6)设置在凹槽(4)的内部,并且把手(6)轴承连接在两个所述的转轴(5)之间;所述的磁铁片(7)螺钉连接在凹槽(4)的内部后侧的中下部;所述的机械臂(8)的左端螺栓连接在防护箱(2)的右侧中部;所述的夹爪(9)螺栓连接在机械臂(8)的右端;所述的防掉落支撑架结构(10)连接防护箱(2);所述的可拆卸移动轮结构(11)连接防护箱(2);所述的防掉落支撑架结构(10)包括电推杆(101),工字型架(102),半环形卡箍(103),紧固螺栓(104),固定片(105)和螺栓螺母(106),所述的电推杆(101)的输出杆上端螺栓连接在工字型架(102)的下侧中部;两个所述的半环形卡箍(103)的下部一体化设置的连接杆分别插接在工字型架(102)的内部左右两侧,并且通过紧固螺栓(104)紧固连接设置;两个所述的固定片(105)分别下端螺栓连接在两个所述的半环形卡箍(103)的上部,并且两个所述的固定片(105)通过螺栓螺母(106)连接。2.如权利要求1所述的夹爪的带电作业机器人,其特征在于,所述的可拆卸移动轮结构(11)包括支撑架(111),电机(112),下工字轮(113),插杆(114),套管(115),调节螺栓(116),支撑板(117)和上工字轮(118),所述的电机(112)螺栓连接在支撑架(111)的前侧上部,电机(112)的输出轴贯穿支撑架(111)的前侧上部,并且电机(112)的输出轴后端键连接有下工字轮(113);所述的插杆(114)的下端螺栓连接在支撑架(111)的上侧中部,插杆(114)的上端插接在套管(115)的内部,并且插杆(114)和套管(115)通过调节螺栓(116)紧固连接设置;所述的支撑板(117)的下部螺栓连接在套管(115)的上端;所述的上工字轮(118)轴接在支撑板(117)的后侧。3.如权利要求1所述的夹爪的带电作业机器人,其特征在于,所述的电推杆(101)的下端螺栓连接在防护箱(2)的上部左侧。4.如权利要求2所述的夹爪的带电作业机器人,其特征在于,所述的支撑架(111)的下端螺栓连接在防护箱(2)的上部右侧。5.如权利要求1所述的夹爪的带电作业机器人,其特征在于,所述的半环形卡箍(103)设置有两个,并且两个所述的半环形卡箍(103)相对设置。6.如权利要求1所述的夹爪的带电作业机器人,其特征在于,所述的把手(6)与磁铁片(7)吸附设置。7.如权利要求1所述的夹爪的带电作业机器人,其特征在于,所述的把手(6)采用外壁喷涂有酚醛型防锈漆层的铁把手。8.如权利要求1所述的夹爪的带电作业机器人,其特征在于,所述的半环形卡箍(103)采用内壁喷涂有聚四氟乙烯层的铝合金卡箍。
技术总结
本实用新型提供一种夹爪的带电作业机器人,包括箱门,防护箱,控制箱,凹槽,转轴,把手,磁铁片,机械臂,夹爪,防掉落支撑架结构和可拆卸移动轮结构,所述的箱门铰链连接在防护箱的左侧;所述的控制箱螺栓连接在防护箱的内部;所述的凹槽开设在防护箱的前后两侧中间部位,并且凹槽的内部左右两侧的上部均轴承连接有转轴;所述的把手设置在凹槽的内部,并且把手轴承连接在两个所述的转轴之间。本实用新型电推杆,工字型架,半环形卡箍,紧固螺栓,固定片和螺栓螺母的设置,有利于实现防掉落功能;支撑架,电机,下工字轮,插杆,套管,调节螺栓,支撑板和上工字轮的设置,有利于带电作业机器人沿线缆移动。沿线缆移动。沿线缆移动。
技术研发人员:龚玥
受保护的技术使用者:天津中晟达科技有限公司
技术研发日:2021.03.15
技术公布日:2021/11/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。