技术特征:
1.一种深度相机组件(dca),包括:传感器,所述传感器包括被配置为捕获局部区域的图像的多个像素,所述多个像素包括一组像素;彼此耦合的多个计数器,其中所述多个计数器中的每一个耦合到所述一组像素中的对应像素;和控制器,所述控制器被配置为:在图像帧的第一部分期间,估计与由所述一组像素中的每个像素收集的光相关联的原始深度值;和在所述图像帧的第二部分期间,对所述一组像素中的第一像素执行强度测量,其中所述强度测量部分地基于在所述图像帧的第二部分期间从所述多个计数器接收的信息。2.根据权利要求1所述的深度相机组件,其中所述控制器还被配置成使用所述强度测量来校准所述图像帧的原始深度值。3.根据权利要求1所述的深度相机组件,其中所述控制器还被配置为在所述图像帧的第二部分期间,对所述一组像素中的第二像素执行强度测量,其中所述第二像素的强度测量部分地基于在所述图像帧的第二部分期间从所述多个计数器接收的信息。4.根据权利要求1所述的深度相机组件,其中所述传感器包括多个时间数字转换器,其中所述多个时间数字转换器中的每一个耦合到所述一组像素中的相应像素。5.根据权利要求4所述的深度相机组件,其中,所述控制器还被配置成在所述图像帧的第三部分期间校准所述时间数字转换器中的一个或更多个。6.根据权利要求1所述的深度相机组件,其中所述原始深度值包括飞行时间测量值。7.根据权利要求1所述的深度相机组件,其中:在所述图像帧的第一部分期间,多路复用器被配置成选择耦合到振荡器的多路复用器输入端;和在所述图像帧的第二部分期间,所述多路复用器被配置成选择耦合到所述第一像素的多路复用器输入端。8.一种方法,其包括:在包括传感器的深度相机组件的图像帧的第一部分期间,估计与由所述传感器上的一组像素中的每个像素收集的光相关联的原始深度值;和在所述图像帧的第二部分期间,对所述一组像素中的第一像素执行强度测量,其中所述强度测量部分地基于在所述图像帧的第二部分期间从多个计数器接收的信息,其中所述多个计数器中的每一个耦合到所述一组像素中的对应像素。9.根据权利要求8所述的方法,还包括使用所述强度测量来校准所述图像帧的原始深度值。10.根据权利要求8所述的方法,还包括在所述图像帧的第二部分期间,对所述一组像素中的第二像素执行强度测量,其中所述第二像素的强度测量部分地基于在所述图像帧的第二部分期间从所述多个计数器接收的信息。11.根据权利要求8所述的方法,其中所述传感器包括多个时间数字转换器,其中所述多个时间数字转换器中的每一个耦合到所述一组像素中的相应像素。12.根据权利要求11所述的方法,还包括在所述图像帧的第三部分期间,校准所述时间
数字转换器中的一个或更多个。13.根据权利要求8所述的方法,其中所述原始深度值包括飞行时间测量值。14.根据权利要求8所述的方法,还包括:在所述图像帧的第一部分期间,由多路复用器选择耦合到振荡器的多路复用器输入端;和在所述图像帧的第二部分期间,由所述多路复用器选择耦合到所述第一像素的多路复用器输入端。15.一种深度相机组件(dca),包括:第一像素;耦合到所述第一像素的第一时间数字转换器,所述第一时间数字转换器包括第一振荡器和第一计数器;第一多路复用器,所述第一多路复用器包括:耦合到所述第一像素的多路复用器输入端;耦合到所述第一振荡器的多路复用器输入端;和耦合到所述第一计数器的多路复用器输出端;第二像素;耦合到所述第二像素的第二时间数字转换器,所述第二时间数字转换器包括第二振荡器和第二计数器;和第二多路复用器,所述第二多路复用器包括:耦合到所述第二像素的多路复用器输入端;耦合到所述第二振荡器的多路复用器输入端;耦合到所述第一计数器的多路复用器输入端;和耦合到所述第二计数器的多路复用器输出端。16.根据权利要求15所述的深度相机组件,还包括控制器,所述控制器被配置成:在图像帧的第一部分期间,估计与由包括所述第一像素和所述第二像素的一组像素中的每个像素收集的光相关联的原始深度值;和在所述图像帧的第二部分期间,对所述第一像素执行强度测量,其中所述强度测量部分地基于在所述图像帧的第二部分期间从所述第一计数器和所述第二计数器接收的信息。17.根据权利要求15所述的深度相机组件,其中:在图像帧的飞行时间部分期间,所述第一多路复用器被配置为选择耦合到所述第一振荡器的多路复用器输入端,并且所述第二多路复用器被配置为选择耦合到所述第二振荡器的多路复用器输入端;和在所述图像帧的第一强度部分期间,所述第一多路复用器被配置为选择耦合到所述第一像素的多路复用器输入端,并且所述第二多路复用器被配置为选择耦合到所述第一计数器的多路复用器输入端。18.根据权利要求17所述的深度相机组件,其中,在所述图像帧的第二强度部分期间,所述第一多路复用器被配置为选择耦合到所述第二计数器的多路复用器输入端,并且所述第二多路复用器被配置为选择耦合到所述第二像素的多路复用器输入端。19.根据权利要求15所述的深度相机组件,还包括时钟,所述时钟被配置为在图像帧的
飞行时间校准部分期间,在已知时间向所述第一振荡器和所述第二振荡器提供起始信号和停止信号。20.根据权利要求19所述的深度相机组件,其中,在所述图像帧的飞行时间校准部分期间,所述第一多路复用器被配置为选择耦合到所述第一振荡器的多路复用器输入端,并且所述第二多路复用器被配置为选择耦合到所述第二振荡器的多路复用器输入端。
技术总结
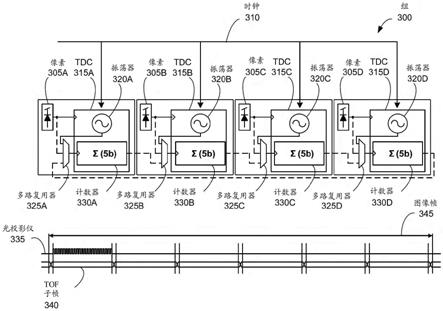
本申请涉及用于深度传感的时间数字转换器。深度相机组件用于获得描述局部区域的深度信息。深度相机组件包括具有多个像素的传感器。一些或所有像素被分成耦合到各自的多用途时间数字转换器的组。每个多用途时间数字转换器包括振荡器和计数器。组中的每个像素与多路复用器相关联,该多路复用器被配置为在耦合到该像素、振荡器或与不同像素相关联的计数器的输入端之间进行选择。多路复用器将信号输出到与像素相关联的时间数字转换器的计数器。在图像帧的第一部分期间进行飞行时间测量。在图像帧的第二部分期间,传感器可以用作强度计数器。在图像帧的第三部分期间,可以校准深度传感器。感器。感器。
技术研发人员:迈克尔
受保护的技术使用者:脸谱科技有限责任公司
技术研发日:2021.04.27
技术公布日:2021/11/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。