1.本发明涉及农业技术领域,特别是涉及一种除草方法及系统。
背景技术:
2.杂草是造成农作物区减产的重要因素,常规的除草系统有人工除草和药剂除草。人工除草劳动强度大,人工成本高,且需杂草长到可以手工拔除的程度,这种方式会消耗土壤肥力;药剂除草主要是通过喷施各种除草剂的方式,相对来说省时省力,但是,药剂的使用往往是人工选择几种生物量较大的杂草用药,对农作物种植区域进行全区域喷射,药剂使用量大,造成药剂浪费和环境污染。
技术实现要素:
3.本发明的目的是提供一种除草方法及系统,能够确定喷射药剂的种类及剂量,针对杂草分布对农作物区进行局部药剂喷射,在不影响除草效果的同时减少了药剂的使用量。
4.为实现上述目的,本发明提供了如下方案:
5.一种除草方法,包括:
6.获取农作物区中各植株的图像及位置;
7.分别将所述农作物区中各植株的图像与农作物标准图像进行比对,确定出所述农作物区中的非农作物植株;
8.将所述非农作物植株的图像分别与多种杂草标准图像进行比对,确定出所述农作物区中的杂草种类及每种杂草的数量;
9.根据所述农作物区中的杂草种类,以及每种杂草的数量和位置,确定喷射药剂的种类和剂量,以及每种喷射药剂的喷射路径。
10.可选的,所述分别将所述农作物区中各植株的图像与农作物标准图像进行比对,确定出所述农作物区中的非农作物植株,具体包括:
11.确定所述农作物区中任一植株为当前植株;
12.对当前植株的图像进行移动处理、等比例缩放处理和旋转处理,得到当前植株的多张图像;
13.分别将当前植株的多张图像与农作物标准图像进行比对,确定所述当前植株的多张图像中与所述农作物标准图像的重合率最大的图像对应的重合率为当前植株与农作物的第一重合率;
14.判断所述第一重合率是否小于重合率阈值,得到第一判断结果;
15.若第一判断结果为是,则确定所述当前植株为非农作物植株;
16.若第一判断结果为否,则确定所述当前植株为农作物植株。
17.可选的,所述将所述非农作物植株的图像分别与多种杂草标准图像进行比对,确定出所述农作物区中的杂草种类及每种杂草的数量,具体包括:
18.确定任一非农作物植株为当前非农作物植株;
19.对当前非农作物植株的图像进行移动处理、等比例缩放处理和旋转处理,得到当前非农作物植株的多张图像;
20.确定任一种杂草标准图像为当前杂草标准图像;
21.分别将当前非农作物植株的多张图像与所述当前杂草标准图像进行比对,确定所述当前非农作物植株的多张图像中与所述当前杂草标准图像的重合率最大的图像对应的重合率为当前非农作物植株与当前杂草的第二重合率;
22.更新所述当前杂草标准图像并返回步骤“分别将当前非农作物植株的多张图像与所述当前杂草标准图像进行比对,确定所述当前非农作物植株的多张图像中与所述当前杂草标准图像的重合率最大的图像对应的重合率为当前植株与当前杂草的第二重合率”,直至遍历所有杂草标准图像,得到当前非农作物植株与每种杂草的第二重合率;
23.确定多个第二重合率中的最大第二重合率,并判断所述最大第二重合率是否小于所述重合率阈值,得到第二判断结果;
24.若所述第二判断结果为否,则确定所述最大第二重合率对应杂草标准图像的杂草种类为所述当前非农作物植株的杂草种类;
25.若所述第二判断结果为是,则更新数据库;所述数据库用于存储所述农作物标准图像、多种所述杂草标准图像,以及每种杂草对应的药剂种类。
26.可选的,所述根据所述农作物区中的杂草种类,以及每种杂草的数量和位置,确定喷射药剂的种类和剂量,以及每种喷射药剂的喷射路径,具体包括:
27.确定所述农作物区中任一种杂草为当前杂草;
28.判断所述当前杂草的数量是否达到数量阈值,得到第三判断结果;
29.若所述第三判断结果为是,则根据所述当前杂草的种类确定喷射药剂的种类,并根据所述当前杂草的位置和载体的喷射半径,确定所述载体的多个悬停点;
30.根据每株杂草所需喷射药剂的剂量、每个所述悬停点中的杂草数量,以及所述悬停点的数量,确定所述喷射药剂的喷射总剂量;
31.根据多个所述悬停点,以路径最短为原则确定出所述载体搭载所述喷射药剂喷射当前杂草的最优途径;
32.所述载体搭载喷射总剂量的喷射药剂,按照所述最优途径进行药剂喷射。
33.一种除草系统,包括:
34.图像及位置获取模块,用于获取农作物区中各植株的图像及位置;
35.非农作物植株确定模块,用于分别将所述农作物区中各植株的图像与农作物标准图像进行比对,确定出所述农作物区中的非农作物植株;
36.杂草种类及数量确定模块,用于将所述非农作物植株的图像分别与多种杂草标准图像进行比对,确定出所述农作物区中的杂草种类及每种杂草的数量;
37.喷射路径确定模块,用于根据所述农作物区中的杂草种类,以及每种杂草的数量和位置,确定喷射药剂的种类和剂量,以及每种喷射药剂的喷射路径。
38.可选的,所述非农作物植株确定模块,具体包括:
39.当前植株确定单元,用于确定所述农作物区中任一植株为当前植株;
40.第一图像处理单元,用于对当前植株的图像进行移动处理、等比例缩放处理和旋
转处理,得到当前植株的多张图像;
41.第一重合率确定单元,用于分别将当前植株的多张图像与农作物标准图像进行比对,确定所述当前植株的多张图像中与所述农作物标准图像的重合率最大的图像对应的重合率为当前植株与农作物的第一重合率;
42.第一判断单元,用于判断所述第一重合率是否小于重合率阈值,得到第一判断结果;若第一判断结果为是,则调用非农作物植株确定单元;若第一判断结果为否,则调用农作物植株确定单元;
43.非农作物植株确定单元,用于确定所述当前植株为非农作物植株;
44.农作物植株确定单元,用于确定所述当前植株为农作物植株。
45.可选的,所述杂草种类及数量确定模块,具体包括:
46.当前非农作物植株确定单元,用于确定任一非农作物植株为当前非农作物植株;
47.第二图像处理单元,用于对当前非农作物植株的图像进行移动处理、等比例缩放处理和旋转处理,得到当前非农作物植株的多张图像;
48.当前杂草标准图像确定单元,用于确定任一种杂草标准图像为当前杂草标准图像;
49.第二重合率确定单元,用于分别将当前非农作物植株的多张图像与所述当前杂草标准图像进行比对,确定所述当前非农作物植株的多张图像中与所述当前杂草标准图像的重合率最大的图像对应的重合率为当前非农作物植株与当前杂草的第二重合率;
50.当前杂草标准图像更新单元,用于更新所述当前杂草标准图像并返回步骤“分别将当前非农作物植株的多张图像与所述当前杂草标准图像进行比对,确定所述当前非农作物植株的多张图像中与所述当前杂草标准图像的重合率最大的图像对应的重合率为当前植株与当前杂草的第二重合率”,直至遍历所有杂草标准图像,得到当前非农作物植株与每种杂草的第二重合率;
51.第二判断单元,用于确定多个第二重合率中的最大第二重合率,并判断所述最大第二重合率是否小于所述重合率阈值,得到第二判断结果;若所述第二判断结果为否,则调用当前非农作物植株杂草种类确定单元;若所述第二判断结果为是,则调用数据库更新单元;
52.当前非农作物植株杂草种类确定单元,用于确定所述最大第二重合率对应杂草标准图像的杂草种类为所述当前非农作物植株的杂草种类;
53.数据库更新单元,用于更新数据库;所述数据库用于存储所述农作物标准图像、多种所述杂草标准图像,以及每种杂草对应的药剂种类。
54.可选的,所述喷射路径确定模块,具体包括:
55.当前杂草确定单元,用于确定所述农作物区中任一种杂草为当前杂草;
56.第三判断单元,用于判断所述当前杂草的数量是否达到数量阈值,得到第三判断结果;若所述第三判断结果为是,则调用悬停点确定单元;
57.悬停点确定单元,用于根据所述当前杂草的种类确定喷射药剂的种类,并根据所述当前杂草的位置和载体的喷射半径,确定所述载体的多个悬停点;
58.喷射总剂量确定单元,用于根据每株杂草所需喷射药剂的剂量、每个所述悬停点中的杂草数量,以及所述悬停点的数量,确定所述喷射药剂的喷射总剂量;
59.最优途径确定单元,用于根据多个所述悬停点,以路径最短为原则确定出所述载体搭载所述喷射药剂喷射当前杂草的最优途径;
60.药剂喷射单元,用于控制所述载体搭载喷射总剂量的喷射药剂,按照所述最优途径进行药剂喷射。
61.根据本发明提供的具体实施例,本发明公开了以下技术效果:
62.本发明提供了一种除草方法及系统,方法包括:获取农作物区中各植株的图像及位置;分别将农作物区中各植株的图像与农作物标准图像进行比对,确定出农作物区中的非农作物植株;将非农作物植株的图像分别与多种杂草标准图像进行比对,确定出农作物区中的杂草种类及每种杂草的数量;根据农作物区中的杂草种类,以及每种杂草的数量和位置,确定喷射药剂的种类和剂量,以及每种喷射药剂的喷射路径。本发明能够识别杂草种类并确定药剂种类及剂量,并根据杂草位置确定喷射路径,针对杂草分布对农作物区进行局部喷射,在不影响除草效果的同时减少了药剂的使用量,减小了药剂浪费和环境污染。
附图说明
63.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
64.图1为本发明实施例中除草方法流程图;
65.图2为本发明实施例中除草系统的结构示意图。
具体实施方式
66.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
67.本发明的目的是提供一种除草方法及系统,能够确定喷射药剂的种类及剂量,针对杂草分布对农作物区进行局部药剂喷射,在不影响除草效果的同时减少了药剂的使用量。
68.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
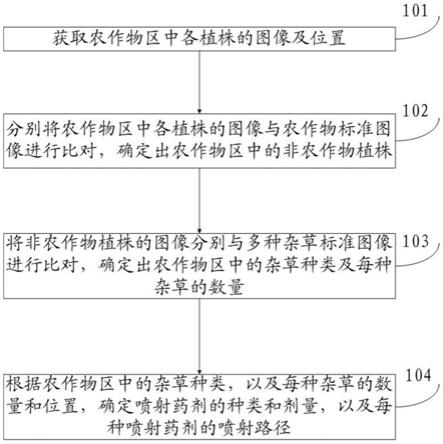
69.图1为本发明实施例中除草方法流程图,如图1所示,本发明提供了一种除草方法,包括:
70.步骤101:获取农作物区中各植株的图像及位置;
71.步骤102:分别将农作物区中各植株的图像与农作物标准图像进行比对,确定出农作物区中的非农作物植株;
72.步骤103:将非农作物植株的图像分别与多种杂草标准图像进行比对,确定出农作物区中的杂草种类及每种杂草的数量;
73.步骤104:根据农作物区中的杂草种类,以及每种杂草的数量和位置,确定喷射药
剂的种类和剂量,以及每种喷射药剂的喷射路径。
74.其中,步骤102,具体包括:
75.确定农作物区中任一植株为当前植株;
76.对当前植株的图像进行移动处理、等比例缩放处理和旋转处理,得到当前植株的多张图像;
77.分别将当前植株的多张图像与农作物标准图像进行比对,确定当前植株的多张图像中与农作物标准图像的重合率最大的图像对应的重合率为当前植株与农作物的第一重合率;
78.判断第一重合率是否小于重合率阈值,得到第一判断结果;
79.若第一判断结果为是,则确定当前植株为非农作物植株;
80.若第一判断结果为否,则确定当前植株为农作物植株。
81.步骤103,具体包括:
82.确定任一非农作物植株为当前非农作物植株;
83.对当前非农作物植株的图像进行移动处理、等比例缩放处理和旋转处理,得到当前非农作物植株的多张图像;
84.确定任一种杂草标准图像为当前杂草标准图像;
85.分别将当前非农作物植株的多张图像与当前杂草标准图像进行比对,确定当前非农作物植株的多张图像中与当前杂草标准图像的重合率最大的图像对应的重合率为当前非农作物植株与当前杂草的第二重合率;
86.更新当前杂草标准图像并返回步骤“分别将当前非农作物植株的多张图像与当前杂草标准图像进行比对,确定当前非农作物植株的多张图像中与当前杂草标准图像的重合率最大的图像对应的重合率为当前植株与当前杂草的第二重合率”,直至遍历所有杂草标准图像,得到当前非农作物植株与每种杂草的第二重合率;
87.确定多个第二重合率中的最大第二重合率,并判断最大第二重合率是否小于重合率阈值,得到第二判断结果;
88.若第二判断结果为否,则确定最大第二重合率对应杂草标准图像的杂草种类为当前非农作物植株的杂草种类;
89.若第二判断结果为是,则更新数据库;数据库用于存储农作物标准图像、多种杂草标准图像,以及每种杂草对应的药剂种类。
90.步骤104,具体包括:
91.确定农作物区中任一种杂草为当前杂草;
92.判断当前杂草的数量是否达到数量阈值,得到第三判断结果;
93.若第三判断结果为是,则根据当前杂草的种类确定喷射药剂的种类,并根据当前杂草的位置和载体的喷射半径,确定载体的多个悬停点;
94.根据每株杂草所需喷射药剂的剂量、每个悬停点中的杂草数量,以及悬停点的数量,确定喷射药剂的喷射总剂量;
95.根据多个悬停点,以路径最短为原则确定出载体搭载喷射药剂喷射当前杂草的最优途径;
96.载体搭载喷射总剂量的喷射药剂,按照最优途径进行药剂喷射。
97.具体的,以水稻为例,对本发明进行具体说明:
98.建立稻田定向除草系统,定向除草系统包括:数据库、稻田图像采集系统、决策系统和除草系统。
99.数据库包括水稻和稻田杂草不同生长时期的特征图像以及对应的除草剂使用种类和使用剂量。
100.稻田图像采集系统为无人机搭载高清摄像头,采用航拍的方式获得稻田的高清图像。
101.决策系统,第一步用水稻特征图像对比稻田图像中的每一株植物,标记出所有非水稻植株的位置;具体的,通过移动、等比例缩放、旋转,使特征图像与要对比的图像最大限度重合,重合程度达到50%以上,就认为是同一种植物。第二步用稻田杂草特征图对比稻田图像中的所有非水稻植株,标记出所有杂草的种类和位置;第三步统计出各种杂草的生物量;第四步确定需要的除草剂种类和数量;第五步规划出每种除草剂使用的最优路径。根据杂草分布位置、除草剂喷施半径规划,设置n个无人机悬停点,每个悬停点无人机可以覆盖m株杂草,对每株杂草喷施药剂用时t,喷施药剂用时n
×
m
×
t,悬停点之间飞行用时为k,悬停点覆盖所有杂草位置且n
×
m
×
t k的值最小的路径为最优路径。
102.除草系统,为无人机搭载农药喷施器,装载除草剂后根据决策系统规划的最优除草路径飞临杂草上空出喷施除草剂。
103.除草剂喷施方式为针对单株杂草的集中微量药剂喷雾。
104.图2为本发明实施例中除草系统的结构示意图,如图2所示,本发明提供了一种除草系统,包括:
105.图像及位置获取模块201,用于获取农作物区中各植株的图像及位置;
106.非农作物植株确定模块202,用于分别将农作物区中各植株的图像与农作物标准图像进行比对,确定出农作物区中的非农作物植株;
107.杂草种类及数量确定模块203,用于将非农作物植株的图像分别与多种杂草标准图像进行比对,确定出农作物区中的杂草种类及每种杂草的数量;
108.喷射路径确定模块204,用于根据农作物区中的杂草种类,以及每种杂草的数量和位置,确定喷射药剂的种类和剂量,以及每种喷射药剂的喷射路径。
109.其中,非农作物植株确定模块202,具体包括:
110.当前植株确定单元,用于确定农作物区中任一植株为当前植株;
111.第一图像处理单元,用于对当前植株的图像进行移动处理、等比例缩放处理和旋转处理,得到当前植株的多张图像;
112.第一重合率确定单元,用于分别将当前植株的多张图像与农作物标准图像进行比对,确定当前植株的多张图像中与农作物标准图像的重合率最大的图像对应的重合率为当前植株与农作物的第一重合率;
113.第一判断单元,用于判断第一重合率是否小于重合率阈值,得到第一判断结果;若第一判断结果为是,则调用非农作物植株确定单元;若第一判断结果为否,则调用农作物植株确定单元;
114.非农作物植株确定单元,用于确定当前植株为非农作物植株;
115.农作物植株确定单元,用于确定当前植株为农作物植株。
116.杂草种类及数量确定模块203,具体包括:
117.当前非农作物植株确定单元,用于确定任一非农作物植株为当前非农作物植株;
118.第二图像处理单元,用于对当前非农作物植株的图像进行移动处理、等比例缩放处理和旋转处理,得到当前非农作物植株的多张图像;
119.当前杂草标准图像确定单元,用于确定任一种杂草标准图像为当前杂草标准图像;
120.第二重合率确定单元,用于分别将当前非农作物植株的多张图像与当前杂草标准图像进行比对,确定当前非农作物植株的多张图像中与当前杂草标准图像的重合率最大的图像对应的重合率为当前非农作物植株与当前杂草的第二重合率;
121.当前杂草标准图像更新单元,用于更新当前杂草标准图像并返回步骤“分别将当前非农作物植株的多张图像与当前杂草标准图像进行比对,确定当前非农作物植株的多张图像中与当前杂草标准图像的重合率最大的图像对应的重合率为当前植株与当前杂草的第二重合率”,直至遍历所有杂草标准图像,得到当前非农作物植株与每种杂草的第二重合率;
122.第二判断单元,用于确定多个第二重合率中的最大第二重合率,并判断最大第二重合率是否小于重合率阈值,得到第二判断结果;若第二判断结果为否,则调用当前非农作物植株杂草种类确定单元;若第二判断结果为是,则调用数据库更新单元;
123.当前非农作物植株杂草种类确定单元,用于确定最大第二重合率对应杂草标准图像的杂草种类为当前非农作物植株的杂草种类;
124.数据库更新单元,用于更新数据库;数据库用于存储农作物标准图像、多种杂草标准图像,以及每种杂草对应的药剂种类。
125.喷射路径确定模块204,具体包括:
126.当前杂草确定单元,用于确定农作物区中任一种杂草为当前杂草;
127.第三判断单元,用于判断当前杂草的数量是否达到数量阈值,得到第三判断结果;若第三判断结果为是,则调用悬停点确定单元;
128.悬停点确定单元,用于根据当前杂草的种类确定喷射药剂的种类,并根据当前杂草的位置和载体的喷射半径,确定载体的多个悬停点;
129.喷射总剂量确定单元,用于根据每株杂草所需喷射药剂的剂量、每个悬停点中的杂草数量,以及悬停点的数量,确定喷射药剂的喷射总剂量;
130.最优途径确定单元,用于根据多个悬停点,以路径最短为原则确定出载体搭载喷射药剂喷射当前杂草的最优途径;
131.药剂喷射单元,用于控制载体搭载喷射总剂量的喷射药剂,按照最优途径进行药剂喷射。
132.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的系统相对应,所以描述的比较简单,相关之处参见系统部分说明即可。
133.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的系统及其核心思想;同时,对于本领域的一般技术人员,依据
本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。