1.本实用新型涉及一种工作台,尤其涉及一种高精度工作台。
背景技术:
2.工作台采用优质冷扎板精工制作而成,坚固的工作桌框架,牢固平稳,可使工作桌承重1000kg;多种工作桌面选择,可配合不同使用的要求;工具吊柜,侧柜灯架,调节脚杯,外形美观;层板,抽屉质量上乘,承重大,抽屉内可根据需要任意分隔;节约空间,适用性强。
3.现有的对物料进行加工时,通常是将物料放置在工作台上,通过现有的工作台对物料的位置进行精准调节,并通过机床对物料进行加工。
4.而现有的工作台设备存在以下两个缺点:
5.缺点一,由于现有的工作台没有对物料固定的机构,如此在通过现有机床设备对物料进行加工时,需要工人手动固定物料,机床对物料加工时产生的废料容易飞溅在工人的手部,有些废料的边角较为尖锐,如此容易划伤工人的手部造成危险。
6.缺点二,一些特殊的物料需要进行多角度加工,而现有工作台上没有对物料角度测量的设备,如此在需要对物料一些角度加工时,需要工人通过现有工具对物料的角度进行校准测量,随后需要用笔对物料需要加工的角度进行画线,然后工人根据物料上的画线对其进行加工,此方式的操作较为繁琐。
7.因此需要一种可提高安全性、可方便角度调节的高精度工作台。
技术实现要素:
8.为了克服工人手动固定物料,机床对物料加工产生的废料容易划伤手部造成危险,需要通过现有工具对物料的角度校准测量,并用笔对测量的角度进行画线,此方式的操作较为繁琐的缺点,要解决的技术问题是:提供一种可提高安全性、可方便角度调节的高精度工作台。
9.本实用新型的技术方案为:一种高精度工作台,包括支撑台、安装板、控制台、横向移动机构、竖向移动机构和调节机构,支撑台的侧壁设置有安装板,安装板的顶部设置有控制台,支撑台靠近安装板的一侧设置有横向移动机构,横向移动机构的上侧设置有竖向移动机构,横向移动机构和竖向移动机构均与控制台之间设置有线路连接,竖向移动机构的上侧设置有调节机构。
10.作为本实用新型的一种优选技术方案,横向移动机构包括槽形架、第一安装框、第一轴承座、第一滚珠丝杠、第一滚珠螺母块、第一支板、第一接触点、第二支板、第一测距传感器、第一十字滑块和驱动部件,槽形架固接在支撑台顶部靠近安装板的一侧,槽形架内底部中间开有第一倒梯形槽,槽形架外侧的支撑台顶部安装有第一安装框,第一安装框的顶部开有第一十字滑槽,第一十字滑槽下侧的第一安装框两侧均通过螺栓安装有第一轴承座,两个第一轴承座之间设置有第一滚珠丝杠,第一滚珠丝杠设置有第一滚珠螺母块,第一滚珠螺母块的下部为梯形,第一滚珠螺母块的下部滑动式设置在第一倒梯形槽内,第一滚
珠螺母块的侧壁安装有第一支板,第一支板的侧壁连接有第一接触点,一侧第一轴承座的侧壁安装有第二支板,第二支板的侧壁设置有第一测距传感器,第一测距传感器与第一接触点配合,第一测距传感器与控制台之间设置有线路连接,第一滚珠螺母块的顶部安装有第一十字滑块,第一十字滑块滑动式设置在第一十字滑槽内,槽形架顶部的两侧均开有第二十字滑槽,第二十字滑槽内滑动式设有第二十字滑块,两个第二十字滑块与第一十字滑块的顶部均与竖向移动机构连接,靠近第二支板的第一滚珠丝杠一端设置有驱动部件,驱动部件与支撑台连接。
11.作为本实用新型的一种优选技术方案,驱动部件包括第一电机座、第一伺服电机、第一带轮、第二带轮和第一皮带,第一电机座安装在支撑台内顶部,第一电机座的底部安装有第一伺服电机,第一伺服电机与控制台之间设置有线路连接,第一伺服电机的输出轴安装有第一带轮,靠近第二支板的第一滚珠丝杠一端设置有第二带轮,第二带轮与第一带轮之间绕有第一皮带。
12.作为本实用新型的一种优选技术方案,竖向移动机构包括移动板、第二安装框、第二轴承座、第二滚珠丝杠、第二滚珠螺母块、第三带轮、第二电机座、第二伺服电机、第四带轮、第二皮带、第三十字滑块和测距部件,移动板固接在两个第二十字滑块与第一十字滑块的顶部之间,移动板的顶部安装有第二安装框,第二安装框的内底部开有第二倒梯形槽,第二倒梯形槽两侧的第二安装框均设置有第二轴承座,两个第二轴承座之间设置有第二滚珠丝杠,第二滚珠丝杠设置有第二滚珠螺母块,第二滚珠螺母块的下部呈梯形,第二滚珠螺母块的下部滑动式设置在第二倒梯形槽内,第二滚珠丝杠远离第二滚珠螺母块的一端安装有第三带轮,移动板的顶部靠近第二安装框的一侧设置有第二电机座,第二电机座内设置有第二伺服电机,第二伺服电机与控制台之间设置有线路连接,第二伺服电机的输出轴穿过第二安装框,第二伺服电机的输出轴安装有第四带轮,第四带轮与第三带轮之间绕有第二皮带,第二安装框的顶部开有第三十字滑槽,第三十字滑槽内滑动式设有第三十字滑块,第三十字滑块与第二滚珠螺母块固接,第三十字滑块的顶部与调节机构固接,一侧第二轴承座与第二滚珠螺母块之间设置有测距部件,测距部件与控制台之间设置有线路连接。
13.作为本实用新型的一种优选技术方案,测距部件包括第三支板、第二接触点、第四支板和第二测距传感器,第三支板连接在第二滚珠螺母块的侧壁,第三支板的侧壁设置有第二接触点,靠近第三带轮一侧的第二轴承座侧壁安装有第四支板,第四支板的侧壁设置有第二测距传感器,第二测距传感器与第二接触点配合,第二测距传感器与控制台之间设置有线路连接。
14.作为本实用新型的一种优选技术方案,调节机构包括转动凸盘、转动凹盘、承载板、滚动轴承、螺杆、转动板、螺纹块、插板和橡胶板,转动凸盘固接在第三十字滑块的顶部,转动凸盘的顶部设置有转动凹盘,转动凹盘的顶部安装有承载板,承载板的顶部两侧均开有移动槽,承载板的两侧均嵌有滚动轴承,两个滚动轴承位于两个移动槽的外侧,两个滚动轴承之间设置有螺杆,螺杆的两端均连接有转动板,螺杆的两侧均设置有螺纹块,两个螺纹块分别滑动式设置在两个移动槽内,螺纹块的顶部开有卡槽,卡槽内设有插板,插板的侧壁连接有橡胶板。
15.作为本实用新型的一种优选技术方案,还包括指针和角度测量器,承载板的两侧均安装有指针,螺杆位于两个指针之间,转动凸盘的外侧壁连接有角度测量器,角度测量器
均与左右两个指针配合。
16.与现有技术相比,本实用新型具有以下优点:本实用新型通过横向移动机构和竖向移动机构配合,可对调节机构的位置进行精准控制,且通过调节机构可方便对物料进行固定,同时可对物料需要加工的角度进行调节;通过指针和角度测量器的配合,可简化对物料需要加工的角度进行校准,方便快速对物料需要加工的角度进行调节。
附图说明
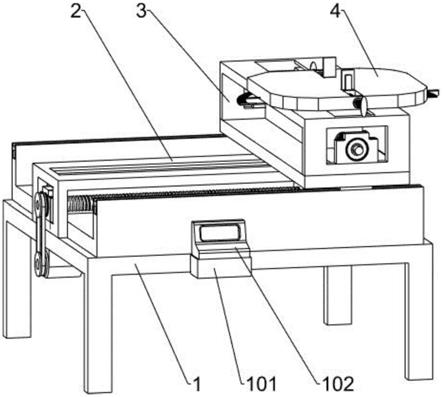
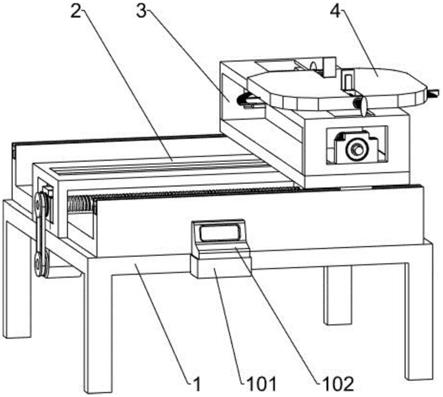
17.图1为本实用新型的立体结构示意图。
18.图2为本实用新型横向移动机构的立体结构示意图。
19.图3为本实用新型槽形架的立体结构示意图。
20.图4为本实用新型第一滚珠丝杠的立体结构示意图。
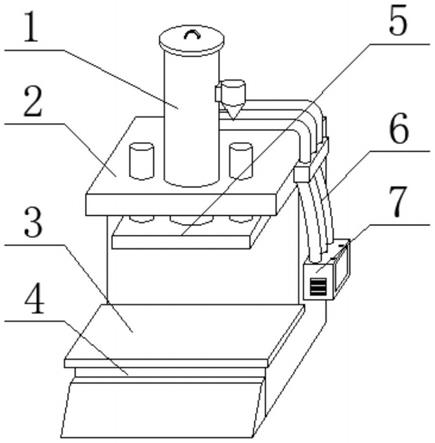
21.图5为本实用新型竖向移动机构的立体结构示意图。
22.图6为本实用新型第二安装框的立体结构示意图。
23.图7为本实用新型第二滚珠丝杠的立体结构示意图。
24.图8为本实用新型第二轴承座的立体结构示意图。
25.图9为本实用新型承载板的立体结构示意图。
26.图10为本实用新型转动凸盘的立体结构示意图。
27.图11为本实用新型转动凹盘的立体结构示意图。
28.图12为本实用新型调节机构的立体结构示意图。
29.图13为本实用新型螺纹块的立体结构示意图。
30.其中:1
‑
支撑台,101
‑
安装板,102
‑
控制台,2
‑
横向移动机构,201
‑
槽形架,202
‑
第一倒梯形槽,203
‑
第一安装框,204
‑
第一十字滑槽,205
‑
第一轴承座,206
‑
第一滚珠丝杠,207
‑
第一滚珠螺母块,208
‑
第一支板,209
‑
第一接触点,210
‑
第二支板,211
‑
第一测距传感器,212
‑
第一十字滑块,213
‑
第二十字滑槽,214
‑
第二十字滑块,215
‑
第一电机座,216
‑
第一伺服电机,217
‑
第一带轮,218
‑
第二带轮,219
‑
第一皮带,3
‑
竖向移动机构,301
‑
移动板,302
‑
第二安装框,303
‑
第二倒梯形槽,304
‑
第二轴承座,305
‑
第二滚珠丝杠,306
‑
第二滚珠螺母块,307
‑
第三带轮,308
‑
第二电机座,309
‑
第二伺服电机,310
‑
第四带轮,311
‑
第二皮带,312
‑
第三十字滑槽,313
‑
第三十字滑块,314
‑
第三支板,315
‑
第二接触点,316
‑
第四支板,317
‑
第二测距传感器,4
‑
调节机构,401
‑
转动凸盘,402
‑
转动凹盘,403
‑
承载板,404
‑
移动槽,405
‑
滚动轴承,406
‑
螺杆,407
‑
转动板,408
‑
螺纹块,409
‑
卡槽,410
‑
插板,411
‑
橡胶板,5
‑
指针,6
‑
角度测量器。
具体实施方式
31.首先要指出,在不同描述的实施方式中,相同部件设有相同的附图标记或者说相同的构件名称,其中,在整个说明书中包含的公开内容能够按意义转用到具有相同的附图标记或者说相同的构件名称的相同部件上。在说明书中所选择的位置说明、例如上、下、侧向等等也参考直接描述的以及示出的附图并且在位置改变时按意义转用到新的位置上。
32.实施例1
33.一种高精度工作台,如图1所示,包括支撑台1、安装板101、控制台102、横向移动机
构2、竖向移动机构3和调节机构4,支撑台1的前侧壁设置有安装板101,安装板101的顶部设置有控制台102,安装板101后侧的支撑台1设置有横向移动机构2,横向移动机构2的上侧设置有竖向移动机构3,横向移动机构2和竖向移动机构3均与控制台102之间设有线路连接,竖向移动机构3的上侧设置有调节机构4。
34.当需要对物料进行加工时,用户通过调节机构4将物料固定,如此可不需手动对物料固定,从而可避免加工时产生的废料将手部划伤,进而可提高安全性,随后用户通过控制台102使横向移动机构2和竖向移动机构3工作,横向移动机构2和竖向移动机构3工作可通过调节机构4将物料移动至合适位置,随后用户通过工具对物料需要加工的角度进行测量校准,然后用户对物料需要加工的角度进行调节,并通过机床对物料进行加工即可,当物料加工完成后,用户通过调节机构4解除对物料的固定,随后用户加工后的物料取下即可。
35.实施例2
36.在实施例1的基础之上,如图2
‑
图4所示,横向移动机构2包括槽形架201、第一安装框203、第一轴承座205、第一滚珠丝杠206、第一滚珠螺母块207、第一支板208、第一接触点209、第二支板210、第一测距传感器211、第一十字滑块212和驱动部件,槽形架201固接在支撑台1的顶部,槽形架201位于安装板101的后侧,槽形架201内底部中间开有第一倒梯形槽202,支撑台1顶部左右两侧之间安装有第一安装框203,第一安装框203位于槽形架201的外侧,第一安装框203的顶部开有第一十字滑槽204,第一安装框203的左右两侧均通过螺栓安装有第一轴承座205,第一轴承座205位于第一十字滑槽204的下侧,左右两个第一轴承座205之间设置有第一滚珠丝杠206,第一滚珠丝杠206的右部设置有第一滚珠螺母块207,第一滚珠螺母块207的下部为梯形,第一滚珠螺母块207的下部滑动式设置在第一倒梯形槽202内,第一滚珠螺母块207后侧壁安装有第一支板208,第一支板208的左侧壁连接有第一接触点209,左侧第一轴承座205的后侧壁安装有第二支板210,第二支板210的右侧壁设置有第一测距传感器211,第一测距传感器211与第一接触点209配合,第一测距传感器211与控制台102之间设置有线路连接,第一滚珠螺母块207的顶部安装有第一十字滑块212,第一十字滑块212滑动式设置在第一十字滑槽204内,槽形架201顶部的前后两侧均开有第二十字滑槽213,第二十字滑槽213内滑动式设有第二十字滑块214,前后两个第二十字滑块214与第一十字滑块212的顶部均与竖向移动机构3连接,第一滚珠丝杠206的左端安装有驱动部件,驱动部件与支撑台1连接。
37.当需要对物料进行加工时,用户通过调节机构4将物料固定,随后用户通过控制台102使驱动部件工作,同时通过控制台102输入第一测距传感器211与第一接触点209之间需要相距的距离,驱动部件工作可使第一滚珠丝杠206顺时针转动或逆时针转动,第一滚珠丝杠206顺时针转动或逆时针转动可使第一滚珠螺母块207向左或向右移动,第一滚珠螺母块207向左或向右移动可通过第一支板208使第一接触点209向左或向右移动,第一测距传感器211可将与第一接触点209之间的距离反馈至控制台102上,当第一接触点209向左或向右移动与第一测距传感器211的距离,是控制台102的设定距离时,第一测距传感器211将距离反馈控制台102,控制台102随之关闭驱动机构,如此可精准的对竖向移动机构3向左或向右移动的位置进行控制。
38.如图2所示,驱动部件包括第一电机座215、第一伺服电机216、第一带轮217、第二带轮218和第一皮带219,第一电机座215安装在支撑台1内顶部的左侧,第一电机座215的底
部安装有第一伺服电机216,第一伺服电机216与控制台102之间设置有线路连接,第一伺服电机216的输出轴安装有第一带轮217,第一滚珠丝杠206的左端设置有第二带轮218,第二带轮218与第一带轮217之间绕有第一皮带219。
39.当需要对物料进行加工时,用户通过调节机构4将物料固定,随后用户通过控制台102使第一伺服电机216工作,第一伺服电机216工作可使第一带轮217顺时针转动或逆时针转动,通过第一皮带219可使第二带轮218顺时针转动或逆时针转动,第二带轮218顺时针转动或逆时针转动可使第一滚珠丝杠206顺时针转动或逆时针转动,如此可使第一滚珠螺母块207向右或向左移动,当第一接触点209向左或向右移动与第一测距传感器211的距离,是控制台102的设定距离时,第一测距传感器211将距离反馈至控制台102,控制台102随之关闭第一伺服电机216,通过第一测距传感器211和第一接触点209的配合,可精准对竖向移动机构3向左或向右移动的位置进行控制。
40.实施例3
41.在实施例2的基础之上,如图5
‑
图8所示,竖向移动机构3包括移动板301、第二安装框302、第二轴承座304、第二滚珠丝杠305、第二滚珠螺母块306、第三带轮307、第二电机座308、第二伺服电机309、第四带轮310、第二皮带311、第三十字滑块313和测距部件,移动板301固接在前后两个第二十字滑块214与第一十字滑块212的顶部之间,移动板301的顶部安装有第二安装框302,第二安装框302的内底部开有第二倒梯形槽303,第二倒梯形槽303前后两侧的第二安装框302均设置有第二轴承座304,前后两个第二轴承座304之间设置有第二滚珠丝杠305,第二滚珠丝杠305的前部设置有第二滚珠螺母块306,第二滚珠螺母块306的下部呈梯形,第二滚珠螺母块306的下部滑动式设置在第二倒梯形槽303内,第二滚珠丝杠305的后端安装有第三带轮307,第二滚珠丝杠305右侧的移动板301的顶部设置有第二电机座308,第二电机座308内设置有第二伺服电机309,第二伺服电机309与控制台102之间设置有线路连接,第二伺服电机309输出轴的后端穿过第二安装框302,第二伺服电机309输出轴的后端安装有第四带轮310,第四带轮310与第三带轮307之间绕有第二皮带311,第二安装框302的顶部开有第三十字滑槽312,第三十字滑槽312内滑动式设有第三十字滑块313,第三十字滑块313的底部与第二滚珠螺母块306的顶部固接,第三十字滑块313的顶部与调节机构4固接,左侧第二轴承座304与第二滚珠螺母块306之间设置有测距部件,测距部件与控制台102之间设置有线路连接。
42.当需要对物料进行加工时,用户通过调节机构4将物料固定,随后用户通过控制台102使第二伺服电机309工作,同时用户通过控制台102为测距部件设定距离,第二伺服电机309工作可使第四带轮310顺时针转动或逆时针转动,通过第二皮带311可使第三带轮307顺时针转动或逆时针转动,第三带轮307顺时针转动或逆时针转动可使第二滚珠丝杠305顺时针转动或逆时针转动,第二滚珠螺母块306随之向前或向后移动,通过测距部件可对第二滚珠螺母块306向前或向后移动进行精准控制,当第二滚珠螺母块306向前或向后移动至控制台102的设定位置时,测距部件将距离反馈至控制台102,控制台102随之关闭第二伺服电机309,如此可对调节机构4的位置进行精准控制,从而可方便对物料进行加工。
43.如图7和图8所示,测距部件包括第三支板314、第二接触点315、第四支板316和第二测距传感器317,第三支板314连接在第二滚珠螺母块306的右侧壁,第三支板314的后侧壁设置有第二接触点315,后侧第二轴承座304右侧壁安装有第四支板316,第四支板316的
前侧壁设置有第二测距传感器317,第二测距传感器317与第二接触点315配合,第二测距传感器317与控制台102之间设置有线路连接。
44.当需要对物料进行加工时,用户通过调节机构4将物料固定,随后用户通过控制台102使第二伺服电机309工作,同时用户通过控制台102对第二接触点315与第二测距传感器317之间的距离进行设定,第二滚珠螺母块306向前或向后移动通过第三支板314可使第二接触点315向前或向后移动,当第二接触点315向前或向后移动达到与第二测距传感器317之间设定的距离时,第二测距传感器317将距离反馈至控制台102,控制台102随之关闭第二伺服电机309工作,如此可对调节机构4的位置进行精准控制,从而可方便对物料进行加工。
45.如图9
‑
图13所示,调节机构4包括转动凸盘401、转动凹盘402、承载板403、滚动轴承405、螺杆406、转动板407、螺纹块408、插板410和橡胶板411,转动凸盘401固接在第三十字滑块313的顶部,转动凸盘401的顶部设置有转动凹盘402,转动凸盘401与转动凹盘402滑动配合,转动凹盘402的顶部安装有承载板403,承载板403的顶部前后两侧均开有移动槽404,承载板403的前后两侧均嵌有滚动轴承405,前后两个滚动轴承405位于前后两个移动槽404的外侧,前后两个滚动轴承405之间设置有螺杆406,螺杆406的前后两端均连接有转动板407,螺杆406的前后两侧均设置有螺纹块408,前后两个螺纹块408分别滑动式设置在前后两个移动槽404内,螺纹块408的顶部开有卡槽409,卡槽409内设有插板410,插板410的侧壁连接有橡胶板411。
46.当需要对物料进行加工时,用户通过转动板407使螺杆406顺时针转动,由于螺杆406两侧的螺纹相反,螺杆406顺时针转动可使前后两侧的螺纹块408相远离,前后两个螺纹块408相远离通过插板410可使前后两侧的橡胶板411相远离,随后用户将需要加工的物料放置在前后两个橡胶板411之间,然后用户通过转动板407使螺杆406逆时针转动,前后两侧的橡胶板411随之相靠拢对物料进行夹紧固定,随后用户通过工具对物料需要加工的角度进行调节校准,当对物料需要加工的角度进行调节校准完成后,用户转动承载板403,承载板403转动可使物料进行转动,当物料转动至画线处时,用户停止转动承载板403,随后用户重复上述操作对物料进行加工即可,当物料加工完成后,用户通过转动板407使螺杆406顺时针转动,前后两侧的橡胶板411随之相远离,如此可解除对物料的固定,随后用户将物料取走并更换,然后用户通过转动板407使螺杆406逆时针转动,前后两侧的橡胶板411随之相靠拢对物料固定,用户不断的重复上述操作即可对物料进行加工。
47.如图12所示,还包括指针5和角度测量器6,承载板403的左右两侧壁均安装有指针5,螺杆406位于左右两个指针5之间,转动凸盘401的外侧壁连接有角度测量器6,角度测量器6均与左右两个指针5配合。
48.通过指针5和角度测量器6的配合,可不需操作工具对物料需要加工的角度进行校准,并通过笔对校准的角度进行画线,如此可方便对物料进行精准加工。
49.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。