1.本实用新型涉及电梯制动技术领域,具体涉及一种电梯制动器响应时间检测装置。
背景技术:
2.电梯是服务于建筑物中的重要交通工具,与人民生活密切相关,其安全性一直备受关注。曳引机制动器作为电梯中动作最频繁的安全部件之一,能使电梯的电动机(电梯曳引机)在没有电源供应的情况下停止转动,并使轿厢有效地制停,电梯能否安全运行与制动器的工作状况密切相关。大量事故案例表明,电梯人身伤亡事故发生的主要原因之一就是制动器发生故障或者自身存在设计缺陷,从而导致电梯出现冲顶、蹾底、溜车甚至发生剪切等现象。因此,加强电梯制动器的安全检验尤为重要。
3.目前,电梯的制动器为机电式制动器(摩擦型),制动器在持续通电下保持松开状态(松闸),而电梯曳引机被制动部件(制动轮)一般采用机械方式与曳引轮、卷筒或者链轮等直接刚性连接从而保证电梯的安全运行。制动器主要由电磁铁、压缩弹簧和制动闸瓦组成,制动器抱闸后的制动力来源于压缩弹簧的压力转化为制动闸瓦与制动轮的摩擦力,制动器松闸与抱闸切换的驱动力来源于电磁吸力。当电梯需要紧急制停时,制动器电源切断,电磁铁失电,制动闸瓦在压缩弹簧的作用下与制动轮之间产生摩擦力作为制动力使电梯曳引机停止运转。
4.制动器制动响应时间是指制动器电源断电时间与制动器达到额定制动力矩或者制动器到达完全制动位置时间的差值。对于制动器制动响应时间的检测,目前,绝大部分制造厂家都是通过安装在制动器上的微动开关是否动作来判断制动器的抱闸和松闸,然后把制动器断电到微动开关动作反馈信号之间的时间差值作为制动器的响应时间。该检测方法所测得的响应时间误差较大,精度较低,一般都小于真实值,该检测值用于电梯的设计制造,可能导致电梯发生剪切、墩底或冲顶等重大事故。
5.因此,需要构建一种精度更高的检测装置和方法,检测得到更为精准的数据,提高电梯的安全性能。
技术实现要素:
6.本实用新型的目的是提供一种操作方便、检测准确的电梯制动器响应时间检测装置。
7.为了达到上述目的,本实用新型通过以下技术方案来实现:
8.一种电梯制动器响应时间检测装置,包括被测曳引机、控制柜和远程系统,检测装置通过控制柜与远程系统通讯连接,还包括扭矩传感器、负载电机和负载飞轮,所述被测曳引机与扭矩传感器之间依次连接万向联轴器、连接法兰、隔离轴和隔离轴承,所述扭矩传感器与负载电机相连,所述负载电机与负载飞轮通过膜片联轴器相连,所述扭矩传感器和负载电机分别与远程系统通讯连接。
9.进一步地,检测装置还包括底板以及底板上设置的支撑被测曳引机的曳引机座、支撑万向联轴器的联轴器支座、支撑隔离轴的隔离轴承座、支撑负载电机的电机底座和支撑膜片联轴器的联轴器支座。
10.进一步地,所述远程系统内置采集卡,采集卡可将模拟信号转化成数字信号。
11.本实用新型与现有技术相比,具有以下优点:
12.本实用新型一种电梯制动器响应时间检测装置,操作方便,检测准确,数据迁移性高,适用范围广泛,能够快速准确反映电梯制动器的实际制动性能,相比于原有的测试装置及方法更为准确,可为电梯制动器的进一步开发和测试提供技术支持。
附图说明
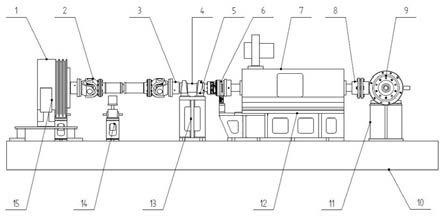
13.图1是本实用新型一种电梯制动器响应时间检测装置的结构示意图。
14.图2是本实用新型一种电梯制动器响应时间检测装置的信息通讯示意图。
15.图3是本实用新型一种电梯制动器响应时间检测方法的流程示意图。
16.图4是本实用新型一种电梯制动器响应时间检测方法的制动器响应时间分析图。
17.附图标记:1、被测曳引机;2、万向联轴器;3、连接法兰;4、隔离轴;5、隔离轴承;6、扭矩传感器;7、负载电机;8、膜片联轴器;9、负载飞轮;10、底板;11、联轴器支座;12、电机底座;13、隔离轴承座;14、联轴器支座;15、曳引机座。
具体实施方式
18.下面结合附图,对本实用新型的实施例作进一步详细的描述。
19.如图1所示,一种电梯制动器响应时间检测装置,包括被测曳引机1、控制柜和远程系统,检测装置通过控制柜与远程系统通讯连接,远程系统可为远程pc端,控制柜内包含进行通讯的数据线或通讯协议。检测装置,还包括扭矩传感器6、负载电机7和负载飞轮9,所述被测曳引机1与扭矩传感器6之间依次连接万向联轴器2、连接法兰3、隔离轴4和隔离轴承5,所述扭矩传感器6与负载电机7相连,所述负载电机7与负载飞轮9通过膜片联轴器8相连,所述扭矩传感器6和负载电机7分别与远程系统通讯连接。万向联轴器2、连接法兰3的设置用来平缓连接被测曳引机1和扭矩传感器6,隔离轴4及隔离轴承5的设置进一步减小数据传输误差,保证信号稳定输出。扭矩传感器6用来检测被测曳引机1上制动器的力矩。负载电机7用来为被测曳引机1提供动力。负载飞轮9用于模拟被测曳引机1实际工作时所需的系统惯量。膜片联轴器8的设置用来平缓连接负载电机7和负载飞轮9。
20.检测装置还包括底板10以及底板10上设置的支撑被测曳引机1的曳引机座15、支撑万向联轴器2的联轴器支座14、支撑隔离轴4的隔离轴承座13、支撑负载电机7的电机底座12和支撑膜片联轴器8的联轴器支座11,使得整个检测装置连接稳固。
21.如图2所示,被测曳引机1、扭矩传感器6、负载电机7通过控制柜与远程系统通讯连接。远程系统可控制被测曳引机1运行或制动,远程系统可控制负载电机7运行或停运;负载电机7可将电压信号实时传输给远程系统,扭矩传感器6可将力矩信号实时传输给远程系统。所述远程系统内置采集卡,采集卡可将模拟信号转化成数字信号。
22.一种电梯制动器响应时间检测方法,如图3所示,包括如下步骤:
23.s1)搭装检测装置,在底板10上依次连接被测曳引机1、万向联轴器2、连接法兰3、
隔离轴4、隔离轴承5、扭矩传感器6、负载电机7、膜片联轴器8和负载飞轮9并通过相应的支座支撑固定,负载飞轮9用于模拟被测曳引机1实际工作时所需的系统惯量;
24.s2)远程系统设定负载电机7的测量转速和被测曳引机1上制动器的额定力矩;
25.s3)远程系统控制开启负载电机7转动,待转速达到目标转速后,控制负载电机7停止输出,此时被测曳引机1上的制动器断电开启制动过程;
26.s4)远程系统进行电压信号和力矩信号的实时数据采集,数据采集的采样频率为1k~10khz,通过采集卡将模拟信号转化为数字信号,从而对采集到的数据计算分析得出制动器响应时间。
27.如图4所示,在远程系统pc端,系统内置的采集卡将连续采集到的模拟信号转化为数字信号,pc端的数据分析软件将数字信号绘制成图表,以时间为横轴,分别以转速、电压、扭矩为纵轴制图。根据实际情况,从第一次采集到电压信号为0的时刻一,到采集到扭矩达到额定力矩的时刻二,两者的时间差即为制动器响应时间。对于扭矩达到额定力矩的时刻二,可根据包括电梯规格等的实际情况进行选择。
28.本实用新型能够快速准确反映电梯制动器的实际制动性能,相比于原有的测试装置及方法更为准确,可为电梯制动器的进一步开发和测试提供技术支持。
29.以上所述仅是本实用新型优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本实用新型构思的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。