1.本发明涉及边坡加固技术领域,尤其涉及一种可回收多段自适应膨胀锚 杆。
背景技术:
2.目前,锚杆主要有两种形式:1、摩擦型锚杆,主要依靠锚固段与周围土 体的粘结力及摩擦力传递荷载,属于摩擦型锚杆。其主要缺点为:(1)锚固 力的大小取决于锚固段的长度及与锚固段接触的土体的性质等因素,如遇到 特殊的软弱土体,因而锚杆的拉拔力不高,则加固效果不佳;(2)普通高压 喷射扩大头锚杆存在水泥土强度低,锚固体与锚杆体之间的握裹力差的问题; 2、扩大型锚杆,锚杆通过加力撑开扩大结构,存在扩大结构张开困难,锚固 体与周围土体握裹力差,受压端部不密实,与孔洞贴合度不佳等问题。
技术实现要素:
3.本发明的目的在于提供一种可回收多段自适应膨胀锚杆,解决背景技术 中存在的技术问题。
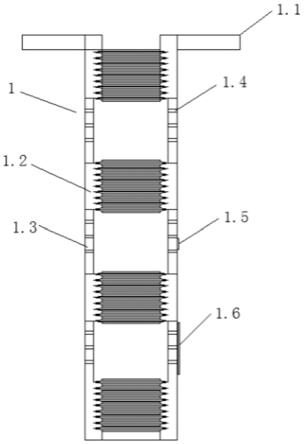
4.一种可回收多段自适应膨胀锚杆,包括锚杆壳,锚杆壳内部设置为空心 结构,锚杆壳内注入混凝土,锚杆壳设置在土体的钻孔内,锚杆壳包括若干 段内螺纹段和若干段膨胀段,两段内螺纹段之间设置有一段膨胀段,锚杆壳 的两端均设置内螺纹段。
5.进一步地,还包括拉张螺杆,拉张螺杆套入锚杆壳内与内螺纹段螺纹设 置,拉张螺杆拧紧拉伸膨胀段向外膨胀设置。
6.进一步地,还包括回收螺杆,回收螺杆套入锚杆壳内,回收螺杆与内螺 纹段螺纹设置,并向内推力拉伸若干段伸膨胀段收缩设置。
7.进一步地,回收螺杆包括直杆段、推力段和拧环,拧环设置在直杆段的 一端,推力段设置在直杆段的另一端,推力段设置为螺纹结构。
8.进一步地,膨胀段设置为空管结构,侧壁上设置有若干个注浆孔,注浆 孔设置为椭圆形结构。
9.进一步地,内螺纹段的外部设置为封闭结构,内部设置有内螺纹,内螺 纹段的厚度比膨胀段的厚度厚。
10.进一步地,还包括扩大钻头和电钻,扩大钻头与电钻转轴连接,扩大钻头 套入锚杆壳内并旋转粉碎混凝土设置,清空锚杆壳内的混凝土。
11.进一步地,包括压力传感器和弯曲软角位移传感器,压力传感器和弯曲 软角位移传感器均设置在膨胀段的外侧,压力传感器检测膨胀段(1.3)的外 侧受到土体的压力大小,弯曲软角位移传感器用于检测膨胀段(1.3)伸张情 况。
12.进一步地,锚杆壳上还设置有数据检测装置,数据检测装置上设置有检测 接口,所有的压力传感器和弯曲软角位移传感器均通过导线伸出锚杆壳的前 端,并设置数据采集口,数据采集口上设置有防水盒盖,不检测时将防水盒 盖盖合设置,在安装和回收膨胀锚杆时,使用数据检测装置检测膨胀段的受 力数据和伸张情况。
13.进一步地,膨胀锚杆安装和回收的过程为:使用钻机钻孔将锚杆壳放入 孔中,锚杆壳中间穿过拉张螺杆进行扭紧,拉张螺杆给锚杆壳施加反向拉力 对进行拉紧,膨胀段侧向膨胀,与周边土体自适应紧密贴合,与土体锚固, 握裹力强,使用数据检测装置检测膨胀段所受到的压力与预设的握裹力是否 相符,同时使用数据检测装置检测弯曲软角位移传感器的弯曲程度,避免出 现断裂,将拉张螺杆反向取出,然后向锚杆壳的中间锚固孔进行注浆,加强 锚固力,在使用期间定时使用数据检测装置对压力传感器和弯曲软角位移传 感器进行检测,查看各段膨胀段的握裹力和弯曲程度数据,出现损坏时,及 时更换,使用完后,如需要回收时,从中孔放入扩大钻头,扩大钻头在锚杆 壳内正转,破除管内水泥浆,到达锚杆壳底部后反转清除底部混凝土,破除 底部灌注的水泥浆,然后扭入回收螺杆到螺纹末尾段,向下敲击,一边敲击 一边使用数据检测装置对压力传感器和弯曲软角位移传感器进行检测,查看 各段膨胀段的握裹力和弯曲程度数据,使得膨胀结构重新恢复平直,拔出锚 杆。
14.膨胀锚杆受力过程为:膨胀锚杆则是依靠中间锚固段侧壁摩阻力、膨胀 截面锚固侧壁摩阻力以及土体对膨胀头端面的阻力三种形式来传递分散荷 载,可将其分为n段进行力学性能分析,n为正整数,因此一段变截面抗拔力 由三部分组成:
15.t=t1 t2 t
d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
16.式中:t1为l1段普通非膨胀锚固段侧壁摩阻所提供的抗拔力:
17.t1=πd1l1τ
f
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
18.式中:d1和l1为锚杆非膨胀锚固段直径和长度,τ
f
为非膨胀锚固段土体与 锚固筋侧壁之间的摩阻强度;
19.t2为锚杆膨胀锚固段侧壁摩阻所提供的抗拔力:
20.t2=πd2l2τ
fd
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
21.其中d2和l2为锚杆非膨胀锚固段直径和长度,τ
fd
为非膨胀锚固段土体与锚 固筋侧壁之间的摩阻强度;
22.td为土体对膨胀端面的正压力所提供的抗拔力:
[0023][0024]
式中:σ
d
为土体作用于变截面上的正压力强度,与膨胀端的埋深、膨胀 端前土体情况以及锚杆的工作状态有关;
[0025]
膨胀锚杆位移与轴力分析过程为:
[0026]
根据剪切位移法,竖向受荷锚杆体周围土的变形可理想的视作同心圆柱 体,根据弹性理论写出土体竖向平衡微分方程:
[0027][0028]
锚杆体受荷后,锚杆体处剪应力τ
rz
的增大远大于σ
z
,取
[0029][0030]
式中,r0为锚杆的半径,τ0为锚杆侧边剪应力,
[0031]
方程的解为:
[0032][0033]
由几何方程,剪切变形为:
[0034][0035]
其中u
s
为径向位移,s为土体竖向位移,略去物理方程为:
[0036][0037]
得到
[0038][0039]
方程的解为:
[0040][0041]
即:
[0042][0043]
其中r
m
为有效影响半径,g为土体的剪切模量,τ(z)为z位置处的锚杆侧摩阻 力;r0为锚杆半径;r
m
为影响半径;r
m
为锚杆侧土剪切变形可忽略的范围, r
m
=χ1χ2l1(1
‑
ν
s
),χ1、χ2为土体不均匀程度经验系数,ν
s
为土体泊松比,r为 与锚杆中心轴的距离,
[0044]
根据锚杆与土接触面的位移协调条件,对于等截面锚杆,可得到的锚杆 侧摩阻力为:
[0045][0046]
对微分单元受力静力平衡条件:
[0047][0048]
式中:u
p
为锚杆周长,τ
ν
(z)为锚杆侧深度z处摩阻力,q(z)为锚杆深度z处轴 力,
[0049]
微单元的弹性压缩为:
[0050][0051]
式中,和a
p
分别为锚杆的弹性模量和横截面积代入式(13)可得:
[0052]
[0053]
令其中k
v
为锚杆侧土体弹簧刚度,
[0054]
可得锚杆微分方程为:
[0055][0056]
解的位移和轴力为:
[0057]
s(z)=ae
αz
be
‑
αz
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0058]
q(z)=
‑
ae
p
a
p
αe
αz
be
p
a
p
αe
‑
αz
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)
[0059]
其中c1、c1为常数,可由锚杆体边界条件确定,将上式用矩阵表示:
[0060][0061]
膨胀变截面锚杆锚固力分成三部分,第一部分为细截面杆体l1段与土体 的摩阻力,第二部分为粗截面杆体l2段与土体的摩阻力,第三部分为变截面 处的端阻力,
[0062]
对于变截面锚杆,在采用剪切位移法进行轴力及位移的推导时,将变截 面锚杆分两段即l1段和l2段,忽略变截面引起的锚杆周围土体位移场的影 响,分别应用前述等截面锚杆杆体位移及杆体轴力解,将变截面处的端阻力 和位移连续简化为边界条件,
[0063]
第一段边界条件为:
[0064]
当z=0时,p1(0)=p;当z=l1时,p1(l1)=t;
[0065]
式中:t为第一端锚杆在变截面处的轴力
[0066]
第二段边界条件为:
[0067]
当z=l1时,p2(l1)=t
‑
t
d
;当z=l时,p2(l)=q;
[0068]
式中:l=l1 l2为锚杆微段长度,td为变截面处土体的端阻力, 变截面锚杆l1段与l2段在变截面处的位移连续条件
[0069]
s1(l1)=s2(l1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(20)
[0070]
将第一段边界条件代入式(18)得
[0071]
‑
e
p1
a
p1
α1(a1‑
b1)=p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0072][0073]
将第二段边界条件代入式(18)得
[0074][0075][0076]
第一段与第二段的连续条件式(20)可表示为:
[0077][0078]
联立式(21)、(22)、(23)、(24)、(25)可得系数a1、a2、b1、 b2可计算出第一段锚杆位移和轴力的解析式,代入式(12)可得第一段锚杆 与第二段锚杆侧摩阻力,进而可得第一二段抗拔力;
[0079]
锚杆变截面处膨胀端面应力计算:
[0080]
在锚杆变截面上端取一土体微单元作为考察对象,以锚杆轴线方向为z 轴,为竖直方向,水平方向分别为x轴,则土体被压缩的极限状态下, 极限状态下土体单元的各个方向的应力表达式:
[0081]
σ
x
=k0γl1 ξσ
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0082]
σ
y
=k0γl1 ξσ
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(27)
[0083]
σ
z
=γl1 σ
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(28)
[0084]
式中:σ
t
为锚杆拉力在土体单元z方向上产生的应力增量,k0为变截面上 端土的静止土压力系数,可按计算;ξ为锚杆发生位移时变截 面上端土反映挤土效应的侧压力系数,可按经验公式ξ=(0.5~0.95)k
a
计算(与 变截面处土体的硬度有关,对较坚硬的土体可取0.95,对软土建议取0.5), 此外和分别为变截面上端土体的主动和被动 土压力系数,其中c、为土体的粘聚力、内摩擦角;
[0085]
土体单元达到极限状态时,σ
z
为最大主应力σ1,σ
x
为最小主应力σ3,根 据摩尔库伦强度理论有
[0086][0087]
联立以上得
[0088][0089]
当锚杆变截面处土体各点均达到极限应力状态下时,变截面处的竖向压应力 所提供的极限抗拔力:
[0090][0091]
对于整段锚杆,可根据每段锚杆间的连续条件,结合锚底和锚头得边界 条件,锚底轴力为0,锚头轴力为已知,计算出整段锚杆的荷载传递函数;
[0092]
因此变截面锚杆抗拔力计算公式为:
[0093]
t=t1 t2 t
d
[0094][0095]
本发明采用了上述技术方案,本发明具有以下技术效果:
[0096]
本发明扭紧张拉螺杆后持续加力,锚杆膨胀段膨胀,膨胀过程会自适应 贴合周围岩体,贴合度好,握裹力强,膨胀贴合度好,向内注浆后,相对于 摩擦式、扩大式锚杆,抗拔力更强,针对城市区域需要回收锚杆的情况,锚 杆可回收,避免突破地下红线,可以检测安装时的内部受理情况和回收时是 否变直,具有回收效率高,实时检测内部的受力情况,出现损坏技术更换, 避免事故发生。
附图说明
[0097]
图1为本发明锚杆壳结构示意图。
[0098]
图2为本发明锚杆壳拉张后结构示意图。
[0099]
图3为本发明拉张螺杆结构示意图。
[0100]
图4为本发明回收螺杆结构示意图。
[0101]
图5为本发明膨胀后锚杆贴合岩体结构示意图。
[0102]
图6为本发明钻头清除混凝土结构示意图。
[0103]
图7为本发明膨胀锚杆微段力学示意图。
[0104]
图8为本发明锚杆受力模型图。
[0105]
图9为本发明锚杆侧土单元应力示意图。
[0106]
图10为本发明第一段边界条件示意图。
[0107]
图11为本发明第二段边界条件示意图。
[0108]
图12为本发明变截面膨胀锚杆土体示意图。
[0109]
图13为本发明注浆机构结构示意图。
[0110]
图中标号:1
‑
锚杆壳;1.1
‑
可拆卸圆盘;1.2
‑
内螺纹段;1.3
‑
膨胀段;1.4
‑ꢀ
注浆孔;1.5
‑
压力传感器;1.6
‑
弯曲软角位移传感器;2
‑
拉张螺杆;3
‑
回收螺杆; 3.1
‑
直杆段;3.2
‑
推力段;3.3
‑
拧环;4
‑
土体;5
‑
扩大钻头;6
‑
注浆机构;6.1
‑ꢀ
螺纹保护段;6.2
‑
注浆段;6.3
‑
注浆漏孔。
具体实施方式
[0111]
为使本发明的目的、技术方案及优点更加清楚明白,举出优选实施例, 对本发明进一步详细说明。然而,需要说明的是,说明书中列出的许多细节 仅仅是为了使读者对本发明的一个或多个方面有一个透彻的理解,即便没有 这些特定的细节也可以实现本发明的这些方面。
[0112]
一种可回收多段自适应膨胀锚杆,如图1所示,包括锚杆壳1,锚杆壳 1内部设置为空心结构,锚杆壳1内注入混凝土,锚杆壳1设置在土体的钻孔 内,锚杆壳1包括若干段内螺纹段1.2和若干段膨胀段1.3,两段内螺纹段1.2 之间设置有一段膨胀段1.3,锚杆壳1的两端均设置内螺纹段1.2,锚杆壳1 安装进土体内后,膨胀段1.3向外拉张与土体紧密贴合,与土体锚固。锚杆壳 1使用金属材料制成,设置为金属壳体结构。锚杆壳1的前端设置有可拆卸圆 盘1.1与锚杆壳1的前端连接,可拆卸圆盘1.1的直径比锚杆壳1的直径大。
[0113]
本发明实施例中,如图3所示,还包括拉张螺杆2,拉张螺杆2套入锚杆 壳1内与内螺纹段1.2螺纹设置,拉张螺杆2拧紧拉伸膨胀段1.3向外膨胀设 置。
[0114]
本发明实施例中,如图4所示,还包括回收螺杆3,回收螺杆3套入锚杆 壳1内,回收螺杆3与内螺纹段1.2螺纹设置,并向内推力拉伸若干段伸膨胀 段1.3收缩设置。回收螺杆3包括直杆段3.1、推力段3.2和拧环3.3,拧环3.3 设置在直杆段3.1的一端,推力段3.2设置在直杆段3.1的另一端,推力段3.2 设置为螺纹结构。
[0115]
本发明实施例中,膨胀段1.3设置为空管结构,侧壁上设置有若干个注浆 孔1.4,注浆孔1.4设置为椭圆形结构。一开始为椭圆形结构,当出现拉张时, 会变为圆形结构,使得混凝土更好的从注浆孔1.4流出外部与土体更好的结 合。内螺纹段1.2的外部设置为封
闭结构,内部设置有内螺纹,内螺纹段1.2 的厚度比膨胀段1.3的厚度厚。内螺纹段1.2设置更厚,是为了避免安装和拉 伸的时候出现变形的情况。
[0116]
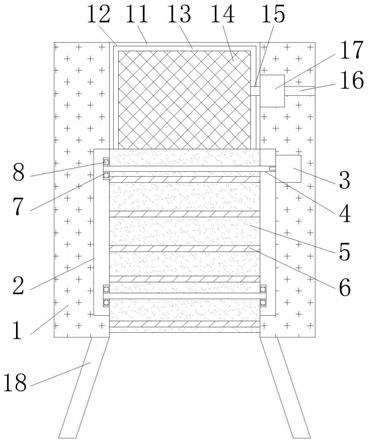
如图12所示,锚杆壳1注浆时,将设置的注浆机构6拧入锚杆壳1内, 注浆机构6内部设置为空心结构,包括螺纹保护段6.1和注浆段6.2,螺纹保 护段6.1和注浆段6.2相间设置,注浆段6.2上设置有注浆漏孔6.2,螺纹保护 段6.1与锚杆壳1的内螺纹段1.2螺纹设置,螺纹保护段6.1的长度与内螺纹 段1.2相同,将水泥浆从注浆机构6内部空心壳体注入,水泥浆从注浆漏孔 6.2流到锚杆壳1的膨胀段1.3的内部,并从注浆孔1.4流到外部土体。注浆 完后,待水泥浆从浆体变为固体后,时间为1
‑
2小时,将注浆机构6拧出,然 后拧入螺杆。注浆的时候采用专用的注浆结构,对准注浆孔,向外注浆,防 止浆液污染内部螺纹,后面张拉杆无法扭入,或者改为螺纹相匹配的钻头。
[0117]
本发明实施例中,如图5
‑
6所示,还包括扩大钻头5和电钻,扩大钻头5 与电钻转轴连接,扩大钻头5套入锚杆壳1内并旋转粉碎混凝土设置,清空 锚杆壳1内的混凝土。扩大钻头5主要是为了回收时清理内部空间。
[0118]
本发明实施例中,如图1所示,膨胀锚杆包括压力传感器1.5和弯曲软角 位移传感器1.6,压力传感器1.5和弯曲软角位移传感器1.6均设置在膨胀段 1.3的外侧,压力传感器1.5检测膨胀段1.3的外侧受到土体的压力大小,弯 曲软角位移传感器1.6用于检测膨胀段1.3伸张情况。还包括数据检测装置, 数据检测装置上设置有检测接口,所有的压力传感器1.5和弯曲软角位移传感 器1.6均通过导线伸出锚杆壳1的前端,并设置数据采集口,数据采集口上设 置有防水盒盖,不检测时将防水盒盖盖合设置,在安装和回收膨胀锚杆时, 使用数据检测装置检测膨胀段1.3的受力数据和伸张情况。
[0119]
膨胀锚杆安装和回收的过程为:使用钻机钻孔将锚杆壳1放入孔中,锚 杆壳1中间穿过拉张螺杆2进行扭紧,拉张螺杆2给锚杆壳1施加反向拉力 对进行拉紧,膨胀段1.3侧向膨胀,与周边土体4自适应紧密贴合,与土体锚 固,握裹力强,使用数据检测装置检测膨胀段1.3所受到的压力与预设的握裹 力是否相符,同时使用数据检测装置检测弯曲软角位移传感器1.6的弯曲程 度,避免出现断裂,将拉张螺杆2反向取出,然后向锚杆壳1的中间锚固孔 进行注浆,加强锚固力,在使用期间定时使用数据检测装置对压力传感器1.5 和弯曲软角位移传感器1.6进行检测,查看各段膨胀段1.3的握裹力和弯曲程 度数据,出现损坏时,及时更换,使用完后,如需要回收时,从中孔放入扩 大钻头5,扩大钻头5在锚杆壳1内正转,破除管内水泥浆,到达锚杆壳1底 部后反转清除底部混凝土,破除底部灌注的水泥浆,然后扭入回收螺杆3到 螺纹末尾段,向下敲击,一边敲击一边使用数据检测装置对压力传感器1.5和 弯曲软角位移传感器1.6进行检测,查看各段膨胀段1.3的握裹力和弯曲程度 数据,使得膨胀结构重新恢复平直,拔出锚杆。
[0120]
膨胀锚杆受力过程为:膨胀锚杆则是依靠中间锚固段侧壁摩阻力、膨胀 截面锚固侧壁摩阻力以及土体对膨胀头端面的阻力三种形式来传递分散荷 载,可将其分为n段进行力学性能分析,n为正整数,任意段力学简图如图7 所示。因此一段变截面抗拔力由三部分组成:
[0121]
t=t1 t2 t
d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0122]
式中:t1为l1段普通非膨胀锚固段侧壁摩阻所提供的抗拔力:
[0123]
t1=πd1l1τ
f
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0124]
式中:d1和l1为锚杆非膨胀锚固段直径和长度,τ
f
为非膨胀锚固段土体与 锚固筋侧壁之间的摩阻强度;
[0125]
t2为锚杆膨胀锚固段侧壁摩阻所提供的抗拔力:
[0126]
t2=πd2l2τ
fd
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0127]
其中d2和l2为锚杆非膨胀锚固段直径和长度,τ
fd
为非膨胀锚固段土体与锚 固筋侧壁之间的摩阻强度;
[0128]
td为土体对膨胀端面的正压力所提供的抗拔力:
[0129][0130]
式中:σ
d
为土体作用于变截面上的正压力强度,与膨胀端的埋深、膨胀 端前土体情况以及锚杆的工作状态有关;
[0131]
膨胀锚杆位移与轴力分析过程为:
[0132]
根据剪切位移法,竖向受荷锚杆体周围土的变形可理想的视作同心圆柱 体,如图8
‑
9所示,根据弹性理论写出土体竖向平衡微分方程:
[0133][0134]
锚杆体受荷后,锚杆体处剪应力τ
rz
的增大远大于σ
z
,取
[0135][0136]
式中,r0为锚杆的半径,τ0为锚杆侧边剪应力,
[0137]
方程的解为:
[0138][0139]
由几何方程,剪切变形为:
[0140][0141]
其中u
s
为径向位移,s为土体竖向位移,略去物理方程为:
[0142][0143]
得到
[0144][0145]
方程的解为:
[0146][0147]
即:
[0148][0149]
其中r
m
为有效影响半径,g为土体的剪切模量,τ(z)为z位置处的锚杆侧摩阻 力;r0为锚杆半径;r
m
为影响半径;r
m
为锚杆侧土剪切变形可忽略的范围, r
m
=χ1χ2l1(1
‑
ν
s
),χ1、χ2为土体不均匀程度经验系数,ν
s
为土体泊松比,r为 与锚杆中心轴的距离,
[0150]
根据锚杆与土接触面的位移协调条件,对于等截面锚杆,可得到的锚杆 侧摩阻力为:
[0151][0152]
对微分单元受力静力平衡条件:
[0153][0154]
式中:u
p
为锚杆周长,τ
ν
(z)为锚杆侧深度z处摩阻力,q(z)为锚杆深度z处轴 力,
[0155]
微单元的弹性压缩为:
[0156][0157]
式中,和a
p
分别为锚杆的弹性模量和横截面积代入式(13)可得:
[0158][0159]
令其中k
v
为锚杆侧土体弹簧刚度,
[0160]
可得锚杆微分方程为:
[0161][0162]
解的位移和轴力为:
[0163]
s(z)=ae
αz
be
‑
αz
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0164]
q(z)=
‑
ae
p
a
p
αe
αz
be
p
a
p
αe
‑
αz
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)
[0165]
其中c1、c1为常数,可由锚杆体边界条件确定,将上式用矩阵表示:
[0166][0167]
膨胀变截面锚杆锚固力分成三部分,第一部分为细截面杆体l1段与土体 的摩阻力,第二部分为粗截面杆体l2段与土体的摩阻力,如图10
‑
11所示, 第三部分为变截面处的端阻力,
[0168]
对于变截面锚杆,在采用剪切位移法进行轴力及位移的推导时,将变截 面锚杆分两段即l1段和l2段,忽略变截面引起的锚杆周围土体位移场的影 响,分别应用前述等截面锚杆杆体位移及杆体轴力解,将变截面处的端阻力 和位移连续简化为边界条件,
[0169]
第一段边界条件为:
[0170]
当z=0时,p1(0)=p;当z=l1时,p1(l1)=t;
[0171]
式中:t为第一端锚杆在变截面处的轴力
[0172]
第二段边界条件为:
[0173]
当z=l1时,p2(l1)=t
‑
t
d
;当z=l时,p2(l)=q;
[0174]
式中:l=l1 l2为锚杆微段长度,td为变截面处土体的端阻力, 变截面锚杆l1段与l2段在变截面处的位移连续条件
[0175]
s1(l1)=s2(l1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(20)
[0176]
将第一段边界条件代入式(18)得
[0177]
‑
e
p1
a
p1
α1(a1‑
b1)=p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0178][0179]
将第二段边界条件代入式(18)得
[0180][0181][0182]
第一段与第二段的连续条件式(20)可表示为:
[0183][0184]
联立式(21)、(22)、(23)、(24)、(25)可得系数a1、a2、b1、 b2可计算出第一段锚杆位移和轴力的解析式,代入式(12)可得第一段锚杆 与第二段锚杆侧摩阻力,进而可得第一二段抗拔力;
[0185]
锚杆变截面处膨胀端面应力计算:
[0186]
在锚杆变截面上端取一土体微单元作为考察对象,以锚杆轴线方向为z 轴,为竖直方向,水平方向分别为x轴,则土体被压缩的极限状态下,如图 12所示,
[0187]
极限状态下土体单元的各个方向的应力表达式:
[0188]
σ
x
=k0γl1 ξσ
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0189]
σ
y
=k0γl1 ξσ
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(27)
[0190]
σ
z
=γl1 σ
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(28)
[0191]
式中:σ
t
为锚杆拉力在土体单元z方向上产生的应力增量,k0为变截面上 端土的静止土压力系数,可按计算;ξ为锚杆发生位移时变截 面上端土反映挤土效应的侧压力系数,可按经验公式ξ=(0.5~0.95)k
a
计算(与 变截面处土体的硬度有关,对较坚硬的土体可取0.95,对软土建议取0.5), 此外和分别为变截面上端土体的主动和被动 土压力系数,其中c、为土体的粘聚力、内摩擦角;
[0192]
土体单元达到极限状态时,σ
z
为最大主应力σ1,σ
x
为最小主应力σ3,根 据摩尔库伦强度理论有
[0193][0194]
联立以上得
[0195][0196]
当锚杆变截面处土体各点均达到极限应力状态下时,变截面处的竖向压应力 所提供的极限抗拔力:
[0197][0198]
对于整段锚杆,可根据每段锚杆间的连续条件,结合锚底和锚头得边界 条件,锚底轴力为0,锚头轴力为已知,计算出整段锚杆的荷载传递函数;
[0199]
因此变截面锚杆抗拔力计算公式为:
[0200]
t=t1 t2 t
d
[0201][0202]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普 通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润 饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。