1.本发明属于水下声学测量领域,具体涉及一种基于时延信息的水下机动平台高精度测速方法。
背景技术:
2.声学测量技术是利用声波实现测量系统与水下传感器节点(基元)间的信息交互,进而确定水下机动平台的位置、姿态、速度等数据的技术或方法。因声波在水下良好的传播能力,声学测量技术逐渐在海洋环境监控、海洋调查、海底地形地貌勘测、水下侦查与警戒、海底工程施工及维修等诸多领域被广泛应用。
3.水下声学测速是水声测量技术的一个重要部分。传统的水下声学测速方法通常先利用多基元几何交汇定位方法确定平台位置,然后根据一段时间内测得的平台位置变化信息进而确定平台的速度,即位置差分测速法,该方法受位置测量精度影响严重,且至少需要3个基元同时测量才可实现。
技术实现要素:
4.本发明提供了一种基于时延信息的水下机动平台高精度测速方法,用以解决现有方法受位置测量精度影响严重的问题。
5.本发明通过以下技术方案实现:
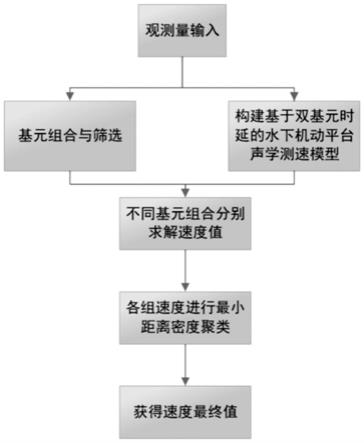
6.一种基于时延信息的水下机动平台高精度测速方法,所述高精度测速方法包括以下步骤:
7.步骤1:建立基于双基元时延的水下机动平台测速模型;
8.步骤2:基于步骤1的测速模型与测量信息进行基元组合,将不同的基元组合依据两基元与平台这三者之间不能共线的原则进行筛选;
9.步骤3:针对步骤2中不同的基元组合,求解出相应的平台速度;
10.步骤4:针对步骤3中不同的平台速度解进行密度聚类,计算获得平台速度最终值。
11.进一步的,所述步骤1具体为,双基元与水下机动平台间的几何关系构建的水下机动平台高精度速度测量模型如下:
[0012][0013]
a1=(ct'1)2‑
(ct1)2‑
(vt)2[0014]
a2=(ct'2)2‑
(ct2)2‑
(vt)2[0015]
b=4c2v2t2[0016]
其中,c为声速,t为脉冲信号发射周期,v代表机动平台运动速度,t1,t'1,t2,t'2分别为基元a和b测得的相邻两周期信号的传播时延,l代表基元a和基元b之间的距离。
[0017]
进一步的,所述步骤2具体为,若水下机动平台接收到了n个基元的观测信息,n>
2,将其两两组合则理论上应有种组合方式,并依据两基元与平台这三者之间不能共线的原则筛选出符合条件的基元组合方式n种,即
[0018]
进一步的,所述步骤3具体为,基于选取的基元组合方式,求解各模型方程,得到n个解,对得到的n种基元组合方式分别解算;
[0019]
由水下机动平台高精度速度测量模型,根据最小化均方误差的准则设置如下的目标函数:
[0020][0021]
其中:
[0022]
a1=(ct'1)2‑
(ct1)2‑
(vt)2[0023]
a2=(ct'2)2‑
(ct2)2‑
(vt)2[0024]
b=4c2v2t2[0025]
通过求解目标函数得到不同组合的速度解;其中,c为声速,t为脉冲信号发射周期,v代表机动平台运动速度,t1,t'1,t2,t'2分别为基元a和b测得的相邻两周期信号的传播时延,l代表基元a和基元b之间的距离,b为中间变量,a1为中间变量,a2为中间变量。
[0026]
进一步的,所述步骤4具体为,对求得的n个速度解进行最小距离密度聚类,等到有效速度样本集,并对有效速度样本集中的所有速度值取均值,得到平台速度的最终值。
[0027]
本发明的有益效果是:
[0028]
本发明无需求解平台位置,计算简单,且仅需要两个基元即可解算速度;当存在多个基元时,不同基元组合可提供较多的冗余信息,经过基元组合筛选及多组速度解密度聚类处理,可进一步提高测速精度。
附图说明
[0029]
图1本发明的方法流程图。
[0030]
图2为本发明方法几何原理示意图。
[0031]
图3为本发明方法测速误差空间分布图。
[0032]
图4为位置差分测速法误差空间分布图。
[0033]
图5为本发明与位置差分测速法测速精度对比图。
具体实施方式
[0034]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0035]
实施例1
[0036]
一种基于时延信息的水下机动平台高精度测速方法,所述高精度测速方法包括以下步骤:
[0037]
步骤1:建立基于双基元时延的水下机动平台测速模型;
[0038]
步骤2:基于步骤1的测速模型与测量信息进行基元组合,将不同的基元组合依据两基元与平台这三者之间不能共线的原则进行筛选;
[0039]
步骤3:针对步骤2中不同的基元组合,求解出相应的平台速度;
[0040]
步骤4:针对步骤3中不同的平台速度解进行密度聚类,计算获得平台速度最终值。
[0041]
步骤1中,具体的,按照图2所示的几何原理构建基于时延信息的高精度水声测速模型。假设水下布放四个基元,其坐标设置见表1。平台速度设为5m/s,航向角为30
°
。信号发射周期1s。声速为1500m/s。t1,t'1,t2,t'2分别为两基元测得的相邻两周期信号的传播时延。根据上述观测量完成测速模型的构建。
[0042]
表1四基元坐标设置
[0043][0044]
在本部分实施例中,步骤2中,具体的,平台机动过程中,假设其在每个运动位置处都接收到了全部基元的观测信息,将四个基元两两组合则理论上应有6种基元组合方式,并依据两基元与平台这三者之间不能共线的原则,将无法构成三角形的基元组合方式排除,得到组合数量记为n(n≤6)。以平台位于k(1603,1000)m处为例,此时符合条件的基元组合方式有6种,分别是:s1s2、s1s3、s1s4、s2s3、s2s4、s3s4。
[0045]
进一步的,所述步骤1具体为,双基元与水下机动平台间的几何关系构建的水下机动平台高精度速度测量模型如下:
[0046][0047]
a1=(ct'1)2‑
(ct1)2‑
(vt)2[0048]
a2=(ct'2)2‑
(ct2)2‑
(vt)2[0049]
b=4c2v2t2[0050]
其中,c为声速,t为脉冲信号发射周期,v代表机动平台运动速度,t1,t'1,t2,t'2分别为基元a和b测得的相邻两周期信号的传播时延,l代表基元a和基元b之间的距离。
[0051]
进一步的,所述步骤2具体为,若水下机动平台接收到了n个基元的观测信息,n>2,将其两两组合则理论上应有种组合方式,并依据两基元与平台这三者之间不能共线的原则筛选出符合条件的基元组合方式n种,即
[0052]
进一步的,所述步骤3具体为,基于选取的基元组合方式,求解各模型方程,得到n个解,对得到的n种基元组合方式分别解算;
[0053]
由水下机动平台高精度速度测量模型,根据最小化均方误差的准则设置如下的目标函数:
[0054][0055]
其中:
[0056]
a1=(ct'1)2‑
(ct1)2‑
(vt)2[0057]
a2=(ct'2)2‑
(ct2)2‑
(vt)2[0058]
b=4c2v2t2[0059]
通过求解目标函数得到不同组合的速度解;其中,c为声速,t为脉冲信号发射周期,v代表机动平台运动速度,t1,t'1,t2,t'2分别为基元a和b测得的相邻两周期信号的传播时延,l代表基元a和基元b之间的距离,b为中间变量,a1为中间变量,a2为中间变量。那么,平台位于k时,不同的基元组合方式解出的速度分别为:5.48m/s、4.81m/s、4.93m/s、5.50m/s、7.79m/s、6.21m/s。
[0060]
进一步的,所述步骤4具体为,对求得的n个速度解进行最小距离密度聚类,等到有效速度样本集,并对有效速度样本集中的所有速度值取均值,得到平台速度的最终值。得到的样本集合中包括:5.48m/s、4.81m/s、4.93m/s、5.50m/s。对集合中的所有速度值取均值,得到平台速度的最终值为5.18m/s。
[0061]
实施例2
[0062]
根据本发明所设计的水下机动平台高精度测速原理,测速精度受声传播时延误差、声速测量误差、声基元阵位误差影响,采用仿真对本发明进行验证和性能分析,并对结果进行说明。各参数设置同上。测量误差参数设置如表2。
[0063]
表2各测量误差参数设置表
[0064][0065]
为对比两方法在全空间范围的测速性能,将基元覆盖的区域(5km*5km)划分成2601(51*51)个网格点,计算每一个网格点处的测速误差,图3和图4分别给出本发明方法和位置差分测速法在整个基元空间内的测速误差分布情况。对比图3与图4可知,本发明方法的测速精度较高,整个空间内的测速误差都很小,测速均方根误差最大值为0.88m/s。而位置差分测速法的测速误差则达到了1.33m/s,且整体测速误差大于本发明方法。
[0066]
最后,计算图3和图4中的误差概率分布,得到图5。可见本发明方法的测速误差在0.5m/s之内的概率达到了0.83。而位置差分测速法的误差在0.5m/s之内的概率为0.52。因此,本发明方法能获得更高精度的测速结果,且在大范围布阵的空间内相比于位置差分测速法的效果更佳。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。