1.本发明涉及一种用于将浮空器固定至移动或固定接收结构的系统。它还涵盖了在该系统中实现的固定过程。
2.更特别地,本发明的领域是但不限于可操纵气球领域。
背景技术:
3.将大型飞艇系拴(tie
‑
down)至停放桅杆一直是棘手的操纵,这需要大量(有时多于100个)地面人员介入,并且对于这些飞艇的机组人员以及地面人员来说,这既是耗时的又是危险的。这也代表了巨大的运营成本。
4.而且,由于有时不利于接近地面的空气动力学条件以及这些飞行器(aircraft)的高固有惯性,导航这些飞艇接近地面接收结构时通常很复杂。
5.本技术人提交了申请wo2018099870a1,该申请描述了一种系拴系统,该系拴系统有助于浮空器接近接收结构并且使其能够比在先前条件下更容易且更安全地进行系拴。
6.为此,已经提出了一种用于将浮空器固定至接收结构的系统,该系统包括可控空中无人机,该可控空中无人机用于在所述浮空器与承载缆索的第一端(缆索的第二端被附接至浮空器或者接收结构)的所述接收结构之间移动,并且用于将所述第一端附接至接收结构或浮空器,由此,所述缆索将浮空器连接至接收结构。
7.申请人继续进行研究,目的是提出这样一种系统,即,该系统仍旨在有助于浮空器接近接收结构,并且使其能够比当前条件下更容易且更安全地进行存放,同时简化了先前提出的解决方案。
技术实现要素:
8.本发明的特定目的是克服全部或部分上述缺点。
9.根据本发明的第一方面,提出了一种将浮空器固定至接收结构的系统,该系统包括:
10.‑
系拴缆索,该系拴缆索被设置为通过该系拴缆索的两端中的一端附接至浮空器,
11.‑
桅杆,该桅杆被设置为可旋转地安装在接收结构上,该桅杆包括卷筒绞盘,该卷筒绞盘具有槽口,该槽口被设置成接收该缆索的位于系拴缆索的另一端那侧上的一部分。
12.根据本发明的第一方面,系拴缆索是通过处于该系拴缆索的另一端的重物向下加重的,并且桅杆还包括叉形导引装置,该叉形导引装置具有沿两个分叉方向延伸的两个分支。
13.有利地,系拴缆索和叉形导引装置是由导电材料制成的。该特性可使浮空器能够进行静电放电。
14.在一种可能性方面,导引装置具有俘获装置,该俘获装置将导引装置分隔成近端部和远端部),远端部包括两个分支,所述俘获装置被设置成防止加重缆索的存在于近端部中的部分到达远端部。该特征具有防止缆索意外脱离的作用。该导引装置还可以被设置成
控制俘获装置,以使该俘获装置具有解锁位置,在该解锁位置中,缆索不再被俘获。
15.优选地,根据本发明的系统可以在俘获装置的水平面处包括具有检测轴线的缆索通道检测器。以这种方式,可以将线缆节段的位置约束在桅杆侧的子节段中。
16.作为示例,桅杆也可以具有处于导向装置与卷筒绞盘之间的系拴缆索捕获(catching)装置。
17.该桅杆还提供有:系拴缆索可以显示沿着系拴缆索写下的距离数据,并且桅杆装配有针对此类距离数据的读取器。
18.根据本发明的系统可以有利地包括马达,该马达用于使卷筒绞盘旋转;以及控制器,该控制器被配置成根据读取器读取的数据来驱动马达。
19.根据本发明的第二方面,提出了一种成套工具,该成套工具包括:
20.‑
系拴缆索,该系拴缆索被设置为通过该系拴缆索的两端中的一端附接至浮空器,
21.‑
桅杆,该桅杆被设置为可旋转地安装在接收结构上,该桅杆包括卷筒绞盘,该卷筒绞盘具有槽口,该槽口被设置成接收缆索的位于系拴缆索的另一端那侧上的一部分。
22.系拴缆索是通过处于该系拴缆索的另一端的重物向下加重的,并且桅杆还包括叉形导引装置,该叉形导引装置具有沿两个分叉方向延伸的两个分支。
23.当然,桅杆可以具有与本发明的第一方面相关的上述改进中的一个或更多个。
24.根据本发明的第三方面,提出了一种在根据本发明的第一方面的系统或者其改进中的一项或更多项中实现的用于将浮空器固定至接收结构的方法,在释放由浮空器加重的固定缆索之后,所述方法包括以下步骤:
25.‑
通过系统的具有两个分支的叉形导引装置导引系拴缆索,
26.‑
使系拴缆索置于具有槽口的卷筒绞盘中,以用于卷绕该缆索,以及
27.‑
使卷筒绞盘旋转。
28.根据本发明的又一方面,提供了一种可从通信网络下载和/或存储在计算机可读和/或微处理器可执行的介质上并且可加载到计算单元的内部存储器中的计算机程序产品,该计算机程序产品包括程序代码指令,该程序代码指令当由计算单元执行时,实现根据本发明的第三方面或其一个或更多个改进的过程步骤。
附图说明
29.通过阅读以下决非限制性的实施方式和实现的详细描述,并且通过观察以下附图,本发明的其它优点和特征将会显现:
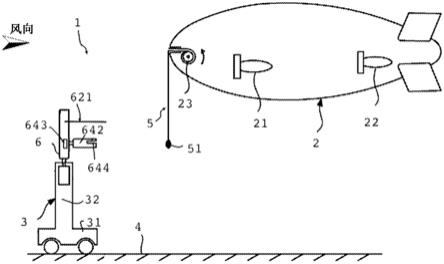
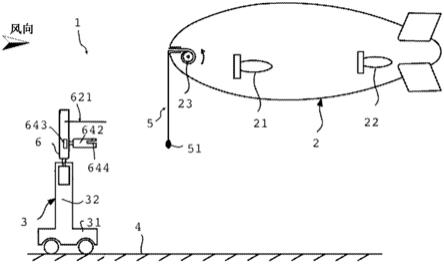
30.[图1]示意性地例示了根据本发明的系拴系统的实现的第一示例,
[0031]
[图2]是处于飞行器的下降平面的图1所示系统的桅杆的侧视图,
[0032]
[图3]是叉形导引装置处的图2所示桅杆的俯视图,
[0033]
[图4]具有处于飞行器的下降平面的、在桅杆捕捉装置的三个不同位置中的图2所示桅杆的侧向图,
[0034]
[图5]示出了处于飞行器的下降平面的、在储存装置的水平面处的图2所示桅杆的侧视图。
具体实施方式
[0035]
上述实施方式决非限制性的。因此,特别地,可以考虑本发明的变体,这些变体仅具有与所描述的其它特性分离的下述特性的选择,只要该特性的选择足以赋予技术优势或将本发明与现有技术区分开来即可。该选择包括至少一个优选的功能特性而无需结构性细节或者仅有该结构性细节的一部分,只要该部分足以赋予技术优势或将本发明与现有技术区分开来即可。
[0036]
在图中,出现在多于一个图中的要素在其出现的每一个图中均给出相同的标号。
[0037]
参照图1,根据本发明,描述了从浮空器2到接收结构3的系拴系统1的实施方式的示例。
[0038]
在所示示例中,浮空器2具有驱动单元21、22以及具有大致水平旋转轴线的卷筒23,卷筒23被设置在浮空器2的前面。
[0039]
接收结构3包括:基部31,其可能是自力推进的,停在地面或跑道4上;以及塔32,其被安装在基部31上。
[0040]
系统1包括:
[0041]
‑
系拴缆索5,该系拴缆索被设置为将其一端附接至卷筒23,将其另一端由重物51进行加重,
[0042]
‑
桅杆6,该桅杆被设置为可旋转地固定在接收结构3的竖直轴线上,并且更精确地,设置在杆塔(pylon)32上。
[0043]
在所示示例中,系拴缆索5是导电的。
[0044]
图2例示了根据本发明的桅杆6的不同功能区。
[0045]
桅杆具有:
[0046]
‑
被设置为以机械的方式连接至浮空器2的桅杆端头区61,然后是
[0047]
‑
系拴缆索5的导引区62,然后是
[0048]
‑
系拴缆索5的捕获区63,然后是
[0049]
‑
用于拉动系拴缆索5并储存其的区域64。
[0050]
这些区域按所示次序从桅杆6的顶部到底部进行排列。
[0051]
导引区62的描述
[0052]
参照图3,桅杆6在导引区62的水平面处配备有叉形导引装置621。
[0053]
该叉形导引装置621包括具有u形构造的近端部622,以及具有两个分支624和625的远端部623,所述分支中的各个分支皆从近端部的u形的竖直杆(vertical bar)的上端起沿两个分叉方向延伸。
[0054]
叉形导引装置也是导电的,以便在系拴缆索5与两个分支623和624中的一个分支相接触时可使浮空器2进行静电放电。
[0055]
叉形导引装置621、俘获装置626以及地面之间也确保导电。
[0056]
沿着飞艇朝着桅杆的轴线的移动,将系拴缆索由叉形导引装置朝着桅杆导引。
[0057]
叉形导引装置621具有将近端部622与远端部623分隔开的俘获装置626。
[0058]
叉形导引装置具有大致设置在与由两个分支624和625所形成的平面相同的平面中的两个节段,各个节段皆具有面向叉形导引装置621的近端部622的一端,并且具有被设置在与叉形导引装置621的u形的竖直端连接的分支的端部处的一端。俘获装置626的主要
目的是防止系拴缆索一进入近端部622就退出。
[0059]
当然,俘获装置626可以缩回以使系拴缆索5能够被释放。
[0060]
叉形导引装置621还在俘获装置626处具有缆索通道检测器,该缆索通道检测器被设置成在功能上将叉形导引装置的近端部622与其远端部623分隔开。
[0061]
将叉形滑轮628(根据所示示例采用空竹的形状)在叉形导引装置61的竖直u形杆之间,可旋转地安装在该竖直u形杆上。
[0062]
更一般地,叉形滑轮628的功能是将系拴缆索5从横跨近端部622的宽度的任何点驱动到所述近端部的中心。
[0063]
捕获区63的描述
[0064]
参照图4,桅杆6在捕获区63的水平面处配备有叉形导引装置631。
[0065]
在子图a中,滑轮捕获器631处于自由位置。
[0066]
在子图b中,滑轮捕获器631处于中间捕获位置。
[0067]
在子图c中,滑轮捕获器631处于最终捕获位置。
[0068]
在子图a、子图b以及子图c中的各个子图中示出了系拴缆索5的一部分。
[0069]
滑轮捕获器631具有两个滑轮,分别是一个定滑轮632和一个动滑轮633。
[0070]
定滑轮632具有垂直于飞行器2的下降平面的旋转轴线并且由臂634承载,以使该定滑轮的凹槽在飞行器的下降平面中,定位于与导引系统的槽口644对准的距离处的桅杆下风处。
[0071]
动滑轮633为空竹型。
[0072]
更一般地,动滑轮633的功能是将系拴缆索5从横跨所述动滑轮的宽度的任何点驱动到所述动滑轮的中心。
[0073]
将动滑轮633的轴可旋转地安装在臂635上。
[0074]
如子图a所示,动滑轮633可以具有被称为自由位置的第一位置,其中该动滑轮的旋转轴线处于飞行器2的下降平面中,并且优选垂直于桅杆6的纵向轴线。
[0075]
如子图b所示,动滑轮633可以具有被称为捕获位置的第二位置,其中该动滑轮的旋转轴线垂直于飞行器的下降平面中,并且优选垂直于桅杆6的纵向轴线。
[0076]
从动滑轮的自由位置移动至该动滑轮的俘获位置可使捕捉系拴缆索5。
[0077]
将臂635沿着垂直于飞行器的下降平面的旋转轴线可旋转地安装在桅杆6上。
[0078]
可以将臂635定位在中间捕获位置,优选地与桅杆6正交,并且其中,臂635垂直于桅杆6并指向下风,如子图b所示。
[0079]
可以将臂635定位在最终捕获位置,将其颈部(throat)移位至定滑轮632的背风颈部的上风处,如子图c所示。
[0080]
在该最终捕获位置,系拴缆索5先穿过动滑轮633导引,然后再穿过定滑轮632导引。
[0081]
导引区64的描述
[0082]
参照图5,桅杆6在捕获区64处配备有装置641以拉动和储存系拴缆索5。
[0083]
装置641具有卷筒绞盘642,该卷筒绞盘的轴由马达643驱动。卷筒绞盘的轴线是水平的。卷筒绞盘642具有槽口644,该槽口用于接收系拴缆索5的加重端。
[0084]
系拴缆索包含浮空器与桅杆端头区61之间的距离数据,如图5所示。
[0085]
另外,装置641具有由系拴缆索5承载的距离数据读取器645。
[0086]
读取器645读取的距离数据可以被用于控制马达643的速度。
[0087]
桅杆端头区61的描述
[0088]
桅杆端头区具有用于将桅杆6与浮空器2进行机械锁定的装置。
[0089]
桅杆端头区包括用于浮空器2的集成系统的维护连接装置。
[0090]
在本系统中实现的固定方法。
[0091]
当浮空器2正在接近接收器结构3时,飞行员开始着陆程序。
[0092]
被可旋转地安装在塔32上的桅杆端头6被定向为使得由两个分支624和625形成的角的平分线处于沿与风床相反的方向的下风向。
[0093]
鉴于飞艇的精确能力,两个分支624和625之间的长度和角度足以允许飞行员将系拴缆索5放在这两个分支之间。
[0094]
对卷筒23的展开进行控制,以释放展开的绳索并允许压舱重物51拉动绳索同时限制拉力。
[0095]
在系拴缆索5的一部分接触到叉形滑轮628之前,它切断了俘获装置626的检测轴线,并因此被控制单元(未示出)检测到。
[0096]
控制单元被配置成在检测到区域627中存在系拴缆索时开始系拴缆索捕捉过程。
[0097]
最初处于其自由位置的捕获部63(滑轮捕获器631)切换到中间捕获位置,在该中间捕获位置抓住系拴缆索,然后切换到最终捕获位置,在该最终捕获位置,系拴缆索传递穿过动滑轮,然后穿过定滑轮。
[0098]
一旦系拴缆索被正确定位在槽口644内部,带槽口的卷筒绞盘642由马达643旋转以缠绕系拴缆索5并将飞艇带到桅杆端头区61。系拴缆索5的末端可配备有止动装置,以防止在卷筒绞盘上发生滑移。
[0099]
在通过卷筒绞盘642重绕系拴缆索5的同时,叉形导引装置621的分支可以移动远离浮空器2的主体,以防止与浮空器2接触。
[0100]
在重绕结束时,浮空器2的机首被正确定位在桅杆61的头部上。然后以机械方式锁定连接。可以提供为嵌入式系统自动提供维护连接的装置。
[0101]
一旦连接被锁定,可以在浮空器2中重绕系拴缆索。
[0102]
当然,本发明不限于上述示例,并且在不脱离本发明的范围的情况下,可以对这些示例进行许多改变。而且,只要本发明的各种特性、形状、另选解决方案以及实施方式不发生冲突或互斥,它们就可以以各种组合关联在一起。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。