1.本发明属于海洋工程动力计算技术领域,具体涉及一种适用于海洋浮式结构的动力响应求解方法。
背景技术:
2.近年来,随着海上风电、海洋石油平台等海洋工程向深远海发展,对海洋浮式结构物提出了不同层面的新需求。但无论是浮式海上风机还是浮式海洋平台,从结构安全性和设备持久性考虑,都不能忽视浮式结构在复杂的随机波浪作用下的动力响应。这要求无论浮式风机还是浮式海洋平台在设计阶段或运行阶段,都需要对动力响应进行评估和预报,进而保障浮式结构物的可靠运行。
3.通常,浮式结构的动力响应可在时域和频域上求解。海洋浮式结构物在波浪中的运动具有记忆效应,在时域内通常采用延迟函数与浮体运动速度的卷积来表示记忆效应,但是求解浮式结构时域响应时卷积运算会导致计算效率低下,并且存在严重的误差累积问题;在频域内可以避免卷积运算,但通过傅里叶逆变换得时域响应时,傅里叶逆变换谐波假设等固有局限无法避免。为快速求解浮式结构时域响应,诸多学者通过快速fourier变换或laplace变换得到了频域上的动力响应方程,在频域上求解动力响应避免了复杂的卷积,但却只能得到浮式结构的稳态响应,并且在逆变换过程存在一些无法避免的问题。在动力学方程中的其他相关项,如外荷载、水动力参数等,大量学者均开展了不同深度的研究。但总体上说,现有时域法仍需要求解cummins方程中的卷积项,求解效率低下且误差累积严重,无法满足短设计周期或运行维护时动力响应快速准确预报的需求;现有频域法难以计算出瞬态响应,预报精度依赖于频率系数的选取,不利于结构设计及实际工程安全性预警。
技术实现要素:
4.为了克服现有技术的上述缺点,本发明的目的是提供一种适用于海洋浮式结构的动力响应求解方法,可以实现在具有高效率计算及预报的同时,能够保证预报的精确度。
5.本发明解决其技术问题所采用的技术方案是:
6.一种适用于海洋浮式结构的动力响应求解方法,包括以下步骤:
7.s10.建立浮式结构运动方程对应的状态空间模型,构建状态空间模型参数;
8.s20.基于浮式结构运动方程,构建传递函数及其有理分数形式,并建立状态空间模型参数与传递函数系数之间的关系;
9.s30.线性化求解有理分数形式下的传递函数系数;
10.s40.根据求解的传递函数系数,求解时域下状态空间模型参数;
11.s50.基于状态空间模型,代入求解后的状态空间模型参数,对浮式结构各自由度的动力响应进行计算及预报。
12.进一步地,步骤s10中,对浮式结构的动力响应进行时域求解,并用cummins方程表示,存在:
[0013][0014]
其中,m为质量矩阵;m
a
为附加质量矩阵;k(t)为延迟函数;c为静水恢复力系数矩阵;x(t)及f
exc
(t)分别对应浮体六自由度下的加速度、速度、位移及波浪荷载;
[0015]
然后对式(25)进行解耦,并将由k自由度外荷载所引起的i自由度动力响应用卷积的形式表示,存在:
[0016][0017]
其中,h
ik
(t)为浮式结构运动系统所对应的脉冲响应函数。
[0018]
进一步地,将式(27)转换为状态空间模型,得:
[0019][0020]
其中,为脉冲响应函数h
ik
(t)的状态空间模型参数。
[0021]
进一步地,步骤s20中,对式(29)进行laplace变换,并令s=jω,得到传递函数的频域表达式:
[0022]
h(jω
l
)=[
‑
ω
l2
[m a(ω
l
)] jω
l
b(ω
l
) c]
‑1ꢀꢀꢀꢀꢀꢀꢀ
(30)
[0023]
其中,ω
l
为离散的波浪频率序列,l=1,2,...,n;a(ω
l
)和b(ω
l
)分别为波浪频率序列对应的频域附加质量矩阵及阻尼矩阵;h(jω
l
)为h
ik
(t)的傅里叶变换。
[0024]
而对于水动力系数矩阵,存在关系式:
[0025][0026]
其中,为式(32)中延迟函数k(t)的傅里叶变换。
[0027]
进一步地,根据式(33)和边值定理,构建式(34)的有理分数形式,得:
[0028][0029]
其中,p、q表示待求解的传递函数系数。
[0030]
进一步地,步骤s30中,采用最小二乘法对式(36)中的传递函数系数进行拟合求解,并将分子、分母分别标记为p
ik
(s,θ
ik
)和q
ik
(s,θ
ik
),得需求解拟合的系数向量:
[0031][0032]
进一步地,采用迭代方法并增加权重系数对式(38)进行求解,得:
[0033][0034]
其中,s
ik,l,l
‑1为权重系数,存在l为迭代次数,在迭代的第一步,由于q
ik
(s,θ
ik,l
‑1)未知,将s
ik,l,0
设为1;当θ
′
ik,l
≈θ
′
ik,l
‑1时,迭代结束。
[0035]
进一步地,步骤s40中,基于式(40),将浮式结构的响应及波浪激励分别作为系统的输出和输入,并结合式(5)中的状态变量z(t),可以得到荷载
‑
位移传递函数:
[0036][0037]
其中,z(s)为状态变量z(t)的laplace变换。
[0038]
进一步地,对式(42)进行laplace逆变换,并分别令进一步地,对式(42)进行laplace逆变换,并分别令可得到式(5)的状态转换表达式:
[0039][0040]
和
[0041][0042]
将式(20)和式(21)代入到式(5)中,可得到各空间状态模型参数的表达式:
[0043][0044]
进一步地,步骤s50中,依据浮式结构各自由度的相应特性,存在动力响应计算式:
[0045][0046]
其中,i为自由度的取值,i=1,2,
…
,6。
[0047]
与现有技术相比,本发明的有益效果包括有:
[0048]
1、本发明巧妙地构建浮式结构运动系统的状态空间模型,将现有包含多项输出(如位移、速度和加速度)的复杂动力学方程转变为简单的荷载
‑
位移方程,减少了未知量的同时避免了对时域下卷积项的复杂求解,使得物理含义更为清晰,求解过程更为简单。
[0049]
2、本发明在laplace域下构建浮式结构传递函数的有理分数形式,并根据laplace域的边值定理确定有理分数形式下分子与分母的相对阶次,解决了有理分数形式中系数求解时阶次不确定的问题,提高了拟合求解的精度。
[0050]
3、本发明将频域有理分数形式的传递函数进行了线性化处理,同时设置有与迭代次数相关的权重系数s
ik,l,l
‑1,一方面避免了最小二乘问题中的非线性情况,提高计算效率;另一方面采用迭代计算,提高了各项系数的预估精度。
[0051]
4、本发明通过laplace逆变换,建立了频域传递函数与时域状态空间模型之间的相互关系,并借用等价换元思想得到了状态空间模型参数,从而避开了对卷积项的求解,并将各自由度响应分解为不同自由度下荷载
‑
位移形式,实现了浮式结构动力响应的快速计
算及预报。
附图说明
[0052]
为了更清楚地说明本发明实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0053]
图1为δt=0.1s时本发明与时域积分法结果对比图。
[0054]
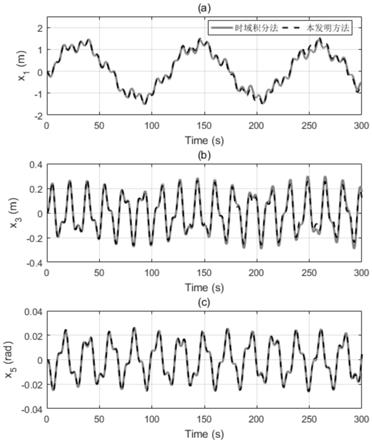
图2为δt=0.0215s时本发明与时域积分法结果对比图。
[0055]
图3为本发明与时域积分法计算效率对比图。
具体实施方式
[0056]
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行详细描述。需要说明的是,在不冲突的情况下,本技术的实施方式及实施方式中的特征可以相互组合。在下面的描述中阐述了很多具体细节以便于充分理解本发明,所描述的实施方式仅仅是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
[0057]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。
[0058]
实施例1
[0059]
如图1
‑
3所示,本实施例中提供一种适用于海洋浮式结构的动力响应求解方法,以浮式风机数值模型为计算对象为例,此时需考虑系泊引起的刚度矩阵,主要包括以下步骤:
[0060]
s10.建立浮式结构的动力学方程的状态空间模型,构建状态空间模型参数。
[0061]
此步骤中,先对现有的浮式结构的动力响应进行时域求解,并用cummins方程表示,存在:
[0062][0063]
其中,m为质量矩阵;m
a
为附加质量矩阵;k(t)为延迟函数;c为静水恢复力系数矩阵;x(t)及f
exc
(t)分别对应浮体六自由度下的加速度、速度、位移及波浪荷载。
[0064]
然后对式(48)进行解耦,并将由k自由度外荷载所引起的i自由度动力响应用卷积的形式表示,存在:
[0065][0066]
其中,h
ik
(t)为浮式结构运动系统所对应的脉冲响应函数。
[0067]
进一步地,为了避免对式(50)中卷积项的求解,提高计算效率,将式(51)转换为状态空间模型,即:
[0068][0069]
其中,为脉冲响应函数h
ik
(t)的状态空间模型参数。
[0070]
s20.基于浮式结构运动方程,构建传递函数及其有理分数形式,并建立状态空间模型参数与传递函数系数之间的关系。
[0071]
此步骤中,先对式(53)进行laplace变换,并令s=jω,得到浮式结构系统的传递函数的频域表达式:
[0072]
h(jω
l
)=[
‑
ω
l2
[m a(ω
l
)] jω
l
b(ω
l
) c]
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(54)
[0073]
其中,ω
l
为离散的波浪频率序列,l=1,2,...,n;a(ω
l
)和b(ω
l
)分别为波浪频率序列对应的频域附加质量矩阵及阻尼矩阵;而h(jω
l
)实际上即为h
ik
(t)的傅里叶变换。
[0074]
而对于水动力系数矩阵,存在关系式:
[0075][0076]
其中,为式(56)中延迟函数k(t)的傅里叶变换。
[0077]
进一步地,由于式(57)中的离散传递函数为一系列二维矩阵,各元素随时间变化可以采用有理分数形式进行表示;根据式(58)和边值定理,可以确定构建的有理分数形式中分母有理分式的次数比分子有理分式的次数高2,从而浮式结构系统的传递函数对应的有理分式为:
[0078][0079]
其中,p、q表示待求解的传递函数系数。
[0080]
s30.线性化求解有理分数形式下的传递函数系数。
[0081]
此步骤中,采用最小二乘法对式(60)中的传递函数系数进行求解,并将分子、分母分别标记为p
ik
(s,θ
ik
)和q
ik
(s,θ
ik
),得需求解拟合的系数向量:
[0082][0083]
进一步地,采用迭代方法并增加权重系数对式(62)进行求解,添加权重系数可以将非线性最小二乘问题转化为线性问题,而采用迭代方法可以有效避免权重系数在高频时产生较大的误差而导致计算精度不高;得对式(63)的求解式:
[0084][0085]
其中,s
ik,l,l
‑1为权重系数,存在l为迭代次数,在迭代的第一步,由于q
ik
(s,θ
ik,l
‑1)未知,将s
ik,l,0
设为1;当θ
′
ik,l
≈θ
′
ik,l
‑1时,迭代结束;此时即可求得各项传递函数系数。
[0086]
s40.根据求解的传递函数系数,求解时域下状态空间模型参数。
[0087]
此步骤中,基于式(65),将浮式结构的响应及波浪激励分别作为系统的输出和输入,并结合式(5)中的状态变量z(t),可以得到荷载
‑
位移传递函数:
[0088][0089]
其中,z(s)为状态变量z(t)的laplace变换。
[0090]
进一步地,对式(67)进行laplace逆变换,即可得到时域下的荷载与位移,为求解式(5)中系数,分别令可得到式(5)的状态转换表达式:
[0091][0092]
和
[0093][0094]
此时将式(20)和式(21)代入到式(5)中,可得到各空间状态模型参数的表达式:
[0095][0096]
s50.基于状态空间模型,代入求解后的状态空间模型参数,对浮式结构各自由度的动力响应进行计算及预报。
[0097]
此步骤中,对于浮式结构物,状态空间模型方程表征外荷载与位移响应之间的关系,对于第i自由度的响应,其由所有自由度的外荷载对i自由度的贡献累加而成;因此依据浮式结构各自由度的相应特性,存在动力响应计算式:
[0098][0099]
其中,i为自由度的取值,i=1,2,
…
,6。而速度和加速度响应可以通过对式(22)进行求导得到。至此,可实现时域下六自由度浮式结构动力响应的精确、快速计算及预报。
[0100]
为验证本发明方法的计算精度,本实施例中采用不同的时间步长的计算结果来对比验证,如图1所示,此时设置时间步长δt=0.1s,可见采用现有时域积分法进行计算所得到的结果与采用本发明方法进行计算所的到的结果的拟合度一般;而当时间步长δt减小至0.0215s时,可以发现两者结果完全重合,如图2所示,且该结果与δt=0.1s时采用本发明方法进行计算所得的结果一致,表明了本发明方法计算响应的精确不依赖于计算的时间步长,具有更好的精度。
[0101]
此外,为说明本发明方法计算效率问题,本实施例中控制计算机属性、语言编制软件及时间步长等变量,仅改变响应计算时长来观察计算机cpu计算所采用的时间,对比结果
如图3所示。可以看出,本发明方法有别于现有技术上采用逐步迭代计算的时程分析法,在不同的分析时长条件下均可实现动力响应的快速预报,证明了本发明方法的高效率性。
[0102]
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,故凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。