1.本发明涉及制样设备技术领域,具体是一种智能制样机器人工作站。
背景技术:
2.煤炭是远古植物遗骸埋在地层下并经过地壳隔绝空气的压力和温度条件下作用而产生的碳化化石矿物,主要被人类开采用作燃料,煤炭对于现代化工业来说,无论是重工业还是轻工业,无论是能源工业、冶金工业、化学工业、机械工业,还是轻纺工业、食品工业、交通运输业,都发挥着重要的作用,各种工业部门都在一定程度上要消耗一定量的煤炭;
3.在煤炭行业中,通常需要对开采的煤炭进行采样制样,而在煤炭制样过程中,一般需要通过人工操作的方式去制样,包括需要人工对样品进行摊平,然后将人工摊平的样品放入烘干箱内烘干,之后再将烘干后的样品取出并使用研磨机对样品进行研磨,以及对研磨后的样品进行二分操作,操作复杂,智能化程度低,制样效率和制样效果不佳,难以实现多批次连续制样;
4.针对上述的技术缺陷,现提出一种解决方案。
技术实现要素:
5.本发明的目的在于提供一种智能制样机器人工作站,通过制样机器人实现上下料、搬运,能够有效防止煤样交叉污染,实现多批次连续制样,提高制样效率,摊平工作站对样品进行摊平,干燥工作站对样品进行干燥,研磨工作站对样品进行研磨成粉样,二分工作站将粉样均质二分,装瓶工作站将存查样装瓶称重,clims系统对样品加密写码进样品瓶,样品封装单元对存查样进行封装,不需人工进行制样,操作简单,智能化程度高,显著提高了制样效率和制样效果,解决了目前在进行煤炭制样时,操作复杂,智能化程度低,制样效率和制样效果不佳,难以实现多批次连续制样。
6.为实现上述目的,本发明提供如下技术方案:
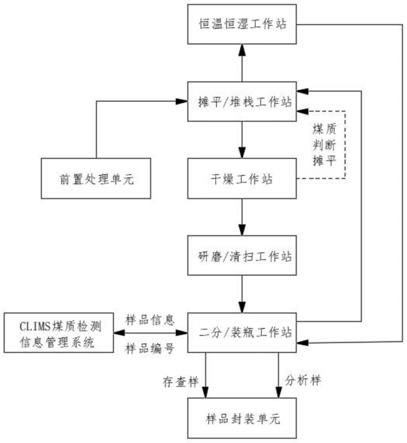
7.一种智能制样机器人工作站,包括制样机器人、摊平堆栈工作站、干燥工作站、研磨清扫工作站、二分装瓶工作站和恒温恒湿工作站,所述摊平堆栈工作站、干燥工作站、研磨清扫工作站、二分装瓶工作站、恒温恒湿工作站围绕制样机器人呈环形分布;
8.所述摊平堆栈工作站包括摊平工作站和堆栈工作站,摊平工作站用于样品烘干前摊平、样品恒温恒湿前的摊平,堆栈工作站位于摊平工作站的下方并用于存放样品盘;所述干燥工作站用于对样品进行干燥,且干燥工作站包括上、下两个干燥箱体;所述研磨清扫工作站包括研磨工作站和清扫工作站,研磨工作站对样品进行研磨,清扫工作站位于研磨工作站下方并用于清扫样品盘、样品杯;
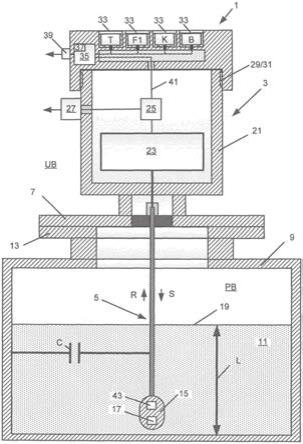
9.所述二分装瓶工作站包括二分工作站和装瓶工作站,二分工作站用于实现物料均质二分,装瓶工作站用于对二分后的样品进行装瓶;所述恒温恒湿工作站包括密闭箱体,且密闭箱体的内部安装有多个温度传感器、湿度传感器、加热器,密闭箱体的外壁设置有多个环境温度传感器和环境湿度传感器。
10.进一步的,所述摊平工作站包括摊平箱、活动板、托盘、稳固托盘组件、第一滑动块、第一导杆、第二弹簧、拉绳、转动轴、第一电机、收卷轮和导向轮;所述摊平箱内横向设置有多组第一导杆,所述活动板的底部通过螺栓固定安装有多组第一滑动块,且第一滑动块与第一导杆滑动连接,所述第一导杆的外周面套有第二弹簧,且第二弹簧横向设置并连接第一滑动块和摊平箱的内壁;
11.所述托盘的底部压住活动板,所述稳固托盘组件固定住托盘,所述第一电机通过电机座固定安装在摊平箱的外壁,所述第一电机的输出端安装有转动轴,且转动轴上安装有收卷轮,所述摊平箱的内壁安装有多组导向轮,所述拉绳的一端与活动板连接,所述拉绳的另一端穿过各组导向轮并与收卷轮连接。
12.进一步的,所述稳固托盘组件包括卡杆、连接块、连接杆、限位腔、限位铁块、第一弹簧和电磁铁,所述活动板的顶部开设有固定槽,所述托盘的底部位于固定槽内,所述活动板的内部两侧开设有限位腔,且限位腔内安装有电磁铁和限位铁块;
13.所述连接杆安装在限位铁块上,且连接杆向外穿出限位腔并与连接块连接,所述连接杆的外周面套有第一弹簧,且第一弹簧位于限位腔内并与限位铁块连接,所述连接块远离连接杆的一端与卡杆连接,所述托盘的两侧开设有卡槽,且卡杆的另一端插入卡槽内。
14.进一步的,所述摊平箱内通过轴承转动安装有螺杆,所述螺杆和转动轴上均固定安装有皮带轮,两组皮带轮通过传动带传动,所述摊平箱的顶部内壁滑动安装有螺套,且螺套与螺杆螺纹连接,所述螺套的底部安装有升降杆,所述升降杆的底部安装有摊平板,且摊平板位于托盘的正上方。
15.进一步的,所述研磨工作站包括研磨箱、进料槽、研磨辊、研磨层和第一滤网,所述研磨箱的顶部开设有漏斗状的进料槽,所述研磨箱上安装有降温气体输入组件,所述研磨辊的数目为两组并安装于研磨箱内,且进料槽的出料口位于两组研磨辊之间,所述研磨箱内通过螺栓固定安装有第一滤网,所述第一滤网位于研磨辊的下方,且研磨辊的外周面设置有研磨层。
16.进一步的,所述研磨箱内安装有固定盒,所述固定盒通过固定杆与研磨箱固定连接,所述固定盒的顶部通过螺栓固定安装有研磨头,所述固定盒内通过电机座固定安装有第二电机,所述第二电机的输出端安装有输出轴,刮板安装在输出轴上并与第一滤网的上表面接触,且刮板上安装有尖齿。
17.进一步的,所述降温气体输入组件包括除湿箱、制冷箱、输送管、鼓气管、输气管、输水管、水泵、回水管、水流通道、连接腔和气体通道,所述研磨箱上通过螺栓固定安装有除湿箱和制冷箱,所述除湿箱上安装有鼓气管和输气管,所述制冷箱上安装有输水管和回水管,且输水管上安装有水泵;
18.所述输送管安装在研磨箱上,所述输送管的两端开设有连接腔,且一组连接腔与输气管连通,另一组连接腔与研磨箱连通,两组所述连接腔通过气体通道连通,所述输送管内开设有水流通道,所述输水管的另一端与水流通道连通,所述回水管的另一端与水流通道连通,所述气体通道的数目为多组并围绕水流通道呈环形阵列分布。
19.进一步的,所述研磨箱内开设有排气腔,所述研磨箱上安装有与排气腔连通的负压管,所述排气腔内通过螺栓固定安装有第二滤网,且第一滤网和第二滤网上分别安装有第一振动器。
20.进一步的,所述二分工作站包括固定箱、二分箱、下料斗、二分器、接料器、第三电机、转盘、推拉杆、第二导杆、第二滑动块和第二振动器,所述固定箱内安装有两组第二导杆,所述二分箱的侧壁上安装有两组第二滑动块,且第二滑动块与第二导杆滑动连接,所述二分箱的侧壁上安装有第二振动器;
21.所述二分箱内安装有二分器,所述二分箱的顶部通过螺栓固定安装有下料斗,所述二分箱的底部通过螺栓固定安装有两组接料器,所述固定箱内通过电机座固定安装有第三电机,所述第三电机的输出端安装有转盘,所述推拉杆的一端通过铰接座与二分箱的侧壁铰接,所述推拉杆的另一端通过销轴与转盘的边缘处连接。
22.与现有技术相比,本发明的有益效果是:
23.1、本发明中,通过制样机器人实现上下料、搬运,能够有效防止煤样交叉污染,实现多批次连续制样,提高制样效率,摊平工作站对样品进行摊平,干燥工作站对样品进行干燥,研磨工作站对样品进行研磨成粉样,二分工作站将粉样均质二分,装瓶工作站将存查样装瓶称重,clims系统对样品加密写码进样品瓶,样品封装单元对存查样进行封装,不需人工进行制样,操作简单,智能化程度高,显著提高了制样效率和制样效果;
24.2、本发明中,通过第一电机带动转动轴进行正转和反转,收卷轮随着转动轴的正、反转而进行收绳和放绳,在拉绳和第二弹簧的共同作用下以使活动板进行左右往复振动,从而使堆积在托盘内的样品逐渐震平摊开,实现摊平操作,省去了人工摊平工序,自动化程度较高,适用的摊平样品范围广,加快了摊平工作的效率,提升了摊平效果;
25.3、本发明中,通过传动带带动螺杆进行转动,螺套随之进行纵向运动,摊平板随螺套进行纵向运动,能够辅助将托盘内的样品摊平,进一步提高了摊平效果和摊平效率;
26.4、本发明中,通过设置稳固托盘组件,实现对托盘的固定,有效防止摊平过程中托盘产生滑移或翻倒,摊平过程较为稳定,且方便对托盘进行固定和松开,有助于使用;
27.5、本发明中,通过两组研磨辊进行转动以对样品进行研磨,第一滤网对研磨后的样品进行过筛处理,以筛除不符合粒径要求的样品颗粒,各组刮板进行转动并将堆积在第一滤网上的样品颗粒摊开,不仅有助于提高样品过筛处理的效率,而且随着尖齿的不断碰撞,有助于将较大颗粒的样品粉碎,提高研磨处理操作的效果;
28.6、本发明中,通过设置降温气体输入组件,以向研磨箱内输入降温干燥气体,以对研磨部件进行降温,不仅能够避免因研磨造成研磨部件温度的不断升高而影响其使用寿命,还能够避免因温度的不断升高而带来的安全隐患;
29.7、本发明中,通过第三电机使转盘进行圆周转动,推拉杆随着转盘的转动而不断地推、拉二分箱,二分箱进行水平方向往复运动,能够对样品进行均质二分,提高了操作效率和操作效果。
附图说明
30.为了便于本领域技术人员理解,下面结合附图对本发明做进一步的说明;
31.图1为本发明的结构框图;
32.图2为本发明的工作流程框图;
33.图3为本发明中摊平工作站的主视示意图;
34.图4为本发明中摊平工作站的俯视示意图;
35.图5为摊平工作站中托盘稳固组件的结构示意图;
36.图6为摊平工作站中活动板的仰视图;
37.图7为本发明中研磨工作站的主视示意图;
38.图8为图7中a部分的放大图;
39.图9为研磨工作站中输出轴和刮板的俯视示意图;
40.图10为本发明中降温气体输入组件的结构示意图;
41.图11为降温气体输入组件中输送管的主视示意图;
42.图12为降温气体输入组件中输送管的侧视图;
43.图13为本发明中二分工作站的主视示意图;
44.图14为本发明中二分工作站的侧视示意图(不包括固定箱)。
45.附图标记:1、制样机器人;2、摊平堆栈工作站;3、干燥工作站;4、研磨清扫工作站;5、二分装瓶工作站;6、恒温恒湿工作站;7、降温气体输入组件;201、摊平箱;202、活动板;203、托盘;2031、卡槽;204、稳固托盘组件;2041、卡杆;2042、连接块;2043、连接杆;2044、限位腔;2045、限位铁块;2046、第一弹簧;2047、电磁铁;2048、固定槽;205、第一滑动块;206、第一导杆;207、第二弹簧;208、拉绳;209、转动轴;210、第一电机;211、收卷轮;212、导向轮;213、传动带;214、皮带轮;215、螺杆;216、摊平板;217、螺套;218、升降杆;401、研磨箱;402、进料槽;403、研磨辊;404、研磨层;405、固定盒;406、研磨头;407、固定杆;408、第二电机;409、输出轴;410、刮板;4101、尖齿;411、第一滤网;412、第一振动器;413、负压管;414、排气腔;415、第二滤网;501、固定箱;502、二分箱;503、下料斗;504、二分器;505、接料器;506、第三电机;507、转盘;508、推拉杆;509、第二导杆;510、第二滑动块;511、第二振动器;701、除湿箱;702、制冷箱;703、输送管;704、鼓气管;705、输气管;706、输水管;707、水泵;708、回水管;709、水流通道;710、连接腔;711、气体通道。
具体实施方式
46.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
47.实施例一:
48.如图1
‑
14所示,本发明提出的一种智能制样机器人工作站,包括制样机器人1、摊平堆栈工作站2、干燥工作站3、研磨清扫工作站4、二分装瓶工作站5和恒温恒湿工作站6,摊平堆栈工作站2、干燥工作站3、研磨清扫工作站4、二分装瓶工作站5、恒温恒湿工作站6围绕制样机器人1呈环形分布;
49.制样机器人1为六轴垂直多关节机器人,最大负载60kg,满足制样最大负载使用要求及后续机器人智能制样系统升级的要求,最大工作半径2.5米,到达距离2.05米,重复定位精度
±
0.05mm,重复路线精度0.12mm,防护等级ip67,由于采用机器人实现上下料、搬运,能够有效防止煤样交叉污染,实现多批次连续制样,提高制样效率,机器人定位精度高,能够适应恶劣的工作环境,稳定可靠,系统开放,适用多种应用开发,具有双通道回路检测、急停和安全功能,并具备全自动、手动操作模式,摊平堆栈工作站2包括摊平工作站和堆栈工
作站,摊平工作站用于样品烘干前摊平、样品恒温恒湿前的摊平,堆栈工作站位于摊平工作站的下方并用于存放样品盘,且具备扩展功能,以满足更大样品量的处理要求;
50.摊平工作站包括摊平箱201、活动板202、托盘203、第一滑动块205、第一导杆206、第二弹簧207、拉绳208、转动轴209、第一电机210、收卷轮211和导向轮212;摊平箱201内横向设置有多组第一导杆206,活动板202的底部通过螺栓固定安装有多组第一滑动块205,且第一滑动块205与第一导杆206滑动连接,第一导杆206对第一滑动块205起到导向作用,第一滑动块205可以沿着第一导杆206进行滑动,第一导杆206的外周面套有第二弹簧207,且第二弹簧207横向设置并连接第一滑动块205和摊平箱201的内壁;托盘203安装在活动板202的顶部,托盘203采用具有不沾黏特性的材质制备而成,以防样品粘附在托盘203上,第一电机210通过电机座固定安装在摊平箱201的外壁,第一电机210的输出端安装有转动轴209,第一电机210用于驱动转动轴209,且转动轴209上安装有收卷轮211,转动轴209带动收卷轮211进行转动,摊平箱201的内壁安装有多组导向轮212,拉绳208的一端与活动板202连接,拉绳208的另一端穿过各组导向轮212并与收卷轮211连接,导向轮212对拉绳208进行导向;在进行摊平操作时,第一电机210带动转动轴209进行正转和反转,收卷轮211随着转动轴209的正、反转而进行收绳和放绳,当进行收绳时,拉绳208拉动活动板202向右运动并使第二弹簧207处于不断拉伸状态,当进行放绳时,第二弹簧207复位并拉动活动板202向左运动(代表方向的左、右请参考说明书附图3),如此循环往复,以实现活动板202的左右往复振动,从而使堆积在托盘203内的样品逐渐震平摊开,实现摊平操作,省去了人工摊平工序,自动化程度较高,适用的摊平样品范围广,加快了摊平工作的效率,提升了摊平效果;
51.干燥工作站3用于对样品进行干燥,干燥工作站3采用智能烘干技术,根据不同煤样和水分特征,优化调整烘干箱参数,使样品的烘干温度和时间满足要求,样品不会由于温度过高而变质,且具备自动恒温和超温报警功能,干燥工作站3包括上、下两个干燥箱体,减少了不同箱体开关门对温度的影响,回温速度快,不同水分样品的干燥时间可智能调整;研磨清扫工作站4包括研磨工作站和清扫工作站,研磨工作站对样品进行研磨,清扫工作站位于研磨工作站下方并用于清扫样品盘、样品杯;二分装瓶工作站5包括二分工作站和装瓶工作站,二分工作站用于实现物料均质二分,装瓶工作站用于对二分后的样品进行装瓶;恒温恒湿工作站6包括密闭箱体,且密闭箱体的内部安装有多个温度传感器、湿度传感器、加热器,密闭箱体的外壁设置有多个环境温度传感器和环境湿度传感器,通过传感器实时测定密闭箱体内以及密闭箱体外环境的温度和湿度变化,进而控制内部加热器和通风系统调节功率和方向,使得密闭箱体内温度和湿度始终保持在预设值范围内;
52.研磨工作站包括研磨箱401、进料槽402、研磨辊403、研磨层404和第一滤网411,研磨箱401的顶部开设有漏斗状的进料槽402,研磨辊403的数目为两组并安装于研磨箱401内,两组研磨辊403的转动方向相反,且进料槽402的出料口位于两组研磨辊403之间的正上方,研磨箱401内通过螺栓固定安装有第一滤网411,第一滤网411位于研磨辊403的下方,第一滤网411对研磨后的样品进行过筛处理,以筛除不符合粒径要求的样品颗粒,且研磨辊403的外周面设置有研磨层404,研磨时,进料槽402内的样品向下落入两组研磨辊403之间,两组研磨辊403进行转动并对样品进行研磨;研磨箱401内安装有固定盒405,固定盒405通过固定杆407与研磨箱401固定连接,固定盒405的顶部通过螺栓固定安装有研磨头406,固定盒405内通过电机座固定安装有第二电机408,第二电机408的输出端安装有输出轴409,
第二电机408用于驱动输出轴409,刮板410安装在输出轴409上并与第一滤网411的上表面接触,且刮板410上安装有尖齿4101,在进行研磨时,第二电机408使输出轴409进行转动,输出轴409带动各组刮板410随之进行转动,刮板410将堆积在第一滤网411上的样品颗粒摊开,对过筛处理起到辅助作用,不仅有助于提高样品过筛处理的效率,而且随着尖齿4101的不断碰撞,有助于将较大颗粒的样品粉碎,提高研磨处理操作的效果;
53.二分工作站包括固定箱501、二分箱502、下料斗503、二分器504、接料器505、第三电机506、转盘507、推拉杆508、第二导杆509、第二滑动块510和第二振动器511,固定箱501内安装有两组第二导杆509,二分箱502的侧壁上安装有两组第二滑动块510,且第二滑动块510与第二导杆509滑动连接,第二导杆509对第二滑动块510进行导向,第二滑动块510可以沿着第二导杆509进行滑动;二分箱502内安装有二分器504,二分箱502的顶部通过螺栓固定安装有下料斗503,二分箱502的底部通过螺栓固定安装有两组接料器505,固定箱501内通过电机座固定安装有第三电机506,第三电机506的输出端安装有转盘507,第三电机506用于驱动转盘507,推拉杆508的一端通过铰接座与二分箱502的侧壁铰接,推拉杆508的另一端通过销轴与转盘507的边缘处连接,在进行二分操作时,样品通过下料斗503落下,第三电机506使转盘507进行圆周转动,推拉杆508随着转盘507的转动而不断地推、拉二分箱502,从而使二分箱502进行水平方向往复运动,二分器504对落下的样品进行二分,两组接料器505对二分后的样品进行输出,能够对样品进行均质二分,提高了操作效率和操作效果,二分箱502的侧壁上安装有第二振动器511,第二振动器511使二分器504进行振动,有助于将附着的样品颗粒震落下来。
54.该智能制样机器人工作站的使用方法如下:
55.步骤一、经过前置处理单元处理的3mm来样进入机器人工作站,制样机器人1将样品放入摊平堆栈工作站2内,摊平工作站对样品进行摊平;
56.步骤二、摊平后的样品由制样机器人1送入干燥工作站3内进行干燥,干燥温度设定为40℃,控温精度
±
1℃;
57.在进行干燥时,根据煤质检测的结果,制样机器人1将样品从干燥工作站3取出并放入摊平堆栈工作站2内进行二次摊平,二次摊平后再次进行干燥;
58.步骤三、制样机器人1将干燥后的样品放入研磨清扫工作站4,研磨工作站将样品研磨成粉样,粉样粒径<0.2mm;
59.步骤四、制样机器人1将研磨后的粉样放入二分装瓶工作站5,二分工作站将粉样一分为二,其中一份为存查样,另一份为分析样;
60.步骤五、装瓶工作站将存查样装瓶称重,并将样品信息传输进入clims系统,经clims系统(clims系统为煤质检测信息管理系统)加密写码进样品瓶,存查样进入样品封装单元,样品封装单元对存查样进行封装;
61.步骤六、制样机器人1将分析样放入摊平堆栈工作站2,摊平工作站对分析样进行摊平;
62.步骤七、制样机器人1将摊平后的分析样放入恒温恒湿工作站6,分析样稳定后,制样机器人1将分析样放入二分装瓶工作站5;
63.步骤八、装瓶工作站将分析样装瓶称重,并将样品信息传输进入clims系统,经clims系统加密写码进样品瓶,分析样进入样品封装单元,样品封装单元对分析样进行封
装。
64.实施例二:
65.如图3和图5所示,本实施例与实施例1的区别在于,稳固托盘组件204固定住托盘203,稳固托盘组件204包括卡杆2041、连接块2042、连接杆2043、限位腔2044、限位铁块2045、第一弹簧2046和电磁铁2047,活动板202的顶部开设有固定槽2048,托盘203的底部位于固定槽2048内,固定槽2048对托盘203进行初步固定,活动板202的内部两侧开设有限位腔2044,且限位腔2044内安装有电磁铁2047和限位铁块2045,限位铁块2045与活动板202滑动连接,限位腔2044对限位铁块2045进行限位;连接块2042竖直设置,连接杆2043横向设置并安装在限位铁块2045上,且连接杆2043的另一端向外穿出限位腔2044并与连接块2042的底部连接;
66.连接杆2043的外周面套有第一弹簧2046,且第一弹簧2046位于限位腔2044内并与限位铁块2045连接,连接块2042远离连接杆2043的一端与卡杆2041连接,托盘203的两侧开设有卡槽2031,且卡杆2041的另一端插入卡槽2031内,当将托盘203放置在活动板202上后,卡杆2041对准卡槽2031,对电磁铁2047通电,电磁铁2047产生磁吸力,限位铁块2045受到磁吸力的作用而朝电磁铁2047的方向运动,直至电磁铁2047吸附住限位铁块2045,在限位铁块2045的运动过程中,通过连接杆2043、连接块2042拉动卡杆2041进行运动,最终卡杆2041插入卡槽2031中,实现对托盘203的固定,有效防止摊平过程中托盘产生滑移或翻倒,摊平过程较为稳定,且方便对托盘203进行固定和松开,有助于使用。
67.实施例三:
68.如图3和图4所示,本实施例与实施例1、实施例2的区别在于,摊平箱201内通过轴承转动安装有螺杆215,螺杆215纵向设置,螺杆215和转动轴209上均固定安装有皮带轮214,两组皮带轮214通过传动带213传动,转动轴209在转动时通过传动带213和两组皮带轮214带动螺杆215进行转动,摊平箱201的顶部内壁滑动安装有螺套217,且螺套217与螺杆215螺纹连接,在螺杆215进行转动时,螺套217进行纵向运动,螺套217的底部安装有升降杆218,升降杆218的底部安装有摊平板216,且摊平板216位于托盘203的正上方,摊平板216的底部安装有多组摊平齿,摊平板216随螺套217进行纵向运动,能够辅助将托盘203内的样品摊平,提高摊平效果和摊平效率;升降杆218为电动伸缩杆,能够进行伸长或缩短,方便对摊平板216的高度进行调节,有助于使用。
69.实施例四:
70.如图10
‑
12所示,本实施例与实施例1、实施例2、实施例3的区别在于,研磨箱401上安装有降温气体输入组件7,降温气体输入组件7包括除湿箱701、制冷箱702、输送管703、鼓气管704、输气管705、输水管706、水泵707、回水管708、水流通道709、连接腔710和气体通道711,研磨箱401上通过螺栓固定安装有除湿箱701和制冷箱702,除湿箱701上安装有鼓气管704和输气管705,鼓气管704将空气输送入除湿箱701内,除湿箱701对进入的空气进行除湿干燥,制冷箱702上安装有输水管706和回水管708,且输水管706上安装有水泵707,制冷箱702对水溶液进行制冷以使其成为冷却水,水泵707通过输水管706将制冷箱702内的冷却水抽出;
71.输送管703安装在研磨箱401上,输送管703的两端开设有连接腔710,且一组连接腔710与输气管705连通,输气管705将除湿后的空气输送入该连接腔710内,另一组连接腔
710与研磨箱401连通,两组连接腔710通过气体通道711连通,空气均匀进入各组气体通道711中并聚集于另一组连接腔710内,输送管703内开设有水流通道709,输水管706的另一端与水流通道709连通,输水管706将冷却水输送至水流通道709内,冷却水对各组气体通道711内的空气进行降温,以实现对空气的均匀降温,降温效率和降温效果较佳,降温后的空气进入研磨箱401内,以吸收研磨过程中产生的热量,不仅能够避免因研磨造成研磨部件温度的不断升高而影响其使用寿命,还能够避免因温度的不断升高而带来的安全隐患,比如煤炭样品因温度不断升高而发生自燃,回水管708的另一端与水流通道709连通,回水管708将水流通道709内的水溶液回流至制冷箱702中,以实现水溶液的循环,节约水资源,气体通道711的数目为多组并围绕水流通道709呈环形阵列分布;
72.研磨箱401内开设有排气腔414,研磨箱401上安装有与排气腔414连通的负压管413,排气腔414内通过螺栓固定安装有第二滤网415,负压管413将排气腔414内的空气抽出,不仅实现研磨箱401内气体的输出,还能够有效防止内部气体从两组研磨辊403之间向上输出而影响原料的正常研磨,第二滤网415对研磨箱401内的气体进行过滤,以滤除其中的样品颗粒,且第一滤网411和第二滤网415上分别安装有第一振动器412,第一振动器412使第一滤网411和第二滤网415进行振动,以有效防止样品颗粒堵塞滤孔。
73.本发明的工作过程及原理如下:
74.使用时,制样机器人1将前置处理单元的样品放入摊平堆栈工作站2内,摊平工作站对样品进行摊平,摊平后的样品由制样机器人1送入干燥工作站3内进行干燥,在进行干燥时,还需要根据煤质检测的结果和干燥要求,通过制样机器人将样品从干燥工作站取出并放入摊平堆栈工作站内进行二次摊平,二次摊平后再次进行干燥,以提高干燥效果;制样机器人1将干燥后的样品放入研磨清扫工作站4,研磨工作站将样品研磨成粉样,研磨后的粉样放入二分装瓶工作站5,二分工作站将粉样一分为二,其中一份为存查样,另一份为分析样;
75.装瓶工作站将存查样装瓶称重,并将样品信息传输进入clims系统,经clims系统加密写码进样品瓶,样品封装单元对存查样进行封装,制样机器人1将分析样放入摊平堆栈工作站2,摊平工作站对分析样进行摊平,摊平后的分析样放入恒温恒湿工作站6,分析样稳定后,再将分析样放入二分装瓶工作站5,装瓶工作站将分析样装瓶称重,并将样品信息传输进入clims系统,经clims系统加密写码进样品瓶,样品封装单元对分析样进行封装;
76.其中,摊平操作如下:将样品放入托盘203内,活动板202上的稳固托盘组件204对托盘203进行固定,启动第一电机210,第一电机210带动转动轴209进行正转和反转,收卷轮211随着转动轴209的正、反转而进行收绳和放绳,当进行收绳时,拉绳208拉动活动板202向右运动并使第二弹簧207处于不断拉伸状态,当进行放绳时,第二弹簧207复位并拉动活动板202向左运动,如此循环往复,以实现活动板202的左右往复振动,从而使堆积在托盘203内的样品逐渐震平摊开,实现摊平操作,省去了人工摊平工序,自动化程度较高,适用的摊平样品范围广,加快了摊平工作的效率,提升了摊平效果;
77.研磨操作如下:样品进入进料槽402内,进料槽402内的样品向下落入两组研磨辊403之间,两组研磨辊403进行转动并对样品进行研磨,第一滤网411对研磨后的样品进行过筛处理,以筛除不符合粒径要求的样品颗粒,第二电机408使输出轴409进行转动,输出轴409带动各组刮板410随之进行转动,刮板410将堆积在第一滤网411上的样品颗粒摊开,不
仅有助于提高样品过筛处理的效率,而且随着尖齿4101的不断碰撞,有助于将较大颗粒的样品粉碎,提高研磨处理操作的效果;研磨过程中,降温气体输入组件7向研磨箱401内输入降温干燥气体,以对研磨部件进行降温,不仅能够避免因研磨造成研磨部件温度的不断升高而影响其使用寿命,还能够避免因温度的不断升高而带来的安全隐患;
78.二分操作如下:样品通过下料斗503落下,启动第三电机506,第三电机506使转盘507进行圆周转动,推拉杆508随着转盘507的转动而不断地推、拉二分箱502,从而使二分箱502进行水平方向往复运动,二分器504对落下的样品进行二分,两组接料器505对二分后的样品进行输出,能够对样品进行均质二分,提高了操作效率和操作效果。
79.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
80.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。