技术特征:
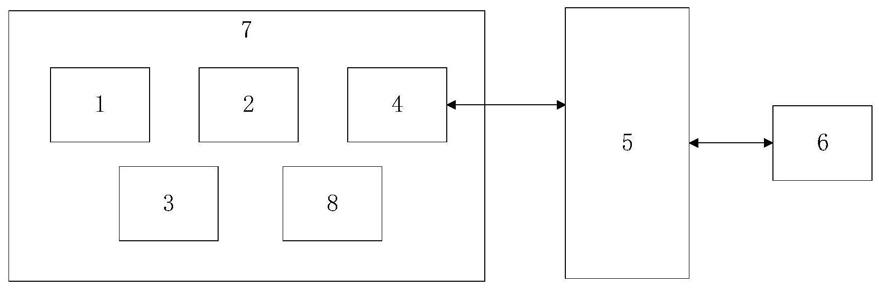
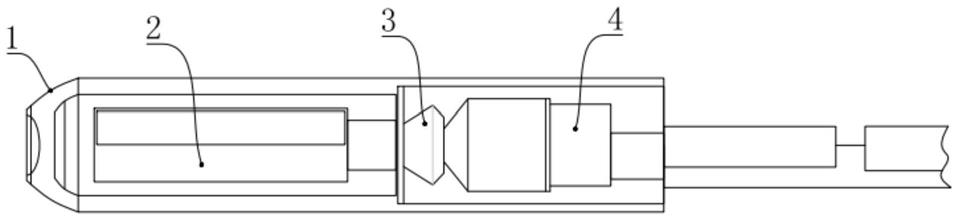
1.一种关节康复运动监测管理系统,其特征在于:包括关节活动度采集模块(1)、肌肉张紧度采集模块(2)、运动状态监测模块(3)、无线传输模块(4)、服务器(5)、智能终端(6)和装置本体(7);所述关节活动度采集模块(1):用于采集用户关节活动度数据;所述肌肉张紧度采集模块(2):用于采集用户肌肉张紧度数据;所述运动状态监测模块(3):用于采集用户运动时间数据和运动频率数据;所述无线传输模块(4):用于动度采集模块(1)、肌肉张紧度采集模块(2)、运动状态监测模块(3)与服务器(5)之间的数据传输;所述服务器(5):用于对采集到的关节活动度数据、肌肉张紧度数据、运动时间数据和运动频率数据进行分析处理,输出用户康复运动的结果,并将各项数据和结果传输至智能终端(6),以及接收智能终端(6)的控制指令;所述智能终端(6):用于接收并显示服务器(5)采集的数据和输出的结果,以及向服务器(5)发送用户的控制指令;所述装置本体(7):用于承载关节活动度采集模块(1)、肌肉张紧度采集模块(2)、运动状态监测模块(3)、无线传输模块(4),紧贴于用户康复关节处。2.根据权利要求1所述的一种关节康复运动监测管理系统,其特征在于:所述装置本体(7)上设置有蜂鸣器(8),所述蜂鸣器(8)与服务器(5)电连接,智能终端(6)通过发送报警控制指令,通过服务器(5)启动蜂鸣器(8)。3.根据权利要求2所述的一种关节康复运动监测管理系统,其特征在于:所述服务器(5)包括关节活动度数据预处理模块(51)、肌肉张紧度数据预处理模块(52)、关节活动度数据运算模块(53)、肌肉张紧度数据运算模块(54)、运动状态运算模块(55)、运动状态分析模块(56)、用户指令控制模块(57):所述关节活动度数据预处理模块(51)和肌肉张紧度数据预处理模块(52)分别用于对关节活动度原始数据、肌肉张紧度原始数据进行预处理;所述关节活动度数据运算模块(53)和肌肉张紧度数据运算模块(54)分别用于对关节活动度数据、肌肉张紧度数据进行计算,并得出关节活动度数据、肌肉张紧度数据的计算结果;所述运动状态运算模块(55)用于根据运动时间原始数据和运动频率原始数据,计算运动时间数据和运动频率数据的计算结果;运动状态分析模块(56)用于判断并输出用户康复运动的结果;所述用户指令控制模块(57)用于接收智能终端(6)发送的用户控制指令,以及将用户康复运动的结果发送至智能终端(6)。4.根据权利要求1~3中任意一项所述的一种关节康复运动监测管理系统的使用方法,其特征在于:其包括以下步骤:步骤1:用户康复运动时采集用户的关节活动度数据、肌肉张紧度数据、运动时间数据和运动频率数据;步骤2:对关节活动度数据、肌肉张紧度数据进行预处理并运算;步骤3:根据运动时间数据和运动频率数据,将关节活动度数据、肌肉张紧度数据与标准数据进行比对,并输出用户康复运动的结果;步骤4:根据输出的用户康复运动结果,提出康复运动建议。5.根据权利要求4所述的一种关节康复运动监测管理系统的使用方法,其特征在于:所
述关节活动度数据包括关节运动角度数据和关节运动加速度数据,所述关节运动角度数据的采集方法为:所述关节活动度采集模块(1)通过固定在关节肢体近心端和远心端的两组六轴加速度传感器获取三维角度信息,通过关节活动度数据预处理模块(51)进行原始数据预处理,由关节活动度数据运算模块(53)计算得到关节运动角度数据;所述关节运动加速度数据的采集方法为:所述关节活动度采集模块(1)通过固定在关节肢体近心端和远心端的两组六轴加速度传感器获取原始陀螺仪信息,通过关节活动度数据预处理模块(51)进行原始数据预处理,由关节活动度数据运算模块(53)计算得到关节运动加速度数据。6.根据权利要求5所述的一种关节康复运动监测管理系统的使用方法,其特征在于:所述肌肉张紧度数据的采集方法为:所述关节活动度采集模块(1)通过固定在关节附近穴位的柔性薄膜压力传感器获取多个体表部位的体表压力原始数据,通过肌肉张紧度数据预处理模块(52)进行原始数据预处理,由肌肉张紧度数据运算模块(54)计算得到肌肉张紧度数据。7.根据权利要求5所述的一种关节康复运动监测管理系统的使用方法,其特征在于:所述运动时间数据和运动频率数据的采集方法为:所述运动状态监测模块(3)通过固定在关节肢体近心端和远心端的两组六轴加速度传感器获取静止时加速度原始数据,通过运动状态运算模块(55)计算获得运动时间数据和运动频率数据。8.根据权利要求6或7所述的一种关节康复运动监测管理系统的使用方法,其特征在于:所述步骤3中标准数据获取方法为:通过在用户康复侧相对的健康侧关节处,或健康用户相同关节处同步采集用户的关节活动度数据、肌肉张紧度数据、运动时间数据和运动频率数据,并通过预处理、运算后获得标准数据。9.根据权利要求8所述的一种关节康复运动监测管理系统的使用方法,其特征在于:所述步骤3中标准数据的比对方法为:步骤3.1:判断康复运动时运动时间数据、运动频率数据与标准数据差值百分比是否小于10%,如是进入步骤3.1,如否则重新进入步骤1;步骤3.2:分别计算康复运动时关节活动度数据、肌肉张紧度数据与标准数据差值百分比,取各数据中差值百分比的绝对值最大值:如果绝对值最大值小于5%,则输出用户康复运动的结果为良;如果绝对值最大值大于5%小于10%,则输出用户康复运动的结果为中;如果绝对值最大值大于10%,则输出用户康复运动的结果为差;所述步骤3中,所述康复运动的建议为:如果用户康复运动的结果为良,则建议保持康复运动强度;如果用户康复运动的结果为中,则建议减轻康复运动的强度;如果用户康复运动的结果为差,则发出报警控制指令,并立即停止康复运动。10.根据权利要求9所述的一种关节康复运动监测管理系统的使用方法,其特征在于:所述关节运动角度数据的原始数据预处理和计算方法具体为:提取每个单独的六轴加速度传感器的原始角度信息rolll、rollh、pitchl、pitchh、
yawl、yawh六个整型数据字段,并计算浮点表示的旋转角数据:roll=((rollh<<8)|rolll)/32768*180pitch=((pitchh<<8)|pitchl)/32768*180yaw=((yawh<<8)|yawl)/32768*180式中:roll表示传感器的滚转,rolll表示数据roll的低字节、rollh表示数据roll的高字节,pitch表示传感器的俯仰,pitchl表示数据pitch的低字节、pitchh表示数据pitch的高字节,yaw表示传感器的偏航角度,yawl表示数据yaw的低字节、yawh表示数据yaw的高字节,“<<”为左移运算,“|”为按位或运算,“/”“*”分别表示除法、乘法运算;由上述数据进一步计算得到三维坐标:x=
‑
sin(yaw)*cos(roll)y=cos(yaw)*cos(roll)z=sin(roll)向量v=(x,y,z),近心端、远心端的六轴加速度传感器处理得到向量v分别记为α、β;由向量夹角计算公式计算:cos<α,β>=α
·
β/|α|
·
|β|<α,β>=arc cos(α
·
β/|α|
·
|β|)计算得到夹角ω=<α,β>,即为所求的关节运动角度数据;所述关节运动加速度数据原始数据预处理和计算方法具体为:提取六轴加速度传感器中三轴陀螺仪单个轴向的数据:d
pitch
=((d
pitchh
<<8)|d
pitchl
)/32768*180式中:d
pitch
为使用浮点数表示的y轴向的角加速度,d
pitchl
表示数据d
pitch
的低字节、d
pitchh
表示数据d
pitch
的高字节;加速度的合成为线性相加:d
a
=d
pitch1
d
pitch2
其中,d
pitch1
、d
pitch2
分别为近心端、远心端处理得到的d
pitch
值,d
a
即为关节运动加速度数据。
技术总结
本发明公开了一种关节康复运动监测管理系统,其系统包括关节活动度采集模块、肌肉张紧度采集模块、运动状态监测模块、无线传输模块、服务器、智能终端和装置本体。本发明的优点在于,通过六轴加速度传感器对用户康复关节的康复运动进行监测,可获取关节运动角度数据、关节运动加速度数据、运动时间数据、运动频率数据;通过柔性薄膜压力传感器附于用户肌肉上方,利用肌肉收缩时体表压力变化,监测用户康复关节的康复运动时肌肉张紧度数据,通过分析处理,输出用户康复运动的结果,从而评价康复运动的模式和强度是否合理以及肌肉协调性情况进行评估,及时康复介入避免造成永久的功能障碍和关节二次损伤。障碍和关节二次损伤。障碍和关节二次损伤。
技术研发人员:江燕 毛靖 王江 宋恩民 闻均
受保护的技术使用者:华中科技大学
技术研发日:2021.07.15
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。