1.本发明涉及医疗人工智能技术领域,具体地指一种关节康复运动监测管理系统及使用方法。
背景技术:
2.肘关节、膝关节等四肢关节是人体解剖中复杂的多轴向运动关节,随着社会老龄化、全民健身运动的热潮,越来越多的关节疾病出现,因此,用户康复运动的方法越来越引起重视。目前,有许多关节手术成功的用户,由于康复介入不及时或方式不当而造成永久的功能障碍,甚至导致关节二次损伤。虽然市场上有较多关于关节康复指导的设备,但均存在操作不便、数据无可视化记录、无运动指导功能等缺陷。
3.因此,亟需设计一种具有远程管理、指导关节康复运动的监测管理系统,加强医患“双向沟通”,为用户提供个性化运动处方。
技术实现要素:
4.针对现有技术中的技术问题,本发明提出了一种关节康复运动监测管理系统及使用方法,通过对各项采集数据的分析处理,输出用户康复运动的结果,从而评价康复运动的模式和强度是否合理以及肌肉协调性情况进行评估,及时康复介入避免造成永久的功能障碍和关节二次损伤
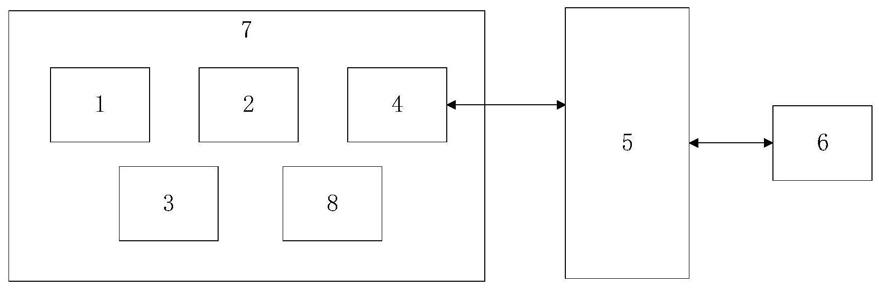
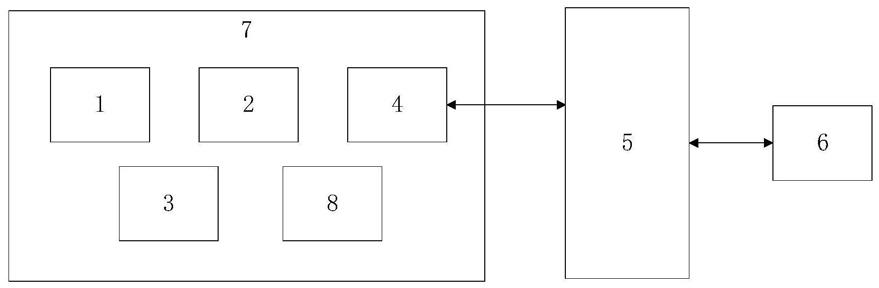
5.本发明提出的一种关节康复运动监测管理系统,包括关节活动度采集模块、肌肉张紧度采集模块、运动状态监测模块、无线传输模块、服务器、智能终端和装置本体;所述关节活动度采集模块:用于采集用户关节活动度数据;所述肌肉张紧度采集模块:用于采集用户肌肉张紧度数据;所述运动状态监测模块:用于采集用户运动时间数据和运动频率数据;所述无线传输模块:用于动度采集模块、肌肉张紧度采集模块、运动状态监测模块与服务器之间的数据传输;所述服务器:用于对采集到的关节活动度数据、肌肉张紧度数据、运动时间数据和运动频率数据进行分析处理,输出用户康复运动的结果,并将各项数据和结果传输至智能终端,以及接收智能终端的控制指令;所述智能终端:用于接收并显示服务器采集的数据和输出的结果,以及向服务器发送用户的控制指令;所述装置本体:用于承载关节活动度采集模块、肌肉张紧度采集模块、运动状态监测模块、无线传输模块,紧贴于用户康复关节处。
6.进一步地,所述装置本体上设置有蜂鸣器,所述蜂鸣器与服务器电连接,智能终端通过发送报警控制指令,通过服务器启动蜂鸣器。
7.更进一步地,所述服务器包括关节活动度数据预处理模块、肌肉张紧度数据预处理模块、关节活动度数据运算模块、肌肉张紧度数据运算模块、运动状态运算模块、运动状态分析模块、用户指令控制模块:
8.所述关节活动度数据预处理模块和肌肉张紧度数据预处理模块分别用于对关节活动度原始数据、肌肉张紧度原始数据进行预处理;所述关节活动度数据运算模块和肌肉
张紧度数据运算模块分别用于对关节活动度数据、肌肉张紧度数据进行计算,并得出关节活动度数据、肌肉张紧度数据的计算结果;所述运动状态运算模块用于根据运动时间原始数据和运动频率原始数据,计算运动时间数据和运动频率数据的计算结果;运动状态分析模块用于判断并输出用户康复运动的结果;所述用户指令控制模块用于接收智能终端发送的用户控制指令,以及将用户康复运动的结果发送至智能终端。
9.一种关节康复运动监测管理系统的使用方法,包括以下步骤:
10.步骤1:用户康复运动时采集用户的关节活动度数据、肌肉张紧度数据、运动时间数据和运动频率数据;
11.步骤2:对关节活动度数据、肌肉张紧度数据进行预处理并运算;
12.步骤3:根据运动时间数据和运动频率数据,将关节活动度数据、肌肉张紧度数据与标准数据进行比对,并输出用户康复运动的结果;
13.步骤4:根据输出的用户康复运动结果,提出康复运动建议。
14.进一步地,所述关节活动度数据包括关节运动角度数据和关节运动加速度数据,
15.所述关节运动角度数据的采集方法为:所述关节活动度采集模块通过固定在关节肢体近心端和远心端的两组六轴加速度传感器获取三维角度信息,通过关节活动度数据预处理模块进行原始数据预处理,由关节活动度数据运算模块计算得到关节运动角度数据;
16.所述关节运动加速度数据的采集方法为:所述关节活动度采集模块通过固定在关节肢体近心端和远心端的两组六轴加速度传感器获取原始陀螺仪信息,通过关节活动度数据预处理模块进行原始数据预处理,由关节活动度数据运算模块计算得到关节运动加速度数据。
17.更进一步地,所述肌肉张紧度数据的采集方法为:所述关节活动度采集模块通过固定在关节附近穴位的柔性薄膜压力传感器获取多个体表部位的体表压力原始数据,通过肌肉张紧度数据预处理模块进行原始数据预处理,由肌肉张紧度数据运算模块计算得到肌肉张紧度数据。
18.进一步地,所述运动时间数据和运动频率数据的采集方法为:所述运动状态监测模块通过固定在关节肢体近心端和远心端的两组六轴加速度传感器获取静止时加速度原始数据,通过运动状态运算模块计算获得运动时间数据和运动频率数据。
19.作为优选项,所述步骤3中标准数据获取方法为:
20.通过在用户康复侧相对的健康侧关节处,或健康用户相同关节处同步采集用户的关节活动度数据、肌肉张紧度数据、运动时间数据和运动频率数据,并通过预处理、运算后获得标准数据。
21.作为优选项,所述步骤3中标准数据的比对方法为:
22.步骤3.1:判断康复运动时运动时间数据、运动频率数据与标准数据差值百分比是否小于10%,如是进入步骤3.1,如否则重新进入步骤1;
23.步骤3.2:分别计算康复运动时关节活动度数据、肌肉张紧度数据与标准数据差值百分比,取各数据中差值百分比的绝对值最大值:
24.如果绝对值最大值小于5%,则输出用户康复运动的结果为良;
25.如果绝对值最大值大于5%小于10%,则输出用户康复运动的结果为中;
26.如果绝对值最大值大于10%,则输出用户康复运动的结果为差;
27.所述步骤3中,所述康复运动的建议为:
28.如果用户康复运动的结果为良,则建议保持康复运动强度;
29.如果用户康复运动的结果为中,则建议减轻康复运动的强度;
30.如果用户康复运动的结果为差,则发出报警控制指令,并立即停止康复运动。
31.作为优选项,所述关节运动角度数据的原始数据预处理和计算方法具体为:
32.提取每个单独的六轴加速度传感器的原始角度信息rolll、rollh、pitchl、pitchh、yawl、yawh六个整型数据字段,并计算得出浮点表示的旋转角数据:
33.roll=((rollh<<8)|rolll)/32768*180
34.pitch=((pitchh<<8)|pitchl)/32768*180
35.yaw=((yawh<<8)|yawl)/32768*180
36.式中:roll表示传感器的滚转,rolll表示数据roll的低字节、rollh表示数据roll的高字节,pitch表示传感器的俯仰,pitchl表示数据pitch的低字节、pitchh表示数据pitch的高字节,yaw表示传感器的偏航角度,yawl表示数据yaw的低字节、yawh表示数据yaw的高字节,“<<”为左移运算,“|”为按位或运算,“/”“*”分别表示除法、乘法运算;
37.由上述数据可以进一步计算得到三维坐标:
38.x=
‑
sin(yaw)*cos(roll)
39.y=cos(yaw)*cos(roll)
40.z=sin(roll)
41.向量v=(x,y,z),近心端、远心端的六轴加速度传感器处理得到向量v分别记为α、β;
42.则由向量夹角计算公式可以计算:
43.cos<α,β>=α
·
β/|α|
·
|β|
44.<α,β>=arc cos(α
·
β/|α|
·
|β|)
45.由此可以计算得到夹角ω=<α,β>,即为所求的关节运动角度数据;
46.所述关节运动加速度数据原始数据预处理和计算方法具体为:
47.提取六轴加速度传感器中三轴陀螺仪单个轴向的数据:
48.d
pitch
=((d
pitchh
<<8)|d
pitchl
)/32768*180
49.式中:d
pitch
为使用浮点数表示的y轴向的角加速度,d
pitchl
表示数据d
pitch
的低字节、d
pitchh
表示数据d
pitch
的高字节;
50.加速度的合成为线性相加:
51.d
a
=d
pitch1
d
pitch2
52.其中,d
pitch1
、d
pitch2
分别为近心端、远心端处理得到的d
pitch
值,d
a
即为关节运动加速度数据。
53.相比于传统判断方法,本发明一种关节康复运动监测管理系统及使用方法具有如下特点:
54.1、通过六轴加速度传感器对用户康复关节的康复运动进行监测,可获取关节运动角度数据、关节运动加速度数据、运动时间数据、运动频率数据;通过柔性薄膜压力传感器附于用户肌肉上方,利用肌肉收缩时体表压力变化,监测用户康复关节的康复运动时肌肉张紧度数据,通过分析处理,输出用户康复运动的结果,从而评价康复运动的模式和强度是
否合理以及肌肉协调性情况进行评估,及时康复介入避免造成永久的功能障碍和关节二次损伤;
55.2、无线传输模块可直接将数据传输到智能终端,利用虚拟显示技术,医生可客观评价用户关节的康复情况,制定个性化指导方案;
56.3、可实时监测用户康复关节的活动状态,并将各个测量数据与设定危险阈值比较,当接近或超过阈值时通过蜂鸣器发出警报,及时提醒用户停止运动;
57.4、实现数据存储,方便读取和分析,可进行大数据积累,为临床研究、治疗方案的完善提供数据支撑。
附图说明
58.图1为本发明的结构框图;
59.图2为服务器的结构框图;
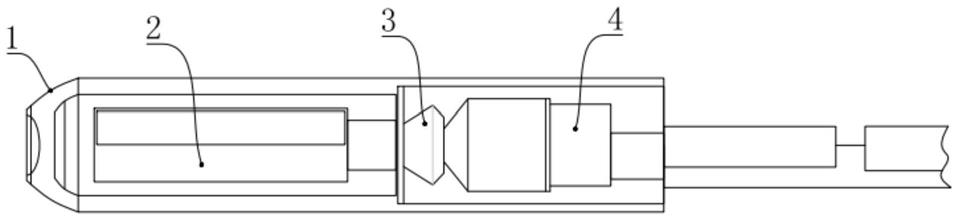
60.图3为实施例1中装置本体的结构示意图;
61.图4为图3的后视示意图;
62.图5为实施例1的系统流程示意图;
63.图6为实施例1的使用流程示意图。
64.图中:关节活动度采集模块1、肌肉张紧度采集模块2、运动状态监测模块3、无线传输模块4、服务器5(其中:关节活动度数据预处理模块51、肌肉张紧度数据预处理模块52、关节活动度数据运算模块53、肌肉张紧度数据运算模块54、运动状态运算模块55、运动状态分析模块56、用户指令控制模块57)、智能终端6、装置本体7。
具体实施方式
65.下面结合附图及实施例对本发明作进一步的详细描述,但该实施例不应理解为对本发明的限制。
66.如图1~2所示,本发明提出的一种关节康复运动监测管理系统,包括关节活动度采集模块1、肌肉张紧度采集模块2、运动状态监测模块3、无线传输模块4、服务器5、智能终端6和装置本体7;所述关节活动度采集模块1:用于采集用户关节活动度数据;述肌肉张紧度采集模块2:用于采集用户肌肉张紧度数据;所述运动状态监测模块3:用于采集用户运动时间数据和运动频率数据;所述无线传输模块4:用于动度采集模块1、肌肉张紧度采集模块2、运动状态监测模块3与服务器5之间的数据传输;所述服务器5:用于对采集到的关节活动度数据、肌肉张紧度数据、运动时间数据和运动频率数据进行分析处理,输出用户康复运动的结果,并将各项数据和结果传输至智能终端6,以及接收智能终端6的控制指令;所述智能终端6:用于接收并显示服务器5采集的数据和输出的结果,以及向服务器5发送用户的控制指令;所述装置本体7:用于承载关节活动度采集模块1、肌肉张紧度采集模块2、运动状态监测模块3、无线传输模块4,紧贴于用户康复关节处。所述装置本体7上设置有蜂鸣器8,所述蜂鸣器8与服务器5电连接,智能终端6通过发送报警控制指令,通过服务器5启动蜂鸣器8。
67.所述服务器5包括关节活动度数据预处理模块51、肌肉张紧度数据预处理模块52、关节活动度数据运算模块53、肌肉张紧度数据运算模块54、运动状态运算模块55、运动状态分析模块56、用户指令控制模块57:所述关节活动度数据预处理模块51和肌肉张紧度数据
预处理模块52分别用于对关节活动度原始数据、肌肉张紧度原始数据进行预处理;所述关节活动度数据运算模块53和肌肉张紧度数据运算模块54分别用于对关节活动度数据、肌肉张紧度数据进行计算,并得出关节活动度数据、肌肉张紧度数据的计算结果;所述运动状态运算模块55用于根据运动时间原始数据和运动频率原始数据,计算运动时间数据和运动频率数据的计算结果;运动状态分析模块56用于判断并输出用户康复运动的结果;所述用户指令控制模块57用于接收智能终端6发送的用户控制指令,以及将用户康复运动的结果发送至智能终端6。
68.一种关节康复运动监测管理系统的使用方法,包括以下步骤:
69.步骤1:用户康复运动时采集用户的关节活动度数据、肌肉张紧度数据、运动时间数据和运动频率数据;所述关节活动度数据包括关节运动角度数据和关节运动加速度数据,所述关节运动角度数据的采集方法为:所述关节活动度采集模块1通过固定在关节肢体近心端和远心端的两组六轴加速度传感器获取三维角度信息,通过关节活动度数据预处理模块51进行原始数据预处理,由关节活动度数据运算模块53计算得到关节运动角度数据;所述关节运动加速度数据的采集方法为:所述关节活动度采集模块1通过固定在关节肢体近心端和远心端的两组六轴加速度传感器获取原始陀螺仪信息,通过关节活动度数据预处理模块51进行原始数据预处理,由关节活动度数据运算模块53计算得到关节运动加速度数据。所述肌肉张紧度数据的采集方法为:所述关节活动度采集模块1通过固定在关节附近穴位的柔性薄膜压力传感器获取多个体表部位的体表压力原始数据,通过肌肉张紧度数据预处理模块52进行原始数据预处理,由肌肉张紧度数据运算模块54计算得到肌肉张紧度数据。所述运动时间数据和运动频率数据的采集方法为:所述运动状态监测模块3通过固定在关节肢体近心端和远心端的两组六轴加速度传感器获取静止时加速度原始数据,通过运动状态运算模块55计算获得运动时间数据和运动频率数据。
70.所述关节运动角度数据的原始数据预处理和计算方法具体为:
71.提取每个单独的六轴加速度传感器的原始角度信息rolll、rollh、pitchl、pitchh、yawl、yawh六个整型数据字段,并计算得出浮点表示的旋转角数据:
72.roll=((rollh<<8)|rolll)/32768*180
73.pitch=((pitchh<<8)|pitchl)/32768*180
74.yaw=((yawh<<8)|yawl)/32768*180
75.式中:roll表示传感器的滚转,rolll表示数据roll的低字节、rollh表示数据roll的高字节,pitch表示传感器的俯仰,pitchl表示数据pitch的低字节、pitchh表示数据pitch的高字节,yaw表示传感器的偏航角度,yawl表示数据yaw的低字节、yawh表示数据yaw的高字节,“<<”为左移运算,“|”为按位或运算,“/”“*”分别表示除法、乘法运算;
76.由上述数据可以进一步计算得到三维坐标:
77.x=
‑
sin(yaw)*cos(roll)
78.y=cos(yaw)*cos(roll)
79.z=sin(roll)
80.向量v=(x,y,z),近心端、远心端的六轴加速度传感器处理得到向量v分别记为α、β;
81.则由向量夹角计算公式可以计算:
82.cos<α,β>=α
·
β/|α|
·
|β|
83.<α,β>=arc cos(α
·
β/|α|
·
|β|)
84.由此可以计算得到夹角ω=<α,β>,即为所求的关节运动角度数据;
85.所述关节运动加速度数据原始数据预处理和计算方法具体为:
86.提取六轴加速度传感器中三轴陀螺仪单个轴向的数据:
87.d
pitch
=((d
pitchh
<<8)|d
pitchl
)/32768*180
88.式中:d
pitch
为使用浮点数表示的y轴向的角加速度,d
pitchl
表示数据d
pitch
的低字节、d
pitchh
表示数据d
pitch
的高字节;
89.加速度的合成为线性相加:
90.d
a
=d
pitch1
d
pitch2
91.其中,d
pitch1
、d
pitch2
分别为近心端、远心端处理得到的d
pitch
值,d
a
即为关节运动加速度数据。
92.步骤2:对关节活动度数据、肌肉张紧度数据进行预处理并运算;
93.步骤3:根据运动时间数据和运动频率数据,将关节活动度数据、肌肉张紧度数据与标准数据进行比对,并输出用户康复运动的结果;
94.标准数据获取方法为:
95.通过在用户康复侧相对的健康侧关节处,或健康用户相同关节处同步采集用户的关节活动度数据、肌肉张紧度数据、运动时间数据和运动频率数据,并通过预处理、运算后获得标准数据。
96.标准数据的比对方法为:
97.步骤3.1:判断康复运动时运动时间数据、运动频率数据与标准数据差值百分比是否小于10%,如是进入步骤3.1,如否则重新进入步骤1;
98.步骤3.2:分别计算康复运动时关节活动度数据、肌肉张紧度数据与标准数据差值百分比,取各数据中差值百分比的绝对值最大值:
99.如果绝对值最大值小于5%,则输出用户康复运动的结果为良;
100.如果绝对值最大值大于5%小于10%,则输出用户康复运动的结果为中;
101.如果绝对值最大值大于10%,则输出用户康复运动的结果为差;
102.所述步骤3中,所述康复运动的建议为:
103.如果用户康复运动的结果为良,则建议保持康复运动强度;
104.如果用户康复运动的结果为中,则建议减轻康复运动的强度;
105.如果用户康复运动的结果为差,则发出报警控制指令,并立即停止康复运动。
106.步骤4:根据输出的用户康复运动结果,提出康复运动建议。
107.本发明在实际使用时:
108.所述运动时间数据是从采样开始到当前时刻,用户关节运动幅度超过一定阈值的累计时间,其的计算方法为:
109.设定运动阈值的关节运动幅度m
thresh
,使用前通过校准测量,即静置一段时间取测得加速度的平均值,作为静止时的标准值a,计算:
110.dt=(t
n
–
t
n
‑1)/1000
111.t
n
=t
n
‑1 ε(|a
n
–
a|
‑
m
thresh
)*dt
112.其中,ε(x)为阶跃函数,t
n
表示第n次测量时传感器的采样时间,a
n
为第n次采集数据并处理得到的当前的加速度值,t
n
即为第n次测量时统计得到的运动时间数据;
113.所述运动频率数据的采集方法为:所述运动状态监测模块(3)通过固定在关节肢体近心端和远心端的两组六轴加速度传感器获取三轴加速度的原始数据axh、axl、ayh、ayl、azh、azl,通过处理可以得到三个轴向上的加速度ax、ay、az:
114.ax=((axh<<8)|axl)/32768
115.ay=((ayh<<8)|ayl)/32768
116.az=((azh<<8)|azl)/32768
117.式中:ax表示x轴向上的加速度,axl表示数据ax的低字节、axh表示数据ax的高字节,ay表示y轴向上的加速度,ayl表示数据ay的低字节、ayh表示数据ay的高字节,az表示z轴向上的加速度,azl表示数据az的低字节、azh表示数据az的高字节,“<<”为左移运算,“|”为按位或运算,“/”“*”分别表示除法、乘法运算;
118.由此可以计算出加速度值a:
[0119][0120]
以时间t为横轴,加速度a为纵轴,将每次计算得到的加速度值a与原始数据中获得的采样时间t,将一系列(t,a)绘制到该坐标系中,以折线图的形式表示,任取两个相邻的波峰,其横轴坐标为t1、t2,则运动的瞬时频率可以通过1/(t2‑
t1)近似求得;
[0121]
取一段连续的时间t,统计t时刻内波峰的数量n,则该段时间内运动的平均频率可以通过n/t求得,采用滑动窗口算法,即设当前时刻为t
now
,时间窗口为t
win
,通过上述方法,统计t
now
‑
t
win
到t
now
时间的波峰数量n,即可实时地得到最近一段时间t
win
内运动的平均频率n/t
win
。
[0122]
由关节活动角度数据加上时间数据也可以近似计算角加速度:
[0123]
dω=ω
n 1
–
ω
n
[0124]
dt=(t
n 1
‑
t
n
)/1000
[0125]
dα=dω/dt
[0126]
其中,ω
n
表示传感器连续测量中第n次测量得到的数据计算出的关节夹角,t
n
表示传感器连续测量中第n次测量原始数据中的时间戳字段。通过计算可以得到瞬时角加速度的近似值dα。
[0127]
实施例1:
[0128]
如图3~6,装置本体7的结构可以但不限于为:一种用于四肢关节康复的运动监测装置,穿戴在用户康复关节处,其包括护套,护套为圆筒结构,护套上设有定位结构,护套上还设有位置传感器和压力传感器,位置传感器有两个,两个位置传感器分别垂直设置在定位结构的正上和正下方;护套上设有定位腔,压力传感器可移动地设置在定位腔内。定位结构正中心设有通孔,通孔周围设有防滑垫,这样,使用时防滑垫与用户皮肤紧靠增大摩擦,保证定位准确。定位腔上设有多个定位孔,压力传感器上设有定位扣,定位扣设置在定位孔内,这样,选择合适的定位孔后,通过定位扣和定位孔的卡扣结构固定压力传感器。定位腔设有多个,压力传感器也设有多个,各个压力传感器分别布置在定位腔内。多个定位腔分别设置在护套的上下部,这样,使用时压力传感器可以尽量远离定位结构。护套的水平两端设
有魔术贴。使用时定位结构设置在用户关节外侧,这样,位置传感器设置在用户肢体上,用户运动时位置传感器的相对位移较大。使用时压力传感器设置在用户关节周边的穴位处。位置传感器为六轴加速度传感器,可通过获取用户肢体标志点在空间向量中的坐标,计算用户关节的活动度。压力传感器为压阻薄膜传感器,用于监测用户运动时肢体的肌肉发力情况。
[0129]
位置传感器为型号bwt61cl的六轴加速度传感器,其可以实时监控康复关节的关节运动角度数据、关节运动加速度数据、运动时间数据和运动频率数据等数据,通过装置本体7内设的无线传输模块4传输,以可视图像的形式进行展示,软件系统可根据需要安装在任何智能终端6上。
[0130]
压力传感器为型号dt4
‑
052k的压阻式柔性薄膜传感器,其可以实时监控康复关节的肌肉张紧度数据,通过护套的弹性圆筒状结构贴附于用户关节周边的穴位处,由于穴位上覆盖有肌肉,以此定位肌肉监测点更为合理,避免设置在用户骨骼上造成的压力测量失准等问题。当用户肘关节穿戴本装置时,压力传感器可以设置在肘髎、手三里、天井穴、曲池、尺泽等穴位上,如果用户患有内侧上髁痛则可选少海、曲泽等穴位;当用户膝关节穿戴本装置时,压力传感器可以设置在犊鼻、阳关、陵泉穴等穴位。压力传感器还可以在不使用时起到按摩定位的作用,方便用户自行按压,通经活络、舒筋利节。
[0131]
使用时,用户将装置本体7固定于四肢康复关节的近心端及远心端,通过关节活动度采集模块1、肌肉张紧度采集模块2、运动状态监测模块3分别采集康复关节在康复运动时的关节活动度原始数据、肌肉张紧度原始数据、运动时间原始数据和运动频率原始数据;并将各原始数据通过无线传输模块4传输至服务器5。服务器5将所接收的各原始数据与运动处方库数据进行比对,当原始数据达到该运动处方所设置的阈值时,向智能终端6发出图像、声音及震动提示,实现动作预警功能。运动处方将标准练习动作分解为可被设备监测的参数,将所测的参数与预先设置的危险动作阈值进行比较,以在应用程序界面实现精准预警。服务器5具有数据处理模块,可将运动处方库动作向智能终端6发出,利用虚拟显示画面进行展示,为用户康复运动训练提供指导。服务器5接收上传的数据,并同步至医护系统,医护人员可通过所收集数据(主要为康复训练动作达标率、持续时间、训练频率)掌握用户的康复进度,对用户进行管理。康复专业人员依据测量数据对用户康复运动情况进行评估,精准调整康复方案。
[0132]
无线传输模块4可通过蓝牙、4g、5g、wi
‑
fi等多种方式进行数据传输。
[0133]
装置本体7由包括但不局限于六轴加速度传感器、陀螺仪、压阻式柔性薄膜传感器、中空外壳、魔术贴带构成。
[0134]
智能终端6上的应用程序具有数据处理、虚拟显示、数据记录、数据同步、方案展示等多项功能。数据可视化后,通过再同步向智能终端6用户发送康复训练结果,若达到预定目标则进一步锻炼,若未达标,则在分析原因后进行康复方案的调整。
[0135]
用户佩戴并固定装置本体7后,进行康复关节的康复训练活动度训练,关节活动度数据预处理模块51、肌肉张紧度数据预处理模块52同步监测关节活动度原始数据、肌肉张紧度原始数据、运动时间原始数据和运动频率原始数据,所获得原始数据由无线传输模块4传输至服务器5分析处理,再由服务器5传输至安装于智能终端6的应用程序之中,由编制的程序转换为关节活动度、关节旋转角度、胫骨移动的加速度、肢体运动时间等指标,用以评
价康复训练计划的完成情况。计算后的指标存储于终端,并在应用程序上以数据和虚拟显示两种形式予以展示,所计算指标同时传输至控制后台,由后台的康复专业人员评估肢体功能恢复情况,并依据后台运动处方库推荐的方案为基础,经调整制定个性化的康复方案,下传并显示于用户端应用程序上。
[0136]
虚拟显示界面功能的实现方式如下:以应用程序接收的康复方案为基础,匹配相应的动作参数,所示参数以浅色虚线形式显示于用户肢体运动状态的虚拟显示界面,用户肢体运动状态以彩色动画形式展现,与可穿戴设备所监测的数据一致。当用户肢体运动轨迹与目标一致时,应用程序界面予以图像和语音提示,表示用户此次练习达标。应用程序界面上同步显示康复方案所制定的用户康复锻炼的速度和频率,任一指标达标,均给与图像和语音提示,但仅在关节活动度、康复锻炼的速度和频率同时达标的基础上,此次练习才判定为有效,用户端界面会予以图标及声音提示,同时进行计数。当计数同康复计划中次数一致时,方可结束此次训练。在用户关节活动的幅度、速度和旋转角度超过设定阈值时,应用程序会同时给予画面、声音和振动提示,提示用户动作错误,需停止练习。训练中断时,已完成训练次数将会被记录,但下次练习开始时,原有计数将会重置,之前计数将由应用程序同步至管理后台,为康复专业人员调整康复计划提供参考。单次训练结束后,应用程序界面将会视情况给予恢复肢体固定、及时进行冰敷等康复等建议。完成当日训练计划后,用户端会给予鼓励提示,同时解锁当日的康复小贴士,增加用户对康复计划的理解。
[0137]
医护端管理后台将会接受并存储用户的监测和康复数据,用户康复达标情况、训练持续时间、完成次数将会以统计图形式呈现于管理端,康复专业人员可在登录账号后进行查看,在制定下阶段康复计划时,后台会依据运动处方库,结合用户特征匹配具有参考价值的康复方案,康复人员在逐条审阅并进行调整后,可完成新康复方案的制定,还可在备注栏中注明额外的康复训练、复诊等建议,并将方案下发到用户终端上的应用程序之中,应用程序将其转化为虚拟显示图像进行显示,指导用户进行康复训练。按上述流程,可形成康复评估,目标制定,训练监测,效果评价,方案调整,再次康复训练的闭环。
[0138]
传感器的测量原理如下:通过六轴加速度传感器,获取肢体标志点在空间向量中的坐标,依据空间向量计算公式可得到关节活动度;压阻薄膜传感器则利用用户康复训练时肌肉收缩,使得附着于设备的传感器薄膜产生变形,进而产生电阻变化,将肌肉活动转化为电信号,以此判断用户肌肉发力是否正确,健患侧同时穿戴时,则可判断用户双侧肌肉发力是否一致,进而判断用户双侧肌肉协调性的情况,通过定期监测,可为评估用户康复效果提供参考依据。
[0139]
本发明依托物联网技术,可将康复关节的康复运动参数测量、传送、记录、可视化、康复方案制定及推荐等环节进行智能联动。全面记录用户个人康复情况,通过知情同意下的大数据分析与共享实现监督、管理、分析统一化,制定针对性强,可实施性佳的运动康复方案。
[0140]
本发明能有效提高运动康复过程中客观指标(如关节运动角度数据、关节运动加速度数据、肌肉张紧度数据、运动时间数据和运动频率数据)的监测准确率,避免用户因活动不当导致的二次损伤,同时医生可根据用户个人活动数据进行个性化方案的构建,也为运动康复方向大数据的积累、临床研究、治疗方案的完善提供数据支撑。
[0141]
本发明用于用户关节康复、远程管理及指导,操作简便,可以将康复关节的活动数
据记录、无线发射,还可以对康复关节进行运动数据管理,远程诊断和指导康复运动。
[0142]
尽管上面结合附图对本发明的优选实施例进行了描述,但是本发明并不局限于上述的具体实方式,上述的具体实施方式仅仅是示意性的,并不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可以作出很多形式的具体变换,这些均属于本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。