1.本实用新型涉及机械领域,尤其涉及一种用于智能机械手的辅助装置。
背景技术:
2.乒乓球、海洋球等塑料球产品是由两个塑料半球组合而成,具体的生产步骤是:首先利用模具将圆形的塑料薄片压成塑料半球,其次对塑料半球裁边修剪,然后在塑料半球的边沿涂胶,最后将两个塑料半球合并形成完整的塑料球。在现有技术中,乒乓球等塑料球的生产多数采用的是半自动化作业,压模、裁剪、涂胶等工序由机器完成,但是塑料半球在各个机器之间的转移工作则是人工完成,也就是说压膜机、裁剪机的上下料工作实际上是由人工实现的。由于塑料半球形状不规则,如果想要配置智能机械手来实现塑料半球在各个设备之间自动转移,就必须对塑料半球进行位置调整,确保输送带上的塑料半球处于统一的状态。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种辅助装置来调整输送带上的塑料半球的状态。
4.为解决上述技术问题,本实用新型采用的技术方案为:一种用于智能机械手的辅助装置,包括框架、支撑台、喷气管、喷嘴、转轴、转板、驱动器和传动机构;
5.所述框架的前后敞口,支撑台安装在框架内,支撑台用于衔接输送带,输送带上放置来自生产设备的塑料半球(例如半个乒乓球);
6.所述转轴位于支撑台的侧面,转轴上安装至少两块转板,相邻的转板之间的夹角为90
°
,驱动器通过传动机构驱动转轴旋转;
7.所述喷气管的一端与喷嘴连接,另一端连接气泵,喷嘴位于支撑台之上并且指向支撑台。
8.从生产设备落到输送带上的塑料半球具有两种状态,第一种是敞口朝下的倒扣状态,第二种是敞口朝上的状态;本实用新型辅助装置的作用是将输送带上所有的塑料半球均转化为敞口朝下的倒扣状态,方便后续机械手抓取;具体做法是:驱动器驱动转轴以及安装在转轴上的转板旋转,使得一个塑料半球被转板转移至支撑台上,支撑台上的塑料半球处于两块转板和框架内表面形成的三角空间中;然后喷嘴对塑料半球喷气,如果塑料半球处于敞口朝下的倒扣状态,这种塑料半球十分稳定,气流对其不产生影响;如果塑料半球处于敞口朝上的状态,那么塑料半球将在气流的作用下发生跳动和翻转,最终转化为敞口朝下的倒扣状态;调整完毕后,转轴和转板再次旋转,转板将调整好的塑料半球推送至下一个输送带上。
9.进一步的,所述转板的数量为四个,四个转板呈十字形安装在转轴上,这种十字形设计确保转轴每旋转90
°
就可以完成对一个塑料半球的调整。
10.进一步的,所述喷嘴倾斜,倾斜的喷嘴所产生的气流更有利于塑料半球翻转。
11.进一步的,辅助装置还包括电磁阀,所述电磁阀安装在喷气管上,电磁阀控制喷嘴间歇性喷气,间歇性喷气比持续喷气更有利于塑料半球翻转。
12.具体的,所述传动机构为齿轮组,所述驱动器为电机。
13.进一步的,所述框架的顶部设置有安装孔,所述喷嘴上设置有安装架,安装架固定在安装孔的边缘。
14.有益效果:本实用新型的用于智能机械手的辅助装置利用转板实现塑料半球的进出并且对翻转中的塑料半球限位,利用喷嘴产生的气流冲击塑料半球,气流既能促使敞口朝上的塑料半球翻面又不影响敞口朝下的塑料半球,最终实现了输送带上所有塑料半球的状态统一,有利于后续机械手抓取。
附图说明
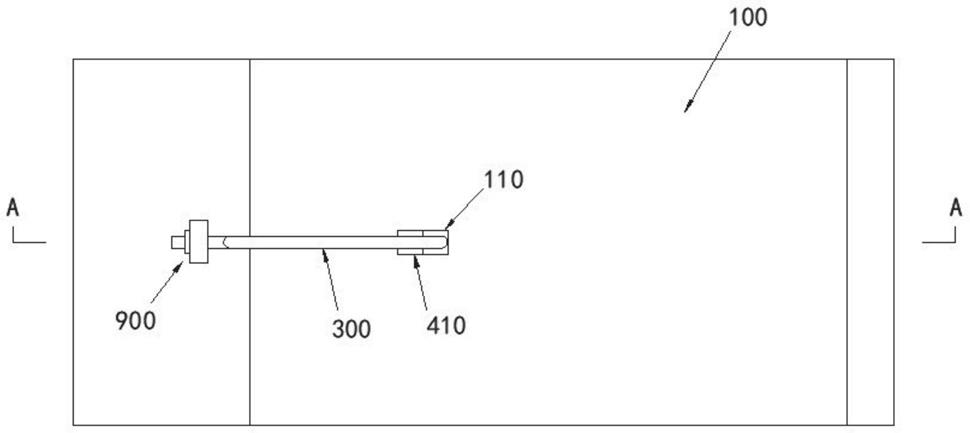
15.图1是实施例1辅助装置的俯视图。
16.图2是图1的a
‑
a剖面图。
17.图3是图2的b
‑
b剖面图。
18.图4是实施例1辅助装置的应用状态图。
19.图5是实施例1辅助装置的工作原理图。
20.其中:100、框架;110、安装孔;200、支撑台;300、喷气管;400、喷嘴;410、安装架;500、转轴;600、转板;700、电机;800、传动机构;900、电磁阀;1000、塑料半球;1100、第一输送带;1200、第二输送带。
具体实施方式
21.下面结合具体实施方式对本实用新型作进一步详细说明。
22.实施例1
23.如图1至图3所示,本实施例的用于智能机械手的辅助装置包括框架100、支撑台200、喷气管300、喷嘴400、转轴500、转板600、电机700、传动机构800和电磁阀900;
24.框架100的前后敞口,支撑台200安装在框架100内;
25.转轴500位于支撑台200的侧面,转轴500上安装四块转板600,四块转板600呈十字形;电机700通过传动机构800驱动转轴500旋转,本实施例中的传动机构800采用齿轮组;
26.喷气管300的一端与喷嘴400连接,另一端用于连接气泵,喷气管300上设置有电磁阀900;框架100的顶部设置有安装孔110,喷嘴400上设置有安装架410,安装架410固定在安装孔110的边缘,喷嘴400位于支撑台200之上并且倾斜的指向支撑台200;为了方便理解,本实施例在图2和图3中的支撑台200上已经放置了敞口朝上的塑料半球1000,喷嘴400同时也倾斜的指向塑料半球1000。
27.本实施例辅助装置的作用是将输送带上所有的塑料半球1000均转化为敞口朝下的倒扣状态,方便后续机械手抓取;下面以图4和图5为例来说明本实施例辅助装置的工作原理:
28.(1)辅助装置放置在第一输送带1100和第二输送带1200之间,本实施例中的支撑台200与第一输送带1100和第二输送带1200对齐且等高;第二输送带1200用于输送来自生产设备的塑料半球1000,从生产设备落到输送带上的塑料半球1000具有两种状态,第一种
是敞口朝下的倒扣状态,第二种是敞口朝上的状态(图2中塑料半球1000的状态);
29.(2)如图5所示,转轴500每旋转90
°
就可以将一个塑料半球1000从第二输送带1200转移至支撑台200上,支撑台200上的塑料半球1000处于两块转板600和框架100内表面形成的三角空间中;
30.(3)如图2所示,当塑料半球1000处于支撑台200上时,喷嘴400对塑料半球1000喷气,如果塑料半球1000处于敞口朝上的状态,那么塑料半球1000将在气流的作用下发生跳动和翻转,最终转化为敞口朝下的倒扣状态;如果塑料半球1000处于敞口朝下的倒扣状态,这种塑料半球1000十分稳定,气流对其不产生影响;
31.(4)转轴500旋转90
°
,转板600将支撑台200上的塑料半球1000推送至第一输送带1100,第一输送带1100将经过调整的统一敞口朝下的塑料半球1000输送至抓取位,供后续的机械手抓取。
32.虽然说明书中对本实用新型的实施方式进行了说明,但这些实施方式只是作为提示,不应限定本实用新型的保护范围。在不脱离本实用新型宗旨的范围内进行各种省略、置换和变更均应包含在本实用新型的保护范围内。
技术特征:
1.一种用于智能机械手的辅助装置,其特征在于:包括框架(100)、支撑台(200)、喷气管(300)、喷嘴(400)、转轴(500)、转板(600)、驱动器和传动机构(800);所述框架(100)的前后敞口,支撑台(200)安装在框架(100)内,支撑台(200)用于衔接输送带;所述转轴(500)位于支撑台(200)的侧面,转轴(500)上安装至少两块转板(600),相邻的转板(600)之间的夹角为90
°
,驱动器通过传动机构(800)驱动转轴(500)旋转;所述喷气管(300)的一端与喷嘴(400)连接,另一端连接气泵,喷嘴(400)位于支撑台(200)之上并且指向支撑台(200)。2.根据权利要求1所述的用于智能机械手的辅助装置,其特征在于:所述转板(600)的数量为四个,四个转板(600)呈十字形安装在转轴(500)上。3.根据权利要求1所述的用于智能机械手的辅助装置,其特征在于:所述喷嘴(400)倾斜。4.根据权利要求1所述的用于智能机械手的辅助装置,其特征在于:还包括电磁阀(900),所述电磁阀(900)安装在喷气管(300)上,电磁阀(900)控制喷嘴(400)间歇性喷气。5.根据权利要求1所述的用于智能机械手的辅助装置,其特征在于:所述传动机构(800)为齿轮组。6.根据权利要求1所述的用于智能机械手的辅助装置,其特征在于:所述驱动器为电机(700)。7.根据权利要求1所述的用于智能机械手的辅助装置,其特征在于:所述框架(100)的顶部设置有安装孔(110),所述喷嘴(400)上设置有安装架(410),安装架(410)固定在安装孔(110)的边缘。
技术总结
本实用新型公开了一种用于智能机械手的辅助装置,包括框架、支撑台、喷气管、喷嘴、转轴、转板、驱动器和传动机构;框架的前后敞口,支撑台安装在框架内,支撑台用于衔接输送带;转轴位于支撑台的侧面,转轴上安装至少两块转板,相邻的转板之间的夹角为90
技术研发人员:瞿向前 黄志亮 郭小辉 李亚飞 曹利其 陶瑞辰
受保护的技术使用者:湖南城市学院
技术研发日:2021.06.07
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。