1.本公开涉及一种用于车辆的警告系统,其在归因于恶劣天气(例如,大雨、雪)和/或环境条件(例如,雾、日出和/或日落)的恶劣气象能见度条件期间向驾驶员提供警告。
背景技术:
2.车辆对一切(vehicle
‑
to
‑
everything)(v2x)通信是将信息从车辆传输到可能影响车辆的任何实体的过程,并且反之亦然。v2x包括若干类型的通信,诸如但不限于v2i(车辆对基础设施)、v2n(车辆对网络)、v2v(车辆对车辆)、v2p(车辆对行人)、v2d(车辆对设备)和v2g(车辆对网格)。v2x虑及导致道路安全、交通效率和节能的其他实体与车辆之间的通信。
3.目前,车辆支持的v2v应用基于可配置的时间对碰撞(time
‑
to
‑
collision)阈值向车辆的驾驶员提供警告。该阈值是通过用户体验、反应时间和车辆能力(例如,制动距离)预定义和开发的。在一些示例中,对于车辆而言如下内容是期望的:包括早期警告系统,该系统在v2v应用被配置为例如在归因于恶劣天气(例如,大雨、雪)和/或环境条件(例如,雾、日出和/或日落)的恶劣气象能见度条件期间提供警告之前在另一辆车正在接近车辆时警告驾驶员。因此,驾驶员将在v2v应用被配置为提供警告信号的时间之前的时间处接收警告信号。
技术实现要素:
4.本公开的一个方面提供了一种向第一车辆的驾驶员提供第二不可见车辆正在接近的早期警告消息的方法。该方法包括在由第一车辆支持的数据处理硬件处从通信系统接收通信信号。该方法包括在数据处理硬件处基于通信信号确定警告消息。该方法还包括从数据处理硬件向由第一车辆支持并与数据处理硬件通信的用户接口传输指令以在第一时间处向驾驶员提供警告消息。该方法还包括在数据处理硬件处从由第一车辆支持的一个或多个车辆系统接收车辆系统数据。该方法还包括由数据处理硬件基于车辆系统数据确定周围状态。该方法包括从数据处理硬件向用户接口传输指令以在周围状态低于预定阈值时在第一时间之前的第二时间处向驾驶员提供警告消息。
5.本公开的实现可以包括以下可选特征中的一个或多个。在一些实现中,周围状态包括周围能见度值。在一些示例中,当周围能见度值小于1000米时,周围状态低于预定阈值。在一些示例中,该方法包括在数据处理硬件处从由第一车辆支持的传感器系统或由第一车辆支持的驱动系统中的至少一个接收数据。车辆系统数据可以包括传感器系统数据或驱动系统数据中的至少一个。传感器系统可以包括照相机、光传感器或雨传感器中的至少一个。驱动系统可包括牵引力控制系统(tcs)和电子稳定控制器(esc)。
6.在一些实现中,该方法包括从沿道路定位的路侧单元接收路侧警报信号。在该情况下,周围状态也基于接收到的路侧警报。
7.该方法还可以包括接收一个或多个其他车辆的通信信号。通信系统可以是车对x
(v2x)系统。
8.在一些示例中,去往驾驶员的消息包括在由第一车辆支持的显示器上显示的视觉警告。附加地或替代地,去往驾驶员的消息可以包括从第一车辆的音频系统输出的可听警告。在一些示例中,该方法还包括向自主驾驶控制器传输周围状态和通信信号,使得自主驾驶控制器调整第一车辆的一个或多个驾驶行为。
9.本公开的另一方面提供了一种系统,该系统包括由第一车辆支持的数据处理硬件和与数据处理硬件通信的存储器硬件。存储器硬件存储当在数据处理硬件上执行时执行操作的指令。这些操作包括上述方法。
10.在附图和下面的描述中阐述了本公开的一种或多种实现的细节。其他方面、特征和优势将从描述和附图以及从权利要求书清楚。
附图说明
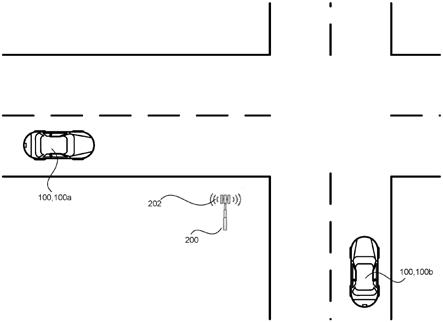
11.图1是沿交叉路口(intersection)的两个车的示例性概览的示意图。
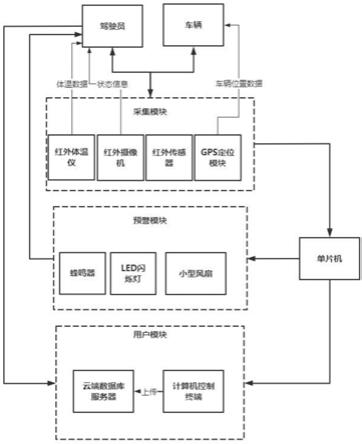
12.图2是具有车辆警告系统的车辆的示例性概览的示意图。
13.图3是用于向第一车辆的驾驶员提供第二不可见车辆正在接近的早期警告的方法的操作的示例性布置的示意图。
14.各种图中相同的参考符号指示相同的元素。
具体实施方式
15.参考图1和图2,在一些实现中,第一车辆100、100a和第二车辆100、100b两者都配备有车辆通信系统110。通信系统110允许车辆100与其他实体以及彼此通信。通信系统110可以包括v2x通信系统。v2x通信系统可以使用以下连接类别中的一个或多个来发送和/或接收消息和/或信息:wlan连接,例如基于ieee 802.11、ism(工业、科学、医疗频带)连接、bluetooth
®
连接、zigbee连接、uwb(超宽带)连接、wimax
®
(全球微波接入互操作性)连接、lte
‑
v2x、专用短程通信(dsrc)、红外连接、移动无线电连接和/或基于雷达的通信。在一些示例中,车辆通信系统110从一个或多个路侧单元(rsu)200接收一个或多个路侧警报(rsa)信号202。rsu 200沿道路定位,并提供与道路基础设施、天气条件、事故、建筑区域相关的路侧信息或与当前道路相关的任何其他信息。
16.在一些示例中,通信系统110包括用于接收和传输消息/信号的天线112、数据处理硬件和能够存储使数据处理硬件执行一个或多个操作的指令的存储器硬件。通信系统110可以是控制器150的部分。车辆100可以包括用户接口120。在一些示例中,用户接口120是触摸屏显示器124,其向驾驶员提供显示的警告消息。在其他示例中,用户接口120包括旋钮或鼠标以供驾驶员进行选择。用户接口120可以向驾驶员显示一个或多个警告消息172、182、192。在一些示例中,用户接口120经由一个或多个输入机制或触摸屏显示器124从驾驶员接收一个或多个用户命令和/或向驾驶员显示一个或多个通知,驾驶员输入例如是对接收的警告的确认。在一些示例中,用户接口120包括输出可听警告消息172、182、192的音频系统126。
17.车辆100包括传感器系统130以提供可靠且稳健的驾驶。传感器系统130可以包括不同类型的传感器,这些传感器可以单独使用或彼此结合使用以创建对车辆100的环境的
感知,该感知用于车辆100的驾驶并且帮助驾驶员基于传感器系统130检测到的对象和障碍物做出智能决定。传感器系统130可以包括一个或多个照相机132。
18.在一些实现中,传感器系统130还可以包括光传感器134,光传感器134被配置为使得车辆前灯在测量的环境光处于第一预定阈值处时打开并且在测量的环境光处于第二预定阈值处时关闭车辆前灯。此外,传感器系统130可包括感测雨何时落下的雨传感器136。
19.传感器系统130可以包括其他传感器,诸如但不限于雷达、声纳、lidar(光检测和测距,其可能需要测量散射光的性质以找到遥远目标的距离和/或其他信息的光学遥感)、ladar(激光检测和测距)等。也可以使用附加的传感器。
20.车辆100还包括驱动系统140。驱动系统140包括牵引力控制系统(tcs)142和电子稳定控制器(esc)144。tcs 142是被设计用于防止被驱动道路轮(road wheel)失去牵引力的系统。当油门(throttle)输入和引擎扭矩与道路表面条件不匹配时,tcs 142被激活。esc 144是计算机化系统,其通过检测和减少牵引力的损失来改进车辆的稳定性。当esc 144检测到失去操纵控制时,esc 144自动应用制动器以帮助将车辆操纵到驾驶员打算去的地方。因此,对个体车轮施加制动以控制车辆。
21.在一些示例中,车辆100包括控制器150。车辆控制器150包括与非暂时性存储器154(例如,硬盘、闪存、随机存取存储器)通信的计算设备(或处理器)152(例如,中央处理单元,其具有一个或多个计算处理器),非暂时性存储器154能够存储在(一个或多个)计算处理器152上执行的指令。
22.控制器150执行一个或多个应用158,应用158包括但不限于交叉路口移动辅助(ima)170、前方碰撞警告(fcw)180和不要超车(do not pass)警告(dnpw)190。这些应用170 、180、190通过通信系统110接收一个或多个通信信号114并分析这些通信信号114以向驾驶员提供与前方道路、其他车辆和当前车辆相关的信息或警告消息172、182、192。ima 170允许车辆100a自从所有方向接近交叉路口的其他车辆100b接收消息/信号114。ima 170计算碰撞的可能性并向驾驶员提供ima警告消息172,该消息172以渐进的紧迫性建议驾驶员。因此,ima允许第一车辆100a知道第二车辆100b,即使第一车辆100a的驾驶员没有看到第二车辆100b。fcw 180计算与前方交通中在相同车道中在相同方向上移动的另一车辆100即将追尾碰撞的可能性。fcw 180向驾驶员提供fcw警告消息182,该消息182以渐进的紧迫性建议驾驶员。在由于超车区域被在相反的方向上移动的车辆100占据而不能使用超车区域安全超越前方较慢移动的车辆100时的超车机动尝试期间,dnpw 190向第一车辆100a的驾驶员提供dnpw警告消息192。在一些示例中,即使驾驶员没有尝试超越他/她前面的车辆100,dnpw 190也提供信息。因此,当应用170、180、190之一接收到通信信号114并确定警告消息172、182、192应该被发送到驾驶员时,然后应用170、180、190向用户接口120发送指令158以第一时间向驾驶员提供警告消息172、182、192。第一时间可以是从接收到通信信号114的时间开始的预定时间。
23.此外,控制器150执行早期警告系统160,该系统160分析传感器系统数据131、驱动系统数据141和/或来自rsu 200的rsa信号202以确定应用170、180之一是否应该在第二时间处通过用户接口120向驾驶员发送警告消息172、182、192,第二时间在第一时间之前,即,第二时间比第一预定时间早。因此,早期警告系统160确定ima 170、fcw 180和dnpw 190是否应该在恶劣天气条件期间在早于第一预定时间的第二时间处向第一车辆100a的驾驶员
提供警告消息172、182、192,因为第一车辆100a的驾驶员可能由于雾、暴风雪、下雨不能够看到接近的第二车辆100b或车辆和/或道路条件将不允许正常制动(例如,雪或冰)。
24.早期警告系统160确定包括天气信息的车辆周围状态162。早期警告系统160可以通过分析rsa信号202、雨传感器数据137和照相机数据133来确定天气信息。此外,早期警告系统160还可以通过分析rsa信号202、tcs数据143和esc数据145来确定天气信息。在一些示例中,车辆周围状态162包括基于光传感器数据135和/或照相机132的归因于恶劣天气(例如,大雨、雪)的能见度条件和/或归因于环境条件(例如,雾、夜间、日出/日落)的能见度条件。
25.早期警告系统160分析接收的车辆系统数据131、141和(一个或多个)rsa信号202并且基于分析的数据确定驾驶员是否具有差的能见度和/或道路条件是否具有低“mu”(μ)系数值(即,道路是否很滑)。能见度是可以清楚地识别对象或光的距离的测量。在一些示例中,视国家而定,能见度是通过地表天气观测和metar代码以米或法定英里(statute miles)为单位报告的。雾具有小于3300英尺的能见度,薄雾(mist)具有在0.62英里和1.2英里之间的能见度,并且雾霾(haze)具有从1.2英里到3.1英里的能见度。雾和薄雾主要包括水滴,而雾霾和烟雾可能具有较小的颗粒大小。小于330英尺的能见度通常报告为零。在零能见度下,道路可能被关闭以避免车辆碰撞。因此,差的能见度可能从330英尺和3281英尺(约1000米)之间的能见度变动。
26.因此,当应用170、180、190中的一个接收到通信信号114时,早期警告系统160确定驾驶员是否应该在第一时间之前的第二时间处得到警告消息172、182、192。例如,如果早期警告系统160确定驾驶员具有良好的能见度,即周围状态162高于预定阈值,则应用170、180、190向用户接口120发送指令158以在第一时间处向驾驶员提供警告消息172、182、192。当周围能见度值大于预设能见度值时,周围状态162高于预定阈值。预设能见度值可以是1000米,或任何其他预设值。然而,如果早期警告系统160确定周围状态低于预定阈值,即驾驶员具有差能见度,则早期警告系统160指示用户接口120在早于第一时间的第二时间处提供警告消息172、182、192。在一些示例中,如果应用170、180、190之一包括警告消息172、182、192并且周围状态162低于预定阈值,则在早于驾驶员将被通知周围状态162是否高于预定阈值的时间的时间处向驾驶员警告关于第二车辆100b。在一些示例中,如果应用170、180、190中没有应用包括警告消息172、182、192,但是道路状态低于预定阈值,则早期警告系统160将不用任何消息172、182、192来警告驾驶员。
27.在一些实现中,除了指示用户接口120向驾驶员显示警告消息172、182、192和/或生成可听警告声音之外,早期警告系统160更新ttc(时间对碰撞(time
‑
to
‑
collision))信号,该信号指示如果两辆车保持其当前航向、速度、加速度等,则第一车辆100a与第二车辆100b碰撞将花费的时间。ttc信号可以由早期警告系统160的应用170、180、190中的一个用来指示车辆的驱动系统140或车辆的自主系统调整一个或多个车辆行为以避免碰撞。
28.图3提供了方法300的操作的示例布置,该方法300使用图1和2的早期警告系统160向第一车辆100a的驾驶员提供第二不可见车辆110b正在接近第一车辆100a的早期警告消息。在框302处,方法300包括在由第一车辆100a支持的数据处理硬件152(执行早期警告系统160)处接收来自通信系统110的通信信号114。通信系统110可以是v2x系统,其包括从一个或多个其他车辆110b接收通信信号114的天线112。早期警告系统160包括一个或多个应
用170、180、190,诸如但不限于交叉路口移动辅助(ima)170、前方碰撞警告(fcw)180或不要超车警告(dnpw)190。通信系统110可以包括其他应用。
29.在框304处,方法300包括在数据处理硬件152处基于通信信号114确定警告消息172、182、192。换言之,一个或多个应用170、180、190分析通信信号114并确定是否应该向驾驶员发送一个或多个警告消息172、182、192。
30.在框306处,方法300包括从数据处理硬件152,即应用170、180、190之一向由第一车辆100a支持并与数据处理硬件152通信的用户接口120传输指令158,以在第一时间处向驾驶员提供一个或多个警告消息172、182、192。用户接口120可以包括显示器124和/或音频系统126。因此,可以在显示器124上显示警告消息172、182、192。另外或替代地,可以通过音频系统126输出警告消息172、182、192。
31.在框308处,方法300包括在数据处理硬件152处从由第一车辆100a支持的一个或多个车辆系统130、140接收车辆系统数据131、141。一个或多个车辆系统130、140可以包括传感器系统130,其向处理器152(即,早期警告系统160)提供传感器系统数据131。在一些示例中,传感器系统130包括一个或多个照相机132、一个或多个光传感器134和/或(一个或多个)雨传感器136。因此,传感器系统数据131可以包括照相机数据133、光传感器数据135和/或雨传感器数据137。另外或替代地,一个或多个车辆系统130、140可以包括驱动系统140,其向处理器152(即,早期警告系统160)提供驱动系统数据141。在一些示例中,驱动系统140包括牵引力控制系统(tcs)142和电子稳定控制器(esc)144。因此,驱动系统数据141可以包括tcs数据143和/或esc数据145。一个或多个车辆系统130、140可以包括被配置为检测道路或天气条件的其他车辆系统。在一些实现中,方法300还包括从沿道路定位的路侧单元200接收路侧警报信号202。通信系统110接收路侧信号202并将信号202提供给早期警告系统160。
32.在框310处,方法300包括由数据处理硬件152基于车辆系统数据131、141确定周围状态162。在一些示例中,周围状态162还基于接收到的路侧警报信号202。
33.在框312处,方法300包括从数据处理硬件152向用户接口120传输指令158以在周围状态162低于预定阈值时在第一时间之前的第二时间处向驾驶员提供一个或多个警告消息172、182、192。在一些示例中,周围状态162包括周围能见度值。当周围能见度值小于预设能见度值时,周围状态162低于预定阈值。预设能见度值可以是1000米,或任何其他预设值。
34.在一些示例中,第一车辆100a是包括自主驾驶控制器(未示出)的自主或半自主车辆,该控制器被配置为执行一个或多个车辆行为以自主或半自主驾驶车辆。在该情况下,方法300可以包括向自主驾驶控制器传输周围状态162和一个或多个警告消息172、182、192,使自主驾驶控制器调整第一车辆100a的一个或多个驾驶行为。
35.这里描述的系统和技术的各种实现可以以数字电子电路、集成电路、专门设计的asic(专用集成电路)、计算机硬件、固件、软件和/或它们的组合实现。这些各种实现可以包括在一个或多个计算机程序中的实现,一个或多个计算机程序在包括耦合的可以是专用或通用的至少一个可编程处理器的可编程系统上可执行和/或可解释以从存储系统、至少一个输入设备和至少一个输出设备接收数据和指令,以及向存储系统、至少一个输入设备和至少一个输出设备传输数据和指令。
36.这些计算机程序(也称为程序、软件、软件应用或代码)包括用于可编程处理器的
机器指令,并且可以以高级过程和/或面向对象的编程语言和/或以汇编/机器语言实现。如本文所用,术语“机器可读介质”和“计算机可读介质”是指用于向可编程处理器提供机器指令和/或数据的任何计算机程序产品、装置和/或设备(例如,磁盘、光盘、存储器、可编程逻辑设备(pld)),包括接收机器指令作为机器可读信号的机器可读介质。术语“机器可读信号”是指用于向可编程处理器提供机器指令和/或数据的任何信号。
37.本说明书中描述的主题和功能操作的实现可以以数字电子电路实现,或以计算机软件、固件或硬件实现,包括本说明书中公开的结构及其结构等同物,或以它们中的一个或多个的组合实现。此外,本说明书中描述的主题可以实现为一个或多个计算机程序产品,即,编码在计算机可读介质上的计算机程序指令的一个或多个模块,用于由数据处理装置执行或控制数据处理装置的操作。计算机可读介质可以是机器可读存储设备、机器可读存储基板、存储器设备、影响机器可读传播信号的物质的组合物,或者它们中的一个或多个的组合。术语“数据处理装置”、“计算设备”和“计算处理器”涵盖用于处理数据的所有装置、设备和机器,包括通过例如可编程处理器、计算机、或多个处理器或计算机。除了硬件之外,装置可以包括为所讨论的计算机程序创建执行环境的代码,例如,构成处理器固件、协议栈、数据库管理系统、操作系统、或它们中的一个或多个的组合的代码。传播信号是人工生成的信号,例如机器生成的电、光或电磁信号,其被生成以编码信息以传输到合适的接收器装置。
38.类似地,虽然在附图中以特定顺序描绘了操作,但这不应被理解为要求以所示出的特定顺序或按顺序执行此类操作,或执行所有图示的操作,以实现期望的结果。在某些情况下,多任务和并行处理可能是有利的。此外,上述实施例中各种系统部件的分离不应被理解为在所有实施例中都需要这样的分离,并且应当理解的是,所描述的程序部件和系统一般可以一起集成在单个软件产品中或被打包成多个软件产品。
39.已经描述了许多实现。然而,应当理解,在不脱离本公开的精神和范围的情况下可以进行各种修改。因此,其他实现在以下权利要求书的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。