一种电动无人机组合供电装置、方法及系统
1.本技术是名为《一种电动无人机组合供电装置、方法及系统》的专利申请的分案申请,原申请的申请日为2019年04月12日,申请号为201910293309.7。
技术领域
2.本发明涉及无人机领域,特别是涉及一种电动无人机组合供电装置、方法及系统。
背景技术:
3.无人机发展至今已有百年历史,目前已经广泛应用于军事和民用领域。军用无人机改变了传统的作战模式,向中继通讯、情报搜集、电子对抗和空中打击四大职能转变;民用无人机也在农林植保、电力巡检、消防救灾、气象监测、包裹派送等领域发挥着举足轻重的作用。无人机作为一种利用无线电设备或自带程序控制、可重复使用的不载人航天器,按照飞行平台构型可以分为固定翼、旋翼、伞翼、扑翼、直升飞机和无人飞艇等类型。其中电动多旋翼无人机因其操纵简单、成本低、机动性高等优点,已经成为国内外研究的热点。但采用传统锂电池作为动力的多旋翼无人机,续航时间普遍不超过半小时,限制了该类型无人机的进一步发展,续航时间短的难题亟待解决。
4.在航天航空领域,氢氧燃料电池、太阳能电池等新型能源已经开始取代传统的燃油燃气,新能源飞行器成为未来发展的一个重要趋势。氢氧燃料电池无人机采用氢气作为燃料,将氢气的化学能直接转化为电能,为无人机飞行提供能量,反应过程不受卡诺循环的限制,因此转化效率高,且具有零污染、能量密度大等优点。由于氢氧燃料电池所需氢气携带储氢罐,体积大,储氢量少,续航里程短,同时氢氧燃料电池动态性能比较软,难以满足无人机在需要抗湍流、变换飞行姿势等工况下需要的较大瞬时功率。
技术实现要素:
5.本发明的目的是提供一种电动无人机组合供电装置、方法及系统,满足无人机瞬时大功率的需求。
6.为实现上述目的,本发明提供了如下方案:
7.一种电动无人机组合供电装置,包括:金属空气电池、超级电容、信号检测模块、金属空气电池控制模块、超级电容充电管理模块、组合电源控制器和并流器;
8.所述金属空气电池以及所述超级电容的电能输出端与所述并流器的电能输入端连接;
9.所述并流器的电能输出端与无人机负载的电能输入端连接;
10.所述金属空气电池的控制输入端与所述金属空气电池控制模块的控制输出端连接,所述超级电容充电管理模块的控制输出端与所述超级电容的控制输入端连接;
11.所述信号检测模块的信号输入端分别与所述金属空气电池和所述超级电容连接;所述信号检测模块的信号输出端与所述组合电源控制器的信号输入端连接;所述组合电源控制器的信号输入端还与无人机飞行控制系统的信号输出端连接,用于获取所述无人机飞
行控制系统发送的功率需求信号;所述组合电源控制器的控制输出端与所述金属空气电池控制模块以及所述超级电容充电管理模块的控制输入端连接;
12.所述信号检测模块用于检测所述金属空气电池以及所述超级电容的荷电状态,所述组合电源控制器用于在需求功率超过所述金属空气电池的额定输出功率时向所述超级电容充电管理模块发出功率不足信号;所述超级电容充电管理模块在接收到所述功率不足信号时控制所述超级电容放电补充功率;所述并流器用于将所述金属空气电池输出的电能和所述超级电容输出的电能进行并流;
13.所述组合电源控制器内置并流模型,并流模型通过并流器分别对金属空气电池和超级电容的输出功率进行实时控制,并通过超级电容充电管理模块实现金属空气电池对超级电容的安全电流充电;
14.组合电源控制器对金属空气电池和超级电容的供电控制采用模糊控制方法,模糊控制方法是将无人机负载的需求功率在金属空气电池和超级电容之间进行合理分配,金属空气电池功率在无人机负载需求功率中的功率占比k
metal
作为模糊控制的输出结果,表达形式如下式:
15.k
metal
=p
metal
/p
req
16.p
metal
=p
req
·
k
metal
17.p
scap
=p
req
(1
‑
k
metal
)
18.确定模糊逻辑控制的输入量是无人机负载需求功率p
req
、金属空气电池荷电状态soc
metal
以及超级电容荷电状态soc
scap
;金属空气电池和超级电容的荷电状态soc限制条件如下所示:
19.soc
metal_max
(80%)≥soc
metal
≥soc
metal_min
(20%)
20.soc
scap_max
(80%)≥soc
scap
≥soc
scap
(20%)。
21.可选地,所述组合电源控制器通过can总线与无人机飞控系统进行通信。
22.可选地,所述组合电源控制器与上位机以及远程控制器通过无线通信连接。
23.可选地,所述装置实时监测金属空气电池和超级电容的工作状态,监测信息包括金属空气电池的电流、电压、电堆温度、荷电状态,超级电容的电流、电压以及荷电状态。
24.可选地,所述金属空气电池为铝空气电池、镁空气电池、锂空气电池或锌空气电池。
25.可选地,所述超级电容为2500f/2.7v的超级电容。
26.为实现上述目的,本发明还提供了一种电动无人机组合供电方法,应用于所述的电动无人机组合供电装置,所述组合供电方法包括:获取所述无人机的功率需求信号;
27.根据所述功率需求信号判断需求功率是否大于金属空气电池的额定输出功率,得到第一判断结果;
28.若所述第一判断结果表示是,则获取超级电容的剩余电量;
29.判断所述超级电容的剩余电量是否大于电容电量最低阈值,得到第二判断结果;
30.若所述第二判断结果表示是,则向超级电容充电管理模块发出控制超级电容放电的控制信号;
31.若所述第二判断结果表示否,则发出功率不足告警信号;
32.若所述第一判断结果表示否,则控制所述金属空气电池按照所述功率需求信号输
出功率。
33.可选地,所述控制所述金属空气电池按照所述功率需求信号输出功率,具体包括:判断所述金属空气电池的剩余电量是否大于电池电量最低阈值,得到第三判断结果;
34.若所述第三判断结果表示否,则发出电量不足告警信号,并向无人机飞行控制系统发出降低需求功率的请求;
35.若所述第三判断结果表示是,则根据所述功率需求信号判断所述额定输出功率与所述需求功率的差值是否大于最低预设差值,得到第四判断结果;
36.若所述第四判断结果表示是,则根据所述超级电容的剩余电量对所述金属空气电池的输出电量的多余部分进行处理。
37.可选地,在所述发出功率不足告警信号之后,还包括:向无人机飞行控制系统发出降低需求功率的请求。
38.可选地,所述根据所述超级电容的剩余电量对所述金属空气电池的输出电量的多余部分进行处理,具体包括:判断所述超级电容的剩余电量是否大于电容电量最高阈值,得到第五判断结果;
39.若所述第五判断结果表示否,则控制超级电容充电管理模块将所述金属空气电池的输出电量的多余部分充入所述超级电容。
40.根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明所公开的电动无人机组合供电装置、方法及系统,在无人机有瞬时大功率的需求时,利用超级电容放电提高瞬时输出功率,从而满足无人机瞬时大功率的需求。
附图说明
41.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
42.图1为本发明的电动无人机的系统构成图;
43.图2为本发明实施例1的组合供电装置的结构图;
44.图3为本发明实施例1的组合供电装置的工作流程图;
45.图4为本发明实施例2提供的电动无人机组合供电方法的方法流程图。
具体实施方式
46.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
47.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
48.本发明使用金属空气电池作为主要动力电源,提供无人机主要动力,但由于金属空气电池特性偏软,无法提供无人机负载在启动瞬间、快速爬升、突然大风等情况下的大功率需求,因此需要配置辅助电源。辅助电源能够在短时间内提供无人机所需大功率,也能在负载需求功率不高的情况下由金属空气电池对辅助电源进行充电,保证电池电量在设定范围内。
49.为此,本发明提出一种金属空气电池与超级电容组合供电系统,由于金属空气电池能量密度大,续航里程长,不用储气罐,占用空间小,超级电容功率密度大,爬坡及加速能力强,二者配合,既可以保持长距离飞行,又能适应复杂环境飞行。
50.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
51.实施例1:
52.图1为本发明的电动无人机的系统构成图。
53.参见图1,本发明所针对的电动无人机为多旋翼无人机。该多旋翼无人机由动力系统、飞控系统(即飞行控制系统)、机身系统、数据传输设备、机载设备和遥控器组成。
54.(1)动力系统
55.多旋翼无人机动力系统的主要作用是为无人机的飞行提供动力,主要包括电动机、电子调速器、螺旋桨和电池四个部分。其中,电动机负责将电能转化为机械能,目前无人机电动机以无刷直流电机为主。电子调速器统称电调,负责将飞控系统的控制信号快速转变为电枢电压和电流,以控制电机的转速。螺旋桨是直接产生推力的部件,旋转方向分为正反两种。电池是多旋翼无人机的能量来源,直接关系到无人机的续航时间、飞行距离和最大负载重量等重要指标。
56.(2)飞控系统
57.飞控系统是指能够稳定无人机的飞行姿态,并能够控制无人机自主或半自主飞行的系统,是无人机的控制中心。飞控系统包括硬件和软件两部分,其中,硬件部分包括陀螺仪、加速度传感器、gps模块和电路控制扳等;软件模块包括控制算法、程序等。
58.(3)机身系统
59.机身系统包括机架和起落架。其中,机架是多旋翼无人机的主体,很多设备安装在机架上,根据机臂个数不同可分为三旋翼、四旋翼、六旋翼、八旋翼、十六旋翼等。起落架是无人机唯一和地面接触的部分,作为整机在起飞和降落时的缓冲。
60.(4)数据传输设备
61.数据传输设备负责将无人机采集的图片、视频等各类数据实时稳定地发射给地面接收系统。
62.(5)机载设备
63.多旋翼无人机根据任务的不同,可以搭载不同的设备进行工作,如农药喷洒设备、航拍相机、测绘激光雷达、救生设备等。
64.(7)遥控器
65.遥控器用于对无人机的实时操纵,可以监控无人机的各项状态指标,一般按照通道将遥控器分为六通道、八通道、十二通道等。
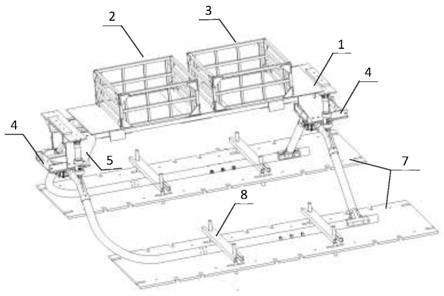
66.本发明将上述动力系统中的电池替换为组合供电装置。图2为本发明实施例1的组
合供电装置的结构图。
67.参见图2,该组合供电装置,包括:金属空气电池1、超级电容2、信号检测模块3、金属空气电池控制模块4、超级电容充电管理模块5、组合电源控制器6和并流器7;
68.所述金属空气电池1以及所述超级电容2的电能输出端与所述并流器7的电能输入端连接;所述并流器7的电能输出端与无人机负载8的电能输入端连接;
69.所述金属空气电池1的控制输入端与所述金属空气电池控制模块4的控制输出端连接,所述超级电容充电管理模块5的控制输出端与所述超级电容2的控制输入端连接;
70.所述信号检测模块3的信号输入端分别与所述金属空气电池1和所述超级电容2连接;所述信号检测模块3的信号输出端与所述组合电源控制器6的信号输入端连接;所述组合电源控制器6的信号输入端还通过can总线与无人机飞行控制系统9的信号输出端连接,用于获取所述无人机飞行控制系统9发送的功率需求信号;所述组合电源控制器6的控制输出端与所述金属空气电池控制模块4以及所述超级电容充电管理模块5的控制输入端连接;
71.所述信号检测模块3用于检测所述金属空气电池1以及所述超级电容2的荷电状态,所述组合电源控制器6用于在需求功率超过所述金属空气电池1的额定输出功率时向所述超级电容充电管理模块5发出功率不足信号;所述超级电容充电管理模块5在接收到所述功率不足信号时控制所述超级电容2放电补充功率;所述并流器7用于将所述金属空气电池1输出的电能和所述超级电容2输出的电能进行并流。
72.所述组合电源控制器6还通过无线与上位机10通信连接,并且所述组合电源控制器6还与远程控制器通过无线通信连接。
73.所述组合电源控制器6为主控芯片。所述金属空气电池1为额定输出功率为5000w的铝空气电池。所述超级电容2为2500f/2.7v的超级电容。
74.金属空气电池在无人机负载的需求功率小于额定输出功率时,通过超级电容充电器对超级电容进行充电;在负载需求功率较大时,停止对超级电容进行充电,金属空气电池和超级电容通过并流器输出功率到无人机负载。并流器具备多端输入和电流分配的功能,能够按照能量管理策略实时对金属空气电池和超级电容的输出功率进行控制,以满足无人机负载的功率需求。所述组合电源控制器内置并流模型,并流模型能够通过并流器分别对金属空气电池和超级电容的输出功率进行实时控制,并通过超级电容充电管理模块实现金属空气电池对超级电容的安全电流充电,对超级电容有较好的保护作用。
75.金属空气电池的能量密度为300wh/kg~1000wh/kg。超级电容是介于普通电容器和动力电池间的电化学储能器件。超级电容可以提供比金属空气电池更高的功率密度,同时又可以提供比普通电容器更大的能量密度。超级电容比功率密度10000w/kg~20000w/kg。
76.金属空气电池虽能提供较高的比能量,对于负载的长续航可以起到极大的作用,但是金属空气电池因其功率密度较低而不能提供较大的峰值功率,金属空气电池作为电动负载的唯一能量源不能满足电动负载在启动、加速、爬坡等工况下的峰值功率。同时,由于金属空气电池产能方式的特殊性,不具备充电功能,所以出于制动能量回收的要求也需要一种电源作为金属空气电池的辅助。超级电容具有瞬时放电电流大、循环寿命长、充电时间短、比功率高等特点能够有效弥补金属空气动力电池能量密度低以及不可充电的缺点,将金属空气电池和超级电容配合使用,既可以延长无人机负载的续航时间,又可以满足无人
机负载的动力性能,还可以提高能量回收的效率。
77.高能量密度的金属空气电池作为主能量源,高功率密度的超级电容作为辅助能量源,两者匹配使得无人机负载的能量和功率得到双重满足。对于复合驱动电源能量分配,基本的分配原则是:高比能量的金属空气电池在巡航期间大部分平缓稳定且功率不高的工况下提供能量,而高比功率的超级电容在起飞、悬停、抗风、抗湍流等工况条件以及速度变化频繁的阶段提供峰值功率。所以金属空气电池对应的是保证长续航,而超级电容是保证全程的峰值功率。
78.根据电动无人机任务,一般需要经历“任务起飞”、“按设定路径执行任务”“完成返航”三个主要步骤。因此电动无人机的动力系统一般有三种工作模式:
79.(1)启动/爬升/应急模式;(2)巡航模式;(3)轻载模式。
80.模式1:启动/爬升/应急模式(超载)
81.无人机在此模式下,无人机负载的需求功率可达额定输出功率的数倍,金属空气电池对快速变化的负载响应速度缓慢,难以及时提供需求功率,超级电容功率密度高,可以补充金属空气电池不足的部分,满足无人机负载所需瞬时功率。
82.模式2:巡航模式(均载)
83.无人机进入巡航模式后,负载需求功率变化缓慢,金属空气电池能够及时提供能量,此时超级电容作辅助电源工作。无人机处于该工作模式下,金属空气电池输出功率和需求功率大致相当,超级电容基本上不进行充放电操作。
84.模式3:轻载模式
85.无人机在载荷减小、降落等情况下,负载需求功率明显小于金属空气电池额定输出功率,此时金属空气电池为无人机提供能量的同时视情况为超级电容充电。
86.此外,电动无人机还要经历悬停、抗风、抗湍流等工况条件,混合供电系统需要根据具体情况满足飞行需求。
87.混合供电系统满足以下功能及技术指标:
88.(1)支持can总线协议
89.组合电源控制器通过can总线与飞控系统进行通信,一方面获取无人机负载的需求功率,另一方面将动力系统的状态等信息上传到远程控制器。
90.(2)支持无线传输功能
91.无人机在进行飞行测试时,需要将动力系统的状态信息通过无线通信模块传输到上位机,同时上位机也可以通过无线通信模块向无人机发送控制指令。
92.(3)多能源系统控制与调度
93.组合电源控制器根据能量管理策略对并流器进行控制,将需求功率实时分配给金属空气电池和超级电容,满足无人机负载要求,确保能量的高效流动。
94.(4)安全检测功能
95.对系统出现漏电、过温、过流等异常工作状况进行提示和告警,并根据相应的故障情况采取安全保护措施。
96.(5)状态监测功能
97.实时监测金属空气电池和超级电容的工作状态,确保系统正常工作,监测信息包括金属空气电池的电流、电压、电堆温度、荷电状态(state ofcharge,soc);超级电容的电
流、电压以及soc。
98.(6)数据存储功能
99.组合电源控制器内置数据存储功能。系统将运行过程中的重要数据定时保存到本地存储设备中,方便后续数据查看和处理等工作。
100.表1为组合供电装置的技术指标表。
101.表1
102.参见表1,电压、电流和功率是组合供电装置需要满足无人机正常飞行最重要的三个性能指标;为了适应无人机工作环境的变化,系统需要工作在一定范围的温度、湿度和高度下;由于无人机飞行重量的限制,电源总重量需要小于上限值;为了满足无人机续航时间的要求,金属空气电池额定功率必须满足要求,事先确定好;为了实现与飞控系统和上位机的通信,系统支持不同类型的通信接口;数据存储是系统具备的功能之一,需要一定容量的存储空间;为了保障电源供电的可靠性,系统平均故障间隔时间大于设定值。
103.金属空气电池与超级电容组成的组合供电装置是为解决电动多旋翼无人机续航时间短的一款稳定、高效、可靠的综合供电设备,相比纯锂动力电池,无人机续航时间从原来的20分钟延长到4个小时左右。无人机在工作过程中,金属空气电池作为主要动力源提供长航时飞行所需能量,但金属空气电池特性偏软,无法提供无人机负载在启动瞬间、快速爬升、突然大风等情况下的大功率需求,因此需要配置超级电容。超级电容能够在短时间内提供无人机所需大功率,也能在负载需求功率不高的情况下由金属空气电池对超级电容进行充电,保证超级电容电量在设定范围内。
104.图3为本发明实施例1的组合供电装置的工作流程图。
105.参见图3,系统工作时首先进行初始化操作,主程序进入一个大循环体:
106.对金属空气电池和超级电容的电压、电流、温度等信号进行采集,判断系统是否正常工作,若系统工作不正常则关闭程序,若各项指标正常则进行以下操作:
107.(1)soc估算:采用开路电压法和安时积分法相结合的方式对金属空气电池和超级电容soc进行估算;
108.(2)can通信:通过与无人机飞控系统通信获取无人机负载需求功率;
109.(3)能量管理:采用模糊神经网络能量管理算法对金属空气和超级电容的输出功率进行分配,电源功率是通过查询离线存储的模糊控制表得到的;
110.(4)无线通信及数据存储:通过无线传输模块与上位机通信将数据保存到pc端,同时将数据保存到本地sd卡。
111.(5)最后判断系统是否接收到停止工作的信号,若是系统关闭程序,否则继续循环操作。
112.本发明的组合供电装置的能量控制方案如下:
113.1.金属空气电池单独驱动电机:金属空气电池作为系统的主要能量源,它提供整个电动负载巡航阶段的大部分能量,在一般情况下保持匀速飞行,无人机负载需求功率不大,由金属空气电池单独提供能量。
114.2.金属空气电池和超级电容共同驱动负载电机。无人机在爬坡或者加速飞行时,驱动电机不但需求功率较高,同时还需要大功率持续较长时间。如果是由金属空气电池单独供能,很可能达不到功率需求;如果由超级电容单独供能,由于超级电容储能较低,不能
保证单独供能时的可靠性。综上所述,在加速爬坡阶段由金属空气电池和超级电容共同提供能量是最佳选择,能够很好保证无人机运行的动力性能。
115.3.金属空气电池对超级电容充电。在整个飞行过程中,由于超级电容存储的电量本身不大,所以在启动加速爬坡的过程中电量是可能会用完的,所以在飞行过程中金属空气电池通过超级电容充电管理模块对超级电容充电,保证超级电容在需要的时候发挥作用。
116.4.超级电容回收制动能量。无人机处于制动或者下降状态时,制动产生的能量流向组合供电装置,由于金属空气电池是一种不可充电电池,所以制动能量通过超级电容充电管理模块充电到超级电容中,当超级电容存储的能量已满时,不再回收无人机制动能量。
117.5.超级电容自放电。当电动无人机处于停飞或者检修状态时,需要对超级电容放电,以保证整个无人机的安全性。
118.组合电源控制器对金属空气电池和超级电容的供电控制采用模糊控制方法,模糊控制方法如下:
119.模糊控制方法应该满足以下条件:
120.1)组合供电装置实时跟踪负载需求功率;
121.2)金属空气电池作为主要能量来源,在工作过程中一直处于供电状态,当负载需求功率大于金属空气电池额定功率时,金属空气电池以额定功率输出;
122.3)当金属空气电池荷电状态(soc)不小于20%,金属空气电池正常输出功率,当金属空气电池soc小于20%时,金属空气电池停止工作;
123.4)充分利用超级电容瞬间输出大功率的特性,当负载需求功率小于金属空气电池额定功率时,金属空气电池对超级电容进行小电流充电,使超级电容soc维持在较高水平80%以上。
124.5)当负载处于轻载或制动状态时,负载的需求功率为很小或负,此时无人机负载的电机发挥发电作用,可以将能量回收到组合供电装置。由于组合供电装置中的金属空气电池不能回收能量,超级电容剩余电量未满就回收能量,如果超级电容剩余电量已满,不再回收能量。
125.6)当电动无人机处于非制动飞行状态时,负载的需求功率为正,此时需要分析需求功率正值的大小。如果需求功率较小,说明负载处于平稳运行或者低速运行状态,在金属空气电池的荷电状态soc不小于20%的情况下,金属空气电池供给相对稳定持续的小功率,如果金属空气电池的荷电状态soc小于20%,无法保证持续输出能量的状态,同时超级电容的荷电状不小于20%,那么超级电容将会和金属空气电池在此种小功率需求下共同提供能量。如果负载的需求功率较大,此时负载处于启动、加速、或者爬坡阶段,正常情况下由金属空气电池提供均值功率,超级电容提供峰值功率,超级电容提供的功率远大于金属空气电池提供的功率。但是如果超级电容或者金属空气电池的剩余电量出现了较低的情况,负载制动。
126.无人机的需求功率,其来源是由金属空气电池和超级电容两部分组成。如果不计能量传递过程中因为发热或机械损耗等造成的能量损失,三者之间的功率关系如下式:
127.preq=pmetal pscap
128.其中,preq是无人机负载的需求功率,pmetal是金属空气电池提供的功率,pscap
是超级电容提供的功率。
129.模糊控制方法最终的目的就是将无人机负载的需求功率在金属空气电池和超级电容之间进行合理分配,定义金属空气电池功率在无人机负载需求功率中的功率占比kmetal作为模糊控制的输出结果,表达形式如下式:
130.kmetal=pmetal/preq
131.pmetal=preq
·
kmetal
132.pscap=preq(1
‑
kmetal)
133.金属空气电池和超级电容可提供的功率由无人机负载需求功率和金属空气电池功率占比因子对表示。
134.要通过模糊控制得到最后的输出结果金属空气电池功率占比kmetal,就必须知道影响它的几个相关量,分别是需求功率、金属空气电池输出功率以及超级电容输出功率。由于荷电状态soc决定了金属空气电池的放电功率以及超级电容的充放电功率,可以确定模糊逻辑控制的输入量是无人机负载需求功率preq、金属空气电池荷电状态socmetal以及超级电容荷电状态socscap。不管是金属空气电池还是超级电容,其荷电状态soc都会对其本身的工作性能产生极大的影响,若超级电容的soc过高,就无法回收无人机制动状态下产生的能量,而超级电容的soc过低,更是会导致无人机启动、爬坡或者加速时的峰值功率无法得到保证,从而影响整机的动力性能。金属空气电池和超级电容的荷电状态soc限制条件如下所示:
135.socmetal_max(80%)≥socmetal≥socmetal_min(20%)
136.socscap_max(80%)≥socscap≥socscap(20%)
137.金属空气电池能量密度大,续航优势明显,可以全程提供无人机需要的稳定中小功率。但是金属空气电池不能提供大功率,同时不具备充电功能,无法回收无人机在下降或者刹车时的制动能量。而超级电容则与金属空气电池形成互补,超级电容能量密度小,不可能全程提供无人机需要的能量,但是超级电容功率密度大,当无人机在启动、爬坡或者加速阶段无法完全从金属空气力电池获取功率,超级电容可以提供极大的瞬时峰值功率,但是超级电容存储能量不多,只能满足短时间的峰值功率要求。
138.当无人机处于制动状态时,无人机负载的需求功率preq为负,此时无人机的电机发挥发电作用,可以将能量回收到组合供电装置。由于组合供电装置中的金属空气电池不能回收能量,所以需求功率为负的情况下控制规则比较简单。
139.输出量kmetal仅由需求功率的大小和超级电容的荷电状态socscap决定,与金属空气电池的荷电状态socmetal无关。超级电容剩余电量未满就回收能量,如果超级电容剩余电量已满,不再回收能量。
140.当无人机处于非制动正常巡航状态时,无人机的需求功率preq为正,此时需要分析需求功率正值的大小。如果需求功率preq较小,说明无人机处于平稳运行或者低速运行状态,在金属空气电池的荷电状态socmetal不是较小的情况下(大于20%),金属空气电池供给相对稳定持续的小功率,kmetal较大,如果金属空气电池的荷电状态socmetal较小(小于20%),可能无法保证持续输出能量的状态,同时超级电容的荷电状态socscap不是较小,那么超级电容将会和金属空气电池在此种小功率需求下共同提供能量。
141.如果无人机的需求功率preq较大,此时无人机处于启动、加速、或者爬坡阶段,正
常情况下由金属空气电池提供均值功率,超级电容提供峰值功率,超级电容提供的功率远大于金属空气电池提供的功率,金属空气电池功率占比因子kmetal较小,而超级电容功率占比因子kscap较大。但是如果超级电容或者金属空气电池的剩余电量出现了较低的情况,就要制动下降了。如果超级电容的荷电状态socscap较低,那么由金属空气电池主要提供功率。
142.实施例2:
143.本发明实施例2提供一种电动无人机组合供电方法,应用于上述电动无人机组合供电装置,用于在上述电动无人机组合供电装置具有瞬时大功率需求时提供瞬时大功率。
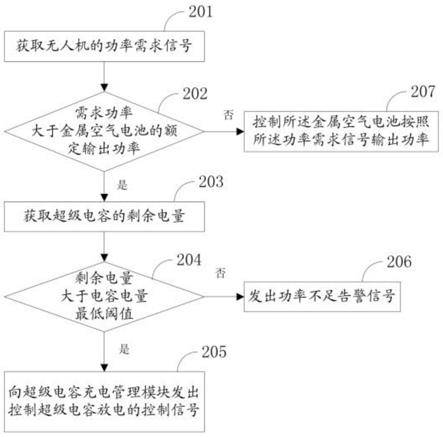
144.所述组合供电方法包括:
145.步骤201:获取所述无人机的功率需求信号;
146.步骤202:根据所述功率需求信号判断需求功率是否大于金属空气电池的额定输出功率,得到第一判断结果;
147.步骤203:若所述第一判断结果表示是,则获取超级电容的剩余电量;
148.步骤204:判断所述超级电容的剩余电量是否大于电容电量最低阈值,得到第二判断结果;
149.步骤205:若所述第二判断结果表示是,则向超级电容充电管理模块发出控制超级电容放电的控制信号;
150.步骤206:若所述第二判断结果表示否,则发出功率不足告警信号;
151.步骤207:若所述第一判断结果表示否,则控制所述金属空气电池按照所述功率需求信号输出功率。
152.可选的,步骤207具体包括:
153.判断所述金属空气电池的剩余电量是否大于电池电量最低阈值,得到第三判断结果;
154.若所述第三判断结果表示否,则发出电量不足告警信号,并向无人机飞行控制系统发出降低需求功率的请求;
155.若所述第三判断结果表示是,则根据所述功率需求信号判断所述额定输出功率与所述需求功率的差值是否大于最低预设差值,得到第四判断结果;
156.若所述第四判断结果表示是,则根据所述超级电容的剩余电量对所述金属空气电池的输出电量的多余部分进行处理。
157.可选的,在步骤206之后,还包括:
158.向无人机飞行控制系统发出降低需求功率的请求。
159.可选的,所述根据所述超级电容的剩余电量对所述金属空气电池的输出电量的多余部分进行处理,具体包括:
160.判断所述超级电容的剩余电量是否大于电容电量最高阈值,得到第五判断结果;
161.若所述第五判断结果表示否,则控制超级电容充电管理模块将所述金属空气电池的输出电量的多余部分充入所述超级电容。
162.实施例3:
163.本发明实施例2提供一种电动无人机组合供电系统,应用于上述电动无人机组合供电装置,用于在上述电动无人机组合供电装置具有瞬时大功率需求时提供瞬时大功率。
164.所述组合供电系统包括:
165.需求功率获取模块,用于获取所述无人机的功率需求信号;
166.第一判断模块,用于根据所述功率需求信号判断需求功率是否大于金属空气电池的额定输出功率,得到第一判断结果;
167.电容电量获取模块,用于若所述第一判断结果表示是,则获取超级电容的剩余电量;
168.第二判断模块,用于判断所述超级电容的剩余电量是否大于电容电量最低阈值,得到第二判断结果;
169.电容放电模块,用于若所述第二判断结果表示是,则向超级电容充电管理模块发出控制超级电容放电的控制信号;
170.功率不足告警模块,用于若所述第二判断结果表示否,则发出功率不足告警信号;
171.电池供电模块,用于若所述第一判断结果表示否,则控制所述金属空气电池按照所述功率需求信号输出功率。
172.可选的,所述电池供电模块包括:
173.第三判断单元,用于判断所述金属空气电池的剩余电量是否大于电池电量最低阈值,得到第三判断结果;
174.降功率请求单元,用于若所述第三判断结果表示否,则发出电量不足告警信号,并向无人机飞行控制系统发出降低需求功率的请求;
175.第四判断单元,用于若所述第三判断结果表示是,则根据所述功率需求信号判断所述额定输出功率与所述需求功率的差值是否大于最低预设差值,得到第四判断结果;
176.多余电量处理单元,用于若所述第四判断结果表示是,则根据所述超级电容的剩余电量对所述金属空气电池的输出电量的多余部分进行处理。
177.可选的,所述多余电量处理单元包括:
178.第五判断子单元,用于判断所述超级电容的剩余电量是否大于电容电量最高阈值,得到第五判断结果;
179.电容充电子单元,用于若所述第五判断结果表示否,则控制超级电容充电管理模块将所述金属空气电池的输出电量的多余部分充入所述超级电容。
180.根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明所公开的电动无人机组合供电装置、方法及系统,在无人机有瞬时大功率的需求时,利用超级电容放电提高瞬时输出功率,从而满足无人机瞬时大功率的需求。
181.对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
182.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。