1.本发明涉及图像处理技术领域,具体地涉及一种图像重构方法及装置、图像压缩方法及装置。
背景技术:
2.深空探测能够获得未知领域的信息,由ccd相机或天文望远镜拍摄的深空图像是最直观的信息表示。然而,由于海量数据与相对较窄的信道带宽之间的矛盾,需要对图像进行在轨压缩才能够降低深空通信的难度。深空探测中使用最广泛的图像压缩方法是jpeg/jpeg 2000。jpeg是有损压缩算法,基于离散余弦变换后进行量化,其在中高比特率下具有良好的性能,失真率较低,但在低比特率下失真率较高。
3.为解决上述问题,提出一种基于感兴趣区域的深度图像压缩算法。该算法通过目标识别方法划定感兴趣区域,针对感兴趣区域的频率变换提取更多系数,对非感兴趣区域提取少量系数,以实现低比特率下获得更好的目标影像。然而目标识别的准确率对结果具有影响,如果准确率不佳可能会错过重要目标。
技术实现要素:
4.本发明实施例的目的是提供一种图像重构方法及装置,用以解决现有图像压缩技术(尤其是天文图像压缩技术)中存在的低比特率下失真率较高的问题。
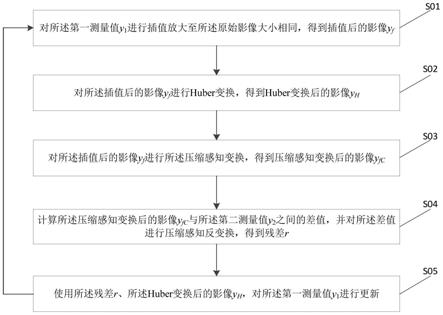
5.为了实现上述目的,本发明实施例提供一种图像重构方法,所述方法包括针对原始影像的测量值,重复执行以下步骤进行迭代运算,直至达到预定迭代次数k后,将第k次更新后的所述第一测量值作为重构影像x,其中所述测量值包括第一测量值y1和第二测量值y2,其中,所述第一测量值y1通过对所述原始影像进行下采样而获得,所述第二测量值y2通过对所述原始影像进行压缩感知变换而获得:对所述第一测量值y1进行插值放大至所述原始影像大小相同,得到插值后的影像y
f
;对所述插值后的影像y
f
进行huber变换,得到huber变换后的影像y
h
;对所述插值后的影像y
f
进行所述压缩感知变换,得到压缩感知变换后的影像y
fc
;计算所述压缩感知变换后的影像y
fc
与所述第二测量值y2之间的差值,并对所述差值进行压缩感知反变换,得到残差r;以及使用所述残差r、所述huber变换后的影像y
h
,对所述第一测量值y1进行更新。
6.可选的,根据以下huber函数得到所述huber变换后的影像y
h
:
[0007][0008]
其中,α为预先设定的huber变换阈值。
[0009]
可选的,对所述第一测量值y1进行更新包括使用梯度下降法对所述第一测量值y1进行更新,包括:根据所述残差r、所述huber变换后的影像y
h
,计算梯度grad;以及使用所述梯度对所述第一测量值y1进行更新。
[0010]
可选的,根据以下公式计算所述梯度grad:
[0011]
grad=y
h
λr
[0012]
和/或根据以下公式对所述第一测量值y1进行更新:
[0013]
y1=y1‑
grad
·
s
[0014]
其中λ为预定的权重系数,s为预定的步长。
[0015]
可选的,所述压缩感知变换为noiselet变换,所述压缩感知反变换为noiselet反变换。
[0016]
相应地,本发明实施例还提供一种图像压缩方法,所述方法包括:使用构建的联合感知矩阵φ,对原始影像进行压缩,得到所述原始影像的测量值,其中所述联合感知矩阵φ包括下采样矩阵和压缩感知变换矩阵。
[0017]
可选的,所述压缩感知变换矩阵为noiselet变换矩阵。
[0018]
相应地,本发明实施例还提供一种图像重构装置,所述装置包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序,以实现上述的图像重构方法。
[0019]
相应地,本发明实施例还提供一种图像压缩装置,所述装置包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序,以实现上述的图像压缩方法。
[0020]
相应地,本发明实施例还提供一种机器可读存储介质,所述机器可读存储介质上存储有指令,该指令用于使得机器执行上述的图像重构方法、和/或上述的图像压缩方法。
[0021]
本发明实施例提供的图像压缩方法,通过联合感知矩阵获取影像压缩数据,使传输数据量大大缩小。基于本发明实施例提供的图像重构方法,针对通过联合感知矩阵获取的影像压缩数据,能够获得与传统jpeg图像峰值信噪比更高的重构图像,并获得更好的视觉效果。所述图像压缩方法和图像重构方法可以适用于天文图像领域,实现天文影像压缩数据的数据量大大缩小,而重构获得的影像比传统jpeg图像峰值信噪比更高,并具有更好的视觉效果。另外所述图像压缩方法和图像重构方法还可以应用于大面阵探测器的海量数据传输。
[0022]
本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
[0023]
附图是用来提供对本发明实施例的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明实施例,但并不构成对本发明实施例的限制。在附图中:
[0024]
图1示出了根据本发明实施例所述的图像重构方法的流程示意图。
[0025]
图2示出了不同α下的huber函数曲线图。
[0026]
图3示出了一原始星云影像。
[0027]
图4示出了针对图3所示的原始星云影像,重构后的星云影像。
[0028]
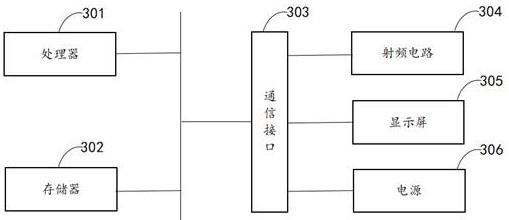
图5示出了本发明一实施例提供的电子设备的结构框图。
具体实施方式
[0029]
以下结合附图对本发明实施例的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明实施例,并不用于限制本发明实施例。
[0030]
基于压缩感知的压缩算法被提出应用于天文图像压缩。压缩感知(compressed sensing,cs)是利用自然信号特有的稀疏性,采样冗余极少,在显著降低采样速率的同时重构出高质量的信号。与传统信号处理中采样过程必须遵守香农采样定理方式相比,压缩感知方法将运算量从信号获取的编码端转移至解码端,这对资源有限的成像技术如遥感等领域具有显著优势,因而也适用于本身具备稀疏性质的天文图像的获取与压缩。
[0031]
图1示出了根据本发明实施例所述的图像重构方法的流程示意图,如图1所示,本发明实施例提供一种图像重构方法,所述方法可以包括针对原始影像的测量值y,重复执行步骤s01
‑
s05进行迭代运算,直至达到预定迭代次数k后,将第k次更新后的所述第一测量值作为重构影像x,其中所述测量值包括第一测量值y1和第二测量值y2,其中,所述第一测量值y1通过对所述原始影像进行下采样而获得,所述第二测量值y2通过对所述原始影像进行压缩感知变换而获得。k为正整数,表示需要迭代的次数,可以根据需要设置为任意合适的值。迭代次数越多,所得到的重构图像质量越高,所需时间成本也会相应提升。因此,设置k值时需要图像质量和时间成本进行平衡。
[0032]
所述原始影像的测量值为对原始影像进行压缩后的数据。可以通过构建联合感知矩阵φ,以获取测量值联合感知矩阵包括下采样矩阵和压缩感知变换矩阵。通过联合感知矩阵φ获取测量值y表示为:
[0033][0034]
其中,φ
c
为压缩感知变换矩阵,φ
d
是下采样矩阵,f为原始影像,y为测量值,y1=φ
d
f,y2=φ
c
f。
[0035]
所述压缩感知变换矩阵φ
c
优选可以为noiselet变换矩阵φ
n
,以方便通过硬件实现测量值y的获取。但是本发明实施例并不限制于此,压缩感知变换矩阵φ
c
也可以是伯努利矩阵、或hadamard矩阵等。
[0036]
s01,对所述第一测量值y1进行插值放大至所述原始影像大小相同,得到插值后的影像y
f
。
[0037]
可以使用任意一种合适的差值方法来执行步骤s03。
[0038]
s02,对所述插值后的影像y
f
进行huber变换,得到huber变换后的影像y
h
。
[0039]
具体可以使用以下huber函数来执行huber变换以得到所述huber变换后的影像y
h
:
[0040][0041]
其中,α为预先设定的huber变换阈值。不同α下的huber函数曲线如图2所示。
[0042]
本发明实施例中,huber函数不限于上述公式,也可以使用其它任意合适的huber
函数来执行huber变换。
[0043]
s03,对所述插值后的影像y
f
进行所述压缩感知变换,得到压缩感知变换后的影像y
fc
。
[0044]
该步骤中使用的压缩感知变换矩阵,与获取第二测量值y2使用的压缩感知变换矩阵相同。
[0045]
s04,计算所述压缩感知变换后的影像y
fc
与所述第二测量值y2之间的差值,并对所述差值进行压缩感知反变换,得到残差r。
[0046]
压缩感知反变换与压缩感知变换相对应。如压缩感知变换为noiselet变换,则压缩感知反变换为noiselet反变换。
[0047]
s05,使用所述残差r、所述huber变换后的影像y
h
,对所述第一测量值y1进行更新。
[0048]
可以使用任一种迭代求解方法来对第一测量值y1进行更新,例如梯度下降法、或l1范数等。
[0049]
优选可以使用梯度下降法对所述第一测量值y1进行更新。
[0050]
首先根据所述残差r、所述huber变换后的影像y
h
,计算梯度grad。具体可以根据以下公式计算所述梯度grad:
[0051]
grad=y
h
λr
ꢀꢀ
(3)
[0052]
其中λ为预定的权重系数,其可以根据需要设置为任意合适的值。
[0053]
然后使用所述梯度对所述第一测量值y1进行更新。具体可以根据以下公式对所述第一测量值y1进行更新:
[0054]
y1=y1‑
grad
·
s
ꢀꢀ
(4)
[0055]
其中s为预定的步长,其可以根据需要设置为任意合适的值,例如可以设置为1。
[0056]
使用更新后的第一测量值,返回执行步骤s01
‑
s05,直至达到预定迭代次数k后,将第k次更新后的所述第一测量值作为重构影像x。
[0057]
相应地,本发明实施例还提供一种图像压缩方法,所述方法包括使用构建的联合感知矩阵φ,对原始影像进行压缩,得到所述原始影像的测量值,其中所述联合感知矩阵φ包括下采样矩阵和压缩感知变换矩阵。
[0058]
所述测量值相应地包括第一测量值y1和第二测量值y2,其中,所述第一测量值y1通过对所述原始影像进行下采样而获得,所述第二测量值y2通过对所述原始影像进行压缩感知变换而获得。
[0059]
构建联合感知矩阵可以构建为其中,φ
c
为压缩感知变换矩阵,φ
d
是下采样矩阵。测量值则y1=φ
d
f,y2=φ
c
f,其中f为原始影像,y为测量值。
[0060]
所述压缩感知变换矩阵φ
c
优选可以为noiselet变换矩阵φ
n
,以方便通过硬件实现测量值y的获取。但是本发明实施例并不限制于此,压缩感知变换矩阵φ
c
也可以是伯努利矩阵、或hadamard矩阵等。
[0061]
下面以对图3所示的原始星云影像进行压缩重构为例对本发明提供的方法进行进一步说明。本实施例中,原始星云影像为512
×
512,参数α=0.01,λ=0.01,s=1,k=50。使
用的压缩感知变换为noiselet变换,压缩感知反变换为noiselet反变换。具体包括以下步骤。
[0062]
s11,原始星云影像拍摄后被通过使用联合感知矩阵进行感知获取测量值所述第一测量y1值通过对所述原始影像进行下采样而获得,所述第二测量值y2通过对所述原始影像进行noiselet变换而获得。本实施例为8倍压缩,原始星云影像经下采样后大小为128
×
128,noiselet变换随机采样个数为16384。所述测量值被传输至图像重构装置,所述图像重构装置基于所述测量值执行图像重构。图像重构装置重复执行以下步骤进行迭代运算,直至达到预定迭代次数50次。
[0063]
s12,对所述第一测量值y1进行插值放大至所述原始影像大小相同,得到插值后的影像y
f
。
[0064]
s13,利用公式(2)对所述插值后的影像y
f
进行huber变换,得到huber变换后的影像y
h
。
[0065]
s14,对所述插值后的影像y
f
进行noiselet变换,得到noiselet变换后的影像y
fn
。即,y
fn
=φ
n
y
f
,其中φ
n
为noiselet变换矩阵。
[0066]
s15,计算所述noiselet变换后的影像y
fn
与所述第二测量值y2之间的差值,并对所述差值进行noiselet反变换,得到残差r。即,其中为noiselet反变换矩阵。
[0067]
s16,利用梯度下降法对第一测量值y1进行更新。首先利用公式(3)计算梯度grad,再利用公式(4)对第一测量值y1进行更新。
[0068]
使用更新后的第一测量值,返回执行步骤s12
‑
s16,直至达到预定迭代次数50次后,将第50次更新后的所述第一测量值作为重构影像x。所述重构影像x如图4所示。
[0069]
本发明实施例提供的图像压缩方法,通过联合感知矩阵获取影像压缩数据,使传输数据量大大缩小。基于本发明实施例提供的图像重构方法,针对通过联合感知矩阵获取的影像压缩数据,能够获得与传统jpeg图像峰值信噪比更高的重构图像,并获得更好的视觉效果。所述图像压缩方法和图像重构方法可以适用于天文图像领域,实现天文影像压缩数据的数据量大大缩小,而重构获得的影像比传统jpeg图像峰值信噪比更高,并具有更好的视觉效果。另外所述图像压缩方法和图像重构方法还可以应用于大面阵探测器的海量数据传输。
[0070]
本发明实施例还提供一种图像重构装置,所述装置包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序,以实现根据任意实施例所述的图像重构方法。
[0071]
本发明实施例还提供一种图像压缩装置,所述装置包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序,以实现根据任意实施例所述的图像压缩方法。
[0072]
处理器中包含内核,由内核去存储器中调取相应的程序单元。内核可以设置一个或以上,通过调整内核参数来执行本发明任意实施例所述的图像重构方法和/或图像压缩方法。
[0073]
存储器可能包括计算机可读介质中的非永久性存储器,随机存取存储器(ram)和/或非易失性内存等形式,如只读存储器(rom)或闪存(flash ram),存储器包括至少一个存储芯片。
[0074]
本发明实施例提供了一种机器可读存储介质,所述机器可读存储介质上存储有指令,该指令用于使得机器执行根据本发明任意实施例所述的图像重构方法和/或图像压缩方法。
[0075]
本发明实施例提供了一种电子设备,如图5所示,电子设备50包括至少一个处理器501、以及与处理器501连接的至少一个存储器502、总线503;其中,处理器501、存储器502通过总线503完成相互间的通信;处理器501用于调用存储器502中的程序指令,以执行根据本发明任意实施例所述的图像重构方法。本发明实施例的电子设备可以是服务器、pc、pad、手机等。
[0076]
本技术还提供了一种计算机程序产品,当在数据处理设备上执行时,适于执行初始化有根据本发明任意实施例所述的图像重构方法步骤的程序。
[0077]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd
‑
rom、光学存储器等)上实施的计算机程序产品的形式。
[0078]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0079]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0080]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0081]
在一个典型的配置中,计算设备包括一个或多个处理器(cpu)、输入/输出接口、网络接口和内存。
[0082]
存储器可能包括计算机可读介质中的非永久性存储器,随机存取存储器(ram)和/或非易失性内存等形式,如只读存储器(rom)或闪存(flash ram)。存储器是计算机可读介质的示例。
[0083]
计算机可读介质包括永久性和非永久性、可移动和非可移动媒体可以由任何方法或技术来实现信息存储。信息可以是计算机可读指令、数据结构、程序的模块或其他数据。
计算机的存储介质的例子包括,但不限于相变内存(pram)、静态随机存取存储器(sram)、动态随机存取存储器(dram)、其他类型的随机存取存储器(ram)、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)、快闪记忆体或其他内存技术、只读光盘只读存储器(cd
‑
rom)、数字多功能光盘(dvd)或其他光学存储、磁盒式磁带,磁带磁磁盘存储或其他磁性存储设备或任何其他非传输介质,可用于存储可以被计算设备访问的信息。按照本文中的界定,计算机可读介质不包括暂存电脑可读媒体(transitory media),如调制的数据信号和载波。
[0084]
还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的过程、方法、商品或者设备中还存在另外的相同要素。
[0085]
以上仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。