1.本实用新型涉及机器人领域,具体地说是一种重心可调的移动机器人。
背景技术:
2.随着科技发展,移动机器人已经在多个领域获得广泛应用,比如电线巡检、货物搬运等。移动机器人通常包括移动底盘、机壳等结构,其中机壳内部可承装电池组及各种控制单元,而机壳上侧可以安装摄像头、检测传感器、照明灯等装置,如公开号为cn111906796a的中国发明专利中就公开了一种变电站巡检机器人,其机壳上侧设有云台,云台上设有高清摄像机、红外摄像机、照明灯等装置,而用于搬运的机器人则在机壳内或机壳上侧可以设置货箱等结构,如公开号为cn111846721a的中国发明专利中公开了一种药房机器人装置,其在移动底盘上设有药库等结构,该专利的药库包括左侧药柜和右侧药柜。由此可见,由于移动机器人应用不同,其移动底盘上侧的结构布局多种多样。
3.而为了保证机器人移动平稳,移动机器人的重心应位于移动底盘的中线上,但由于移动底盘上的模块部件体积大小不同且多为非对称结构,其整体布局很难保证重心位于底盘中线上,为此现有技术中出现了很多重心调整机构,其中比较常见的是驱动配重滑块移动的重心调整机构,如公开号为cn102923204a的中国发明专利中公开了一种多自由度可变重心两轮机器人,其在移动底盘上增加了两个自由度用于改变重心,其中一个自由度为设于机器人上的承载滑块,该专利载物台上设有电机、齿轮、齿条、滑块、导杆等结构,电机通过齿轮齿条驱动滑块沿着导杆移动以实现重心调整,又如授权公开号为cn207710824u的中国实用新型专利中公开了一种安防机器人及其重心调节装置,其包括上下两层且呈十字状布置的第一调节部和第二调节部,每个调节部均设有通过电动推杆驱动的配重块用于调整重心,再如授权公告号为cn208715747u的中国实用新型专利中公开了一种货物搬运机器人重心稳定结构,其通过固定杆、伸缩杆、限位块、伸缩弹簧等配合使,在支撑板的重心发生偏移时对支撑板的重心自动进行被动调整,从而恢复机器人的稳定。
4.但由于移动机器人的功能和结构多种多样,并且机壳内部安装的模块体积和数量也不尽相同,上述各个重心调节机构仅能通过控制配重块的移动距离实现重心调整,或者被动恢复重心,配重块本身重量无法根据实际需要改变,也无法准确判断机器人重心是否正好位于中线上,因此难以根据底盘实际承载情况实现机器人重心的精确调节,需要作出进一步改进。
技术实现要素:
5.本实用新型的目的在于提供一种重心可调的移动机器人,可根据移动机器人整体情况选择合适数量的配重砝码块安装于重心调整机构上用于重心调整,且调整到位后通过减震组件下安装板上的测距传感器及时发出信号控制调节电机停止,从而保证重心位于移动底盘中线上。
6.本实用新型的目的是通过以下技术方案来实现的:
7.一种重心可调的移动机器人,包括移动底盘、减震组件、机壳和两组重心调节机构,其中减震组件设于移动底盘上,机壳和两组重心调节机构均设于减震组件上,且一组重心调节机构设于机壳前端内,另一组重心调节机构设于机壳后端内,所述重心调节机构包括驱动组件、移动座和配重砝码块,所述移动座通过所述驱动组件驱动移动,在所述移动座内设有支撑杆和多个配重槽,且所述支撑杆穿过各个配重槽,所述配重砝码块置于对应的配重槽内且置于所述支撑杆上,所述减震组件包括通过多个弹性支撑件连接的上安装板和下安装板,且所述下安装板的前端和后端均对称设有测距传感器。
8.所述重心调节机构中的驱动组件包括调节电机、丝杠和丝母,且所述调节电机、丝杠以及所述移动座均设于一个底座上,所述底座安装于减震组件上,所述丝杠通过所述调节电机驱动转动,所述移动座内设有丝母套装于所述丝杠上,且所述移动座与所述底座滑动连接。
9.所述底座上设有与所述丝杠平行的导向杆,所述移动座一侧设有导向板套装于所述导向杆上,另外所述底座上设有滑轨,所述移动座下侧设有滑块与所述滑轨配合。
10.所述配重砝码块下侧设有开口,且所述开口扣置于对应配重槽内的支撑杆上。
11.所述配重砝码块呈倒置凹型。
12.所述配重砝码块的高度大于所述移动座上的配重槽深度。
13.所述机壳前后两端均设有取放配重砝码块的开门。
14.所述移动底盘包括承载板、驱动轮、驱动电机和从动轮,其中两个驱动轮分设于承载板一端两侧,两个驱动电机设于承载板一端中部,且所述驱动轮通过对应的驱动电机驱动转动,两个从动轮设于承载板另一端。
15.本实用新型的优点与积极效果为:
16.1、本实用新型的重心调节机构通过移动座带动配重砝码块移动调整机器人重心,并且可以根据移动机器人整体情况选择合适数量的配重砝码块,使用更加灵活。
17.2、本实用新型利用减震组件下安装板上的测距传感器实时检测与上安装板之间的距离,当对称的两个测距传感器检测距离值相等时即意味机器人两侧平衡,从而确保机器人重心位于移动底盘中线上。
18.3、本实用新型在机壳的前端内和的后端内各设有一组重心调节机构,以保证机器人前端和后端平衡,进一步确保重心调整准确。
19.4、本实用新型在机壳前后端均设有开门方便取放配重砝码块。
20.5、本实用新型的重心调节机构整体设于一个底座上,方便整体安装,不需要时也方便整体拆卸转移。
附图说明
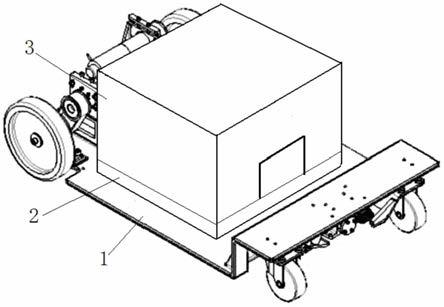
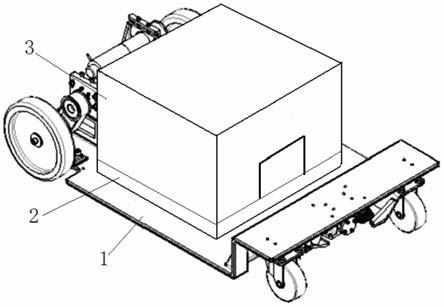
21.图1为本实用新型的整体示意图,
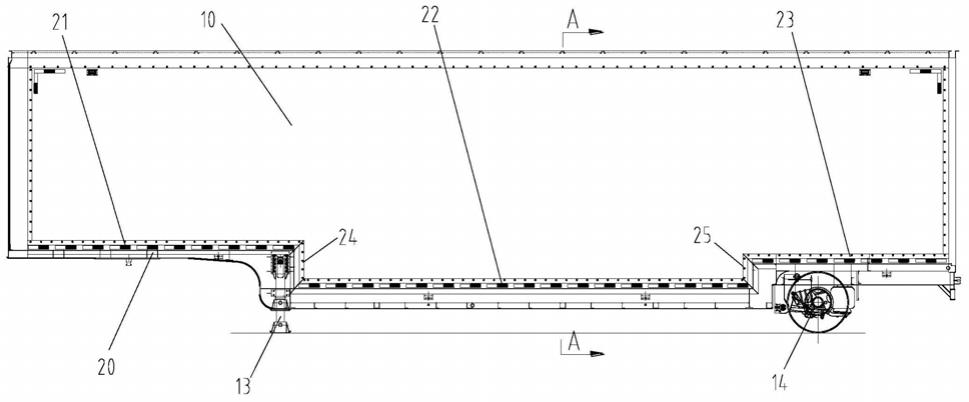
22.图2为图1中的移动底盘示意图,
23.图3为图1中机壳内部的重心调节机构布局示意图,
24.图4为图3中的重心调节机构主视图,
25.图5为图4中的重心调节机构俯视图,
26.图6为图4中的配重砝码块主视图,
27.图7为图3中的重心调节机构移动座设有扣合压盖的示意图,
28.图8为图1中的减震组件示意图,
29.图9为图8中的减震组件主视图。
30.其中,1为移动底盘,101为承载板,102为驱动轮,103为驱动电机架,104为驱动电机,105为从动轮,2为减震组件,201为上安装板,202为下安装板,203为弹性支撑件,204为测距传感器,205为减震支撑件,3为机壳,4为重心调节机构,401为调节电机,402为丝杠,403为移动座,4031为配重槽,4032为导向板,404为底座,405为配重砝码块,4051为开口,406为支撑杆,407为导向杆,408为扣合压盖。
具体实施方式
31.下面结合附图对本实用新型作进一步详述。
32.如图1~9所示,本实用新型包括移动底盘1、减震组件2、机壳3和两组重心调节机构4,其中减震组件2设于移动底盘1上,机壳3和两组重心调节机构4均设于减震组件2上,且一组重心调节机构4设于机壳3前端内,另一组重心调节机构4设于机壳3后端内,如图4~6所示,所述重心调节机构4包括驱动组件、移动座403和配重砝码块405,所述移动座403通过所述驱动组件驱动移动,在所述移动座403内设有支撑杆406和多个配重槽4031,且所述支撑杆406穿过各个配重槽4031,所述配重砝码块405整体呈倒置凹型,其下侧设有开口4051,所述配重砝码块405置于对应的配重槽4031内且开口4051扣置于所述支撑杆406上,如图8~9所示,所述减震组件2包括上安装板201和下安装板202,且所述上安装板201和下安装板202之间通过多个弹性支撑件203连接,所述重心调节机构4和机壳3均安装于所述上安装板201上,在所述下安装板202的前端和后端均以移动底盘1中线为对称轴线对称设有两个测距传感器204。
33.如图4所示,本实施例中,所述重心调节机构4中的驱动组件包括调节电机401、丝杠402和丝母,其中所述调节电机401、丝杠402以及所述移动座403均设于一个底座404上,所述底座404安装于减震组件2的上安装板201上,所述丝杠402通过所述调节电机401驱动转动,所述移动座403内设有丝母套装于所述丝杠402上,且所述移动座403与所述底座404滑动连接。机构工作时,调节电机401驱动丝杠402转动,进而驱动所述移动座403移动,当下安装板202前端两个测距传感器204检测与上安装板201距离h1、h2相等,同时后端两个测距传感器204检测与上安装板201距离也相等时,控制系统收到信号控制所述调节电机401停止。
34.如图5所示,所述底座404上设有与所述丝杠402平行的导向杆407,所述移动座403一侧设有导向板4032套装于所述导向杆407上,从而实现移动座403的移动导向。另外所述底座404上设有滑轨,所述移动座403下侧设有滑块与所述滑轨配合,在实现移动座403和底座404滑动连接的同时,也可以辅助移动座403移动导向,进一步确保移动座403直线移动。
35.如图4所示,所述配重砝码块405的高度大于所述移动座403上的配重槽4031深度,这样所述配重砝码块405上端高出的部分方便操作人员取放。各个配重砝码块405可设计成同样重量,也可以设计成类似天秤砝码那样的不同规格重量。另外为了避免路面路况较差过于颠簸导致配重砝码块405蹦出配重槽4031,如图7所示,也可以根据需要在所述移动座403上加设扣合压盖408盖住配重砝码块405,以防止其蹦出,本实施例中,所述扣合压盖408
一端与移动座403铰接,另一端通过螺栓螺母等方式与移动座403固连,但一般正常路面行驶时,由于配重砝码块405自身重量限制不会出现上述蹦出情况。
36.如图2所示,本实施例中,所述移动底盘1包括承载板101、驱动轮102、驱动电机104和从动轮105,其中两个驱动轮102分设于承载板101一端两侧,两个驱动电机104设于承载板101一端中部,且所述驱动轮102通过对应的驱动电机104驱动转动,本实施例中,所述驱动电机104通过传动皮带组件传递转矩,以保证两个驱动轮102同轴,两个从动轮105设于承载板101另一端。
37.如图8~9所示,所述减震组件2的下安装板202中部设有多组减震支撑件205以更好地实现减震效果,本实施例中的减震组件2与授权公告号为cn211343849u专利中的减震装置相同。
38.所述机壳3前后两端均设有开门,打开所述开门,即可向相应侧的重心调节机构4上取放配重砝码块405,然后将所述开门关闭锁定。
39.本实用新型的工作原理为:
40.本实用新型工作时,首先根据机壳3内的模块情况以及机壳3上侧的结构情况选择合适数量的配重砝码块405,各个配重砝码块405可设计成同样重量,也可以设计成类似天秤砝码那样的不同规格重量,在机壳3前后两端均设有开门,打开所述开门,即可向相应侧的重心调节机构4上取放配重砝码块405,配重砝码块405放好后关闭开门,然后重心调节机构4中的调节电机401启动驱动移动座403移动调整机器人重心。
41.如图3所示,本实用新型在机壳3前端内和后端内各设有一组重心调节机构4,以保证机器人前端和后端均达到平衡,另外本实用新型采用类似天秤的原理确保机器人重心在中线上,如图8所示,当减震组件2的下安装板202前端两个测距传感器204检测与上安装板201距离h1、h2相等,同时后端两个测距传感器204检测与上安装板201距离也相等时,此时机器人前端和后端两侧重量达到平衡,机器人重心即位于移动底盘1中线上,测距传感器204发出信号给控制系统,控制系统控制调节电机401停止转动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。