1.本实用新型涉及机器人码垛技术领域,特别地涉及一种空调机码垛夹具。
背景技术:
2.目前,行业内很多空调机型下线码垛都已经实现机器人自动码垛,但是对于一些大型、重型的机型,因其自身重量大,一般的码垛夹具很难稳定地夹抱大型的空调机,进而难以实现自动下线码垛。
3.随着自动化的推广,为了实现大型空调机的自动码垛,需要设计一种码垛夹具,通过该夹具来稳定夹抱大型的空调机,以实现自动码垛。同时,在机器人自动码垛系统中,该大型机夹具可以与其他小型机的夹具快速、自动切换,有效提高生产效率。
技术实现要素:
4.针对上述现有技术中的问题,本技术提出了一种空调机码垛夹具,其夹紧部件能够保证体积、重量均较大的大型空调机通过夹具夹抱的稳定性,实现基于码垛机器人的自动夹取码垛。
5.本实用新型的一种空调机码垛夹具,包括:
6.货叉部件,所述货叉部件呈l形,其包括相互垂直的承载部与支撑部;
7.夹紧部件,所述夹紧部件包括滑轨组件、设置在所述滑轨组件两端的两个夹紧组件以及能够驱动所述夹紧组件沿所述滑轨组件滑动的驱动组件,所述滑轨组件垂直地固定在所述支撑部上;
8.其中,所述承载部、所述滑轨组件以及所述两个夹紧组件围成放置空调机的承载空间,所述夹紧组件能够通过滑动来改变所述承载空间的大小。
9.在一个实施方式中,其特征在于,所述夹紧组件包括:
10.连接板,所述连接板的一侧表面上设置有配合所述滑轨组件的滑块,所述连接板连接所述驱动组件;
11.夹板,所述夹板固定在所述连接板上,且所述夹板垂直于所述滑轨组件所在平面。
12.在一个实施方式中,所述夹紧组件还包括:
13.调整板,所述调整板设置在所述夹板的内侧表面上并平行于所述夹板,其能够在所述夹板的表面上沿远离或靠近所述连接板的方向滑动;
14.限位板,所述限位板垂直地固定在所述调整板的内侧表面上,其能够扣住空调机的外表面以固定空调机。
15.通过本实施方式,限位板能够扣住空调机的前侧表面,进而对空调机在远离滑轨组件的前侧进行限位,实现空调机在前后方向上位置的相对固定。
16.在一个实施方式中,所述调整板上开设有多个长条形的滑槽,所述夹板的表面上设置有与所述滑槽对应配合的卡块。
17.在一个实施方式中,所述限位板位于所述调整板上远离所述连接板的一侧边缘
处。通过本实施方式,限位板位于调整板的最外端,在夹抱空调机时,限位板往外的位置再无夹具的其他部件,使夹具结构更紧凑。
18.在一个实施方式中,所述连接板的设置有所述滑块的表面上还设置有用于连接所述驱动组件的连接块。通过本实施方式,由于连接板的位置与支撑部相互错开,进而在连接板靠近支撑部的一侧表面上设置连接块,使连接块的位置对应支撑部,可以方便驱动组件的安装。
19.在一个实施方式中,所述驱动组件采用气缸,所述气缸底部一端固定在所述支撑部上、伸缩一端通过浮动接头连接所述连接块。
20.在一个实施方式中,所述滑轨组件包括两个相互平行的直线滑轨,所述两个直线滑轨分别靠近所述支撑部的上部与下部。通过本实施方式,两个直线滑轨组成滑轨组件,这样夹紧组件同时与两个直线滑轨配合,可以提高结构稳定性。
21.在一个实施方式中,所述支撑部的顶部设置有安装板,所述安装板上设置有快速换模子模块,所述快速换模子模块能够与码垛机器人上的快速换模母模块对接。通过本实施方式,安装板上的快速换模子模块能够快速对接码垛机器人上的快速换模母模块,进而实现夹具的快速切换。
22.上述技术特征可以各种适合的方式组合或由等效的技术特征来替代,只要能够达到本实用新型的目的。
23.本实用新型提供的一种空调机码垛夹具,与现有技术相比,至少具备有以下有益效果:
24.本实用新型的一种空调机码垛夹具,相较于常规的货叉,进一步具有夹紧部件,夹紧部件中的夹紧组件能够夹紧空调机的两侧,进而保证体积、重量均较大的大型空调机在夹具上的稳定性,从而实现大型空调机通过码垛机器人的自动夹取码垛。同时,夹紧组件可以沿夹紧部件中的滑轨组件滑动来调整位置,进而能够适应不同大小的大型空调机,扩大夹具的适用范围。
附图说明
25.在下文中将基于实施例并参考附图来对本实用新型进行更详细的描述。其中:
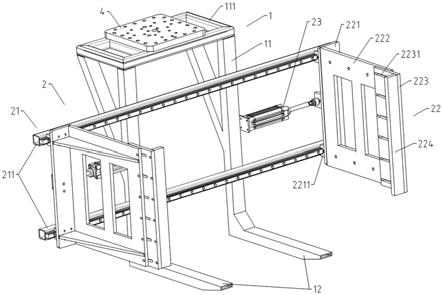
26.图1显示了本实用新型的夹具的结构示意图;
27.图2显示了本实用新型的夹具夹取空调时的示意图;
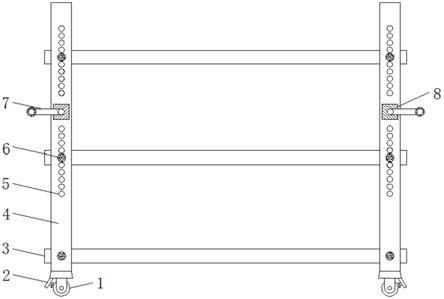
28.图3显示了本实用新型的夹具放置在放置架上时的示意图。
29.在附图中,相同的部件使用相同的附图标记。附图并未按照实际的比例。
30.附图标记:
[0031]1‑
货叉部件,11
‑
支撑部,111
‑
安装板,12
‑
承载部,2
‑
夹紧部件,21
‑
滑轨组件, 211
‑
直线滑轨,22
‑
夹紧组件,221
‑
连接板,2211
‑
滑块,2212
‑
连接块,222
‑
夹板, 223
‑
调整板,2231
‑
滑槽,224
‑
限位板,23
‑
驱动组件,3
‑
浮动接头,4
‑
快速换模子模块,5
‑
空调机,6
‑
放置架。
具体实施方式
[0032]
下面将结合附图对本实用新型作进一步说明。
[0033]
本实用新型提供了一种空调机码垛夹具,包括:
[0034]
货叉部件1,货叉部件1呈l形,其包括相互垂直的承载部12与支撑部11;
[0035]
夹紧部件2,夹紧部件2包括滑轨组件21、设置在滑轨组件21两端的两个夹紧组件22以及能够驱动夹紧组件22沿滑轨组件21滑动的驱动组件23,滑轨组件21垂直地固定在支撑部11上;
[0036]
其中,承载部12、滑轨组件21以及两个夹紧组件22围成放置空调机的承载空间,夹紧组件22能够通过滑动来改变承载空间的大小。
[0037]
具体地,如附图图1与图2所示,货叉部件1的结构与现有的货叉结构相似,夹紧部件2中的滑轨组件21固定设置在货叉部件1的支撑部11上。驱动组件23 一端连接在支撑部11上、另一端连接夹紧组件22。
[0038]
进行大型空调机5码垛时,码垛机器人运转并通过夹具夹抱目标空调机5,货叉部件1的承载部12穿入至空调机5的底部,并使空调机5连同底部的叉板整体进入夹具上的承载空间中;而后驱动组件23运作,使两个夹紧组件22沿滑轨组件21滑动至分别紧贴空调机5的两侧,保证空调机5在左右方向上位置的相对固定;最后码垛机器人向上抬起夹具,即可抱起空调机5进行码垛。
[0039]
相较于常规的货叉,本实施例中的码垛夹具进一步具有夹紧部件,夹紧部件中的夹紧组件能够夹紧空调机的两侧,进而保证体积、重量均较大的大型空调机在夹具上的稳定性,避免空调机发生晃动甚至掉落,实现大型空调机通过码垛机器人的自动夹取码垛。同时,夹紧组件可以沿夹紧部件中的滑轨组件滑动来调整位置,进而能够适应不同大小的大型空调机。
[0040]
优选地,滑轨组件21包括两个相互平行的直线滑轨211,两个直线滑轨211 分别靠近支撑部11的上部与下部。
[0041]
具体地,如附图图1所示,两个直线滑轨211组成滑轨组件21,这样夹紧组件22同时与两个直线滑轨211配合,可以提高结构稳定性。
[0042]
在一个实施例中,夹紧组件22包括:
[0043]
连接板221,连接板221的一侧表面上设置有配合滑轨组件21的滑块2211,连接板221连接驱动组件23;
[0044]
夹板222,夹板222固定在连接板221上,且夹板222垂直于滑轨组件21所在平面。
[0045]
具体地,如附图图1所示,连接板221通过滑块2211与滑轨组件21配合并实现相对滑动,驱动组件23与连接板221连接,通过推动连接板221来实现夹紧组件22整体相对滑轨组件21的滑动。夹板222垂直于滑轨组件21所在平面,进而在空调机5放置在承载空间中时,夹板222表面能够与紧贴空调机5的侧面,保证空调机5左右方向上位置的相对固定。
[0046]
在一个实施例中,夹紧组件22还包括:
[0047]
调整板223,调整板223设置在夹板222的内侧表面上并平行于夹板222,其能够在夹板222的表面上沿远离或靠近连接板221的方向滑动;
[0048]
限位板224,限位板224垂直地固定在调整板223的内侧表面上,其能够扣住空调机的外表面以固定空调机。
[0049]
具体地,如附图图1与图2所示,在空调机5放置到承载空间中后,限位板 224扣住空调机5的该前侧表面,调整板223与限位板224的整体结构能够对空调机5在远离滑轨组件
21的前侧进行限位。进而在通过夹板222实现空调机5 左右方向上位置的相对固定的基础上,进一步通过限位板224实现空调机5在前后方向上位置的相对固定。
[0050]
此外,调整板223的位置可以相对夹板222滑动,进而可以调整承载空间在前后方向上的尺寸大小,从而适应不同尺寸的空调机5。同时,也可以调整限位板224扣住空调机5表面的松紧程度,避免限位板224太松导致空调机5晃动或者太紧导致空调机5表面损坏。
[0051]
优选地,限位板224位于调整板223上远离连接板221的一侧边缘处。
[0052]
具体地,如附图图1与图2所示,限位板224位于调整板223的边缘处,即限位板224位于调整板223的最外端,在夹抱空调机5时,限位板224往外的位置再无夹具的其他部件,使夹具结构更紧凑。
[0053]
在一个实施例中,调整板223上开设有多个长条形的滑槽2231,夹板222的表面上设置有与滑槽2231对应配合的卡块。
[0054]
在一个实施例中,连接板221的设置有滑块2211的表面上还设置有用于连接驱动组件23的连接块2212。
[0055]
具体地,如附图图1与图2所示,由于连接板221的位置与支撑部11相互错开,进而在连接板221靠近支撑部11的一侧表面上设置连接块2212,使连接块2212的位置对应支撑部11,可以方便驱动组件23的安装。
[0056]
在一个实施例中,驱动组件23采用气缸,气缸底部一端固定在支撑部11上、伸缩一端通过浮动接头3连接连接块2212。
[0057]
具体地,气缸是常用的一种驱动装置,技术成熟、性能可靠,同时具有较低的成本。驱动组件23也可以采用其他具体相同功能的装置,例如电动推杆。
[0058]
在一个实施例中,支撑部11的顶部设置有安装板111,安装板111上设置有快速换模子模块4,快速换模子模块4能够与码垛机器人上的快速换模母模块对接。
[0059]
具体地,如附图图3所示,安装板111上的快速换模子模块4能够快速对接码垛机器人上的快速换模母模块,进而实现夹具的快速切换。夹具在未使用时按预设姿态放置在放置架6上,如附图图3所示,以方便与码垛机器人的快速、准确对接。
[0060]
本实用新型的夹具基于码垛机器人以及控制系统,码垛机器人通过控制系统控制。当空调机进入定点位置后,传感器感应到空调机,即传递信号给码垛机器人,码垛机器人即可控制夹具动作。夹具移动到夹抱位置,伸缩气缸收缩,两个夹板夹住空调机并通过限位板勾出空调机,然后将空调机夹抱转移至下线处。当需要切换其他型号夹具时,控制系统控制码垛机器人的快速换模母模块与夹具的快速换模子模块快速分离,并随之与另一个夹具的快速换模子模块快速对接,完成夹具的快速切换。
[0061]
在本实用新型的描述中,需要理解的是,术语“上”、“下”、“底”、“顶”、“前”、“后”、“内”、“外”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0062]
虽然在本文中参照了特定的实施方式来描述本实用新型,但是应该理解的是,这些实施例仅仅是本实用新型的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本实用新型的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合
不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。