1.本发明涉及装载有快速响应制动能力的整车系统领域。具体而言,本发明涉及一种智能驾驶车辆制动延时改善系统和方法。
背景技术:
2.当代的车辆技术发展可谓一日千里。世界多国均对智能驾驶制定了多项相关政策,以促进智能驾驶车辆与现有交通系统的融合,并鼓励智能驾驶技术的发展。作为智能驾驶level 2的重要组成部分,自动紧急制动(aeb)系统在防止车辆碰撞、保护行人、驾驶员方面有着巨大的作用。随着智能驾驶技术的迅猛发展,今后车辆越来越多的控制权会交给车载控制单元,那些对安全性能要求极高的功能比如aeb显的至关重要,紧急情况下的制动直接关系到整车安全,因此,对安全的每一点提升都值得花精力去研究。由于传统制动系统从接收到制动信号到产生制动效果、产生制动力存在一定的延时,制动时车速越高该延时造成的影响越大。我们都知道,电动机对于响应的速度远远大于机械结构,因此本方案借助混合动力(纯电动)车辆的电动机,在制动时向电动机发送倒拖扭矩请求,使其扭矩作用于传动系形成与前进方向相反的扭矩,同时加上传统机械制动系统通过制动卡钳或者制动鼓作用于车轮的制动扭矩,迅速实现对车轮的最大制动能力,从而提高制动效能,避免紧急情况下的碰撞。
技术实现要素:
3.有鉴于此,本发明提供了一种智能驾驶车辆制动延时改善系统和方法。本发明结合了智能驾驶领域与新能源技术中的新制动方式,提出了智能驾驶车辆中具有制动功能的一种扭矩分配策略,既提高了紧急制动的性能又作为能量回收,提高了整车经济性。
4.实现以上目的的一个或多个,本发明提供以下技术方案。
5.根据本发明的第一方面,提供一种智能驾驶车辆制动延时改善方法,其包括如下步骤:检测所述智能驾驶车辆的制动环境;根据所述制动环境判断是否启动自动制动模式;在启动自动制动模式的情况下,向电动机发送倒拖扭矩请求并且控制所述智能驾驶车辆进行倒拖制动;以及在启动自动制动模式的情况下,同时发送制动请求并且启动机械制动。
6.根据本发明一实施例的方法,其中,所述方法进一步包括以下步骤:获取所述智能驾驶车辆的前车车距,并根据所述制动环境判断所述智能驾驶车辆的安全车距。
7.根据本发明另一实施例或以上任一实施例的方法,其中所述方法进一步包括以下步骤:当所述前车车距小于所述安全车距时,启动所述自动制动模式,直至所述前车车距等于所述安全车距。
8.根据本发明另一实施例或以上任一实施例的方法,其中所述方法进一步包括以下步骤:获取所述智能驾驶车辆的当前减速度,并根据所述制动环境判断所述智能驾驶车辆的安全减速度。
9.根据本发明另一实施例或以上任一实施例的方法,其中所述方法进一步包括以下
步骤:当所述当前减速度小于所述安全减车速时,启动所述自动制动模式,直至所述当前减速度等于所述安全减速度。
10.根据本发明另一实施例或以上任一实施例的方法,其中所述方法进一步包括以下步骤:当向所述电机发出所述倒拖扭矩请求时,计算所需制动扭矩并且将所述所需制动扭矩发送给所述电动机。
11.根据本发明另一实施例或以上任一实施例的方法,其中所述方法进一步包括以下步骤:实时监控所述智能驾驶车辆的驱动轮的滑移率以及abs状态,如果所述abs状态被激活,则制动效能以达最大。
12.根据本发明另一实施例或以上任一实施例的方法,其中,所述所需制动扭矩不超过abs使能时刻的值。
13.根据本发明另一实施例或以上任一实施例的方法,其中,所述自动制动模式包括紧急制动模式。
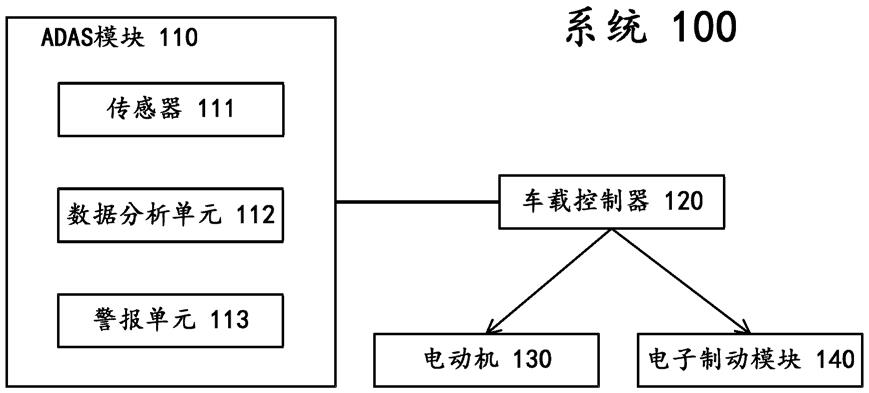
14.根据本发明的第二方面,提供一种智能驾驶车辆制动延时改善系统,其包括adas模块、车载控制器、电子制动控制模块以及电动机;其中,所述车载控制器配置成在启动自动制动模式的情况下,向电动机发送倒拖扭矩请求并且控制所述智能驾驶车辆进行倒拖制动;以及在启动自动制动模式的情况下,同时向电子制动控制模块发送制动请求并且启动机械制动。
15.根据本发明一实施例的系统,其中,所述adas模块包括至少一个传感器、数据分析单元以及警报单元;其中所述至少一个传感器配置成检测所述智能驾驶车辆的制动环境;所述数据分析单元配置成根据所述制动环境判断是否启动自动制动模式;所述警报单元配置成在启动所述自动制动模式的情况下,进行警报提醒。
16.根据本发明另一实施例或以上任一实施例的系统,其中,所述制动环境包括所述智能驾驶车辆的前车车距和当前减速度。
17.根据本发明另一实施例或以上任一实施例的系统,其中,所述数据分析单元进一步配置成根据所述制动环境判断所述智能驾驶车辆的安全车距,当所述前车车距小于所述安全车距时,启动所述自动制动模式,直至所述前车车距等于所述安全车距。
18.根据本发明另一实施例或以上任一实施例的系统,其中,所述数据分析单元进一步配置成根据所述制动环境判断所述智能驾驶车辆的安全减速度,当所述当前减速度小于所述安全减车速时,启动所述自动制动模式,直至所述当前减速度等于所述安全减速度。
19.根据本发明另一实施例或以上任一实施例的系统,其中,所述车载控制器进一步配置成向所述电机发出所述倒拖扭矩请求时,根据所述安全减速度、当前挡位、当前减速度、制动压力等信息计算所需制动扭矩,并且将所述所需制动扭矩发送给所述电动机。
20.根据本发明另一实施例或以上任一实施例的系统,其中,所述系统进一步包括abs模块,所述abs模块配置成实时监控所述智能驾驶车辆的驱动轮的滑移率以及abs状态,如果所述abs状态被激活,则制动效能以达最大。
21.根据本发明另一实施例或以上任一实施例的系统,其中,所述所需制动扭矩不超过abs使能时刻的值。
22.根据本发明另一实施例或以上任一实施例的系统,其中,所述自动制动模式包括
紧急制动模式。
23.根据本发明的智能驾驶车辆制动延时改善系统和方法的主要参考数据来源于各个传感器的反馈,由于传感器的反馈存在一定的延时与误差,因此会造成计算结果偏差。另外,由于电动机的反作用力及机械制动系统的制动力迅速施加于车轮,可能会造成制动防抱死系统(abs)的介入,在abs介入时,整车会对施加于制动系统的请求进行限制,不会对车辆安全造成影响。
24.根据本发明的智能驾驶车辆制动延时改善系统和方法的第一方面的优点在于:本方案借助于电动车辆或混合动力车辆的电动机,在启动自动制动模式的情况下,向电动机发送倒拖扭矩请求,使其扭矩作用于传动系形成与前进方向相反的扭矩,同时向传统机械制动系统发送制动请求并且启动机械制动,通过制动设备作用于车轮的制动扭矩。通过电动机产生的倒拖扭矩与制动系统产生的制动力的加和代替传统机械制动系统的单一制动,从而迅速实现对车轮的最大制动能力,减少了制动延时,提高了制动效能,避免紧急情况下的碰撞。
25.根据本发明的智能驾驶车辆制动延时改善系统和方法的第二方面的优点在于:本发明的制动方法包括防抱死系统(abs)的介入,从而避免了在倒拖制动过程中的抱死风险,提高了驾驶的安全性。
26.根据本发明的智能驾驶车辆制动延时改善系统和方法的相对于申请号为cn201910551688.5的名称为“一种面向自动驾驶与智能辅助驾驶的汽车线控制动控制系统及其控制方法”的发明专利在计算方法上与本方案有较大差别,该发明专利在计算扭矩分配方案时没有考虑原来制动系统所产生的效果。
27.根据本发明的智能驾驶车辆制动延时改善系统和方法的相对于申请号为cn201811101742.8的名称为“一种adas系统的控制方法、装置、设备及网络设备”的发明专利的控制策略有较大区别,该专利仅陈述了根据规定路线与实际路线偏差形成的控制方法,其控制为宏观全局控制,对于精确度较高、实时性要求高的场景并不适用。
28.根据本发明的智能驾驶车辆制动延时改善系统和方法的相对于申请号为cn201810243184.2的名称为“汽车扭矩分配方法、装置及系统”的发明专利的方案有较大区别,该专利针对制动时的减速度对能量回收需求的制动扭矩进行调节,保证相同制动踏板开度下的制动减速度相同,该专利必须有制动踏板的触发,其主要作用是调节制动扭矩使驾驶员感觉刹车舒适,使驾驶员感觉上与传统车没有区别,与本专利的实用条件、技术方案均有较大区别。
附图说明
29.本发明的上述和/或其它方面和优点将通过以下结合附图的各个方面的描述变得更加清晰和更容易理解,附图中相同或相似的单元采用相同的标号表示。附图包括:图1为根据本发明一实施例的智能驾驶车辆制动延时改善系统100的示意性框图;图2为根据本发明一实施例的制动系统响应示意图;图3为根据本发明一实施例的智能驾驶车辆制动延时改善方法200的示意性流程图。
具体实施方式
30.在本说明书中,参照其中图示了本发明示意性实施例的附图更为全面地说明本发明。但本发明可以按不同形式来实现,而不应解读为仅限于本文给出的各实施例。给出的各实施例旨在使本文的披露全面完整,以将本发明的保护范围更为全面地传达给本领域技术人员。
31.诸如“包含”和“包括”之类的用语表示除了具有在说明书和权利要求书中有直接和明确表述的单元和步骤以外,本发明的技术方案也不排除具有未被直接或明确表述的其它单元和步骤的情形。诸如“第一”和“第二”之类的用语并不表示单元在时间、空间、大小等方面的顺序而仅仅是作区分各单元之用。
32.下文参考根据本发明实施例的方法和系统的流程图说明、框图和/或流程图来描述本发明。将理解这些流程图说明和/或框图的每个框、以及流程图说明和/或框图的组合可以由计算机程序指令来实现。可以将这些计算机程序指令提供给通用计算机、专用计算机或其它可编程数据处理设备的处理器以构成机器,以便由计算机或其它可编程数据处理设备的处理器执行的这些指令创建用于实施这些流程图和/或框和/或一个或多个流程框图中指定的功能/操作的部件。
33.可以将这些计算机程序指令加载到计算机或其它可编程数据处理器上以使一系列的操作步骤在计算机或其它可编程处理器上执行,以便构成计算机实现的进程,以使计算机或其它可编程数据处理器上执行的这些指令提供用于实施此流程图和/或框图的一个或多个框中指定的功能或操作的步骤。还应该注意在一些备选实现中,框中所示的功能/操作可以不按流程图所示的次序来发生。例如,依次示出的两个框实际可以基本同时地执行或这些框有时可以按逆序执行,具体取决于所涉及的功能/操作。
34.现在参考图1,图1为根据本发明一实施例的智能驾驶车辆制动延时改善系统100的示意性框图。延时改善系统100包括adas模块110、车载控制器120、电子制动控制模块140以及电动机130。系统100可以通过lin(local interconnect network,局域互联网络)总线、can(controller area network,控制局域网络)总线、硬件等实现智能驾驶车辆的分布式电子系统控制、智能驾驶车辆的电动机控制管理以及各个传感器等的连接和通信。
35.根据本实施例的adas模块110包括至少一个传感器111、数据分析单元112以及警报单元113。其中,传感器111配置成检测智能驾驶车辆的制动环境,诸如车辆位置、与前车或者障碍物的距离、车辆的速度以及减速度等,并将检测到的信息传送到数据分析单元112。数据分析单元112配置成根据由传感器111提供的制动环境信息判断智能驾驶车辆的安全车距。当车辆的前车车距小于系统安全车距时,数据分析单元112将启动自动制动模式(包括但不限于紧急制动模式),直至该车辆的前车车距等于安全车距时,关闭自动制动模式。数据分析单元112可以进一步配置成根据由传感器111提供的制动环境信息判断智能驾驶车辆的安全减速度。当该车辆的当前减速度小于安全减车速时,数据分析单元112也将启动自动制动模式(包括但不限于紧急制动模式),直至该车辆的当前减速度等于安全减速度时,关闭自动制动模式。警报单元113可以配置成在启动自动制动模式的情况下,进行警报提醒,还可以进一步将警报提醒信息显示在警报显示器或车辆控制面板上。
36.车载控制器120可以配置成在启动自动制动模式的情况下,向电动机发送倒拖扭矩请求,并且可以根据传感器111反馈的车辆的安全减速度、当前挡位、当前减速度、制动压
力等制动环境信息计算所需制动扭矩,并且将该所需制动扭矩发送给电动机130并且控制该智能驾驶车辆进行倒拖制动。车载控制器120可以进一步配置成在启动自动制动模式的情况下,同时向电子制动控制模块140发送制动请求并且启动机械制动。
37.根据本发明一实施例的智能驾驶车辆制动延时改善系统100还可以包括abs模块。所述abs模块可以配置成实时监控智能驾驶车辆的驱动轮的滑移率以及abs状态,并且自动控制制动力的大小以使得车轮不被抱死,从而处于边滚边滑(例如,滑移率在20%左右)的状态,以保证车轮与地面的附着力在最大值。如果所述abs状态被激活,则制动效能以达最大。此外,所需制动扭矩的值不应超过abs使能时刻的值。
38.现在参考图2,图2为根据本发明一实施例的制动系统响应示意图。车辆的自动制动过程一般分为以下几个阶段:第一阶段,车载控制器向电子制动模块发发送制动请求;第二阶段,电子制动模块延时响应;第三阶段,逐步建立制动效力;第四阶段,车辆以最大制动能力持续制动。
39.在这个几个阶段的实施过程中,电子制动模块响应(一般在200ms左右)及制动效力建立(一般在500ms左右)所消耗的时间对整个制动效果有极大的影响。如果响应时间太长则将大大降低制动效果,导致车辆碰撞。根据本发明的方法,由于电动机从接收到车载控制器发送的倒拖扭矩请求到扭矩响应极为迅速(响应时间约为毫秒级别),如图1所示,本方案提出了一种自动制动工况下的电动机扭矩响应策略,实现电动机倒拖扭矩加机械制动系统的双重制动力响应,加速实现最大制动力效果,缩减制动距离,达到避免或者减缓碰撞的目的传统的机械制动过程如图2中a、b所示。首先,车辆的车载控制器在t0时刻向电子制动模块发送制动请求,经历一定的延时后,电子制动模块接收到制动请求,并在又一延时后开始建立制动力。该制动力在经历另一延时后于t1时刻使车轮产生减速度。从发送制动信号到产生制动效果有一个延时的过程,如图2中t
0-t1所示,该延时可能来自传统机械结构的响应、制动压力建立、制动盘(鼓)间隙的消除等,并且,这个延时只可能减小而不可能消除。其次,制动效果由产生到最大的过程为t
1-t2,本如图2中b、c所示。根据本发明的技术方案要解决的问题是在该延时时间过程中,优化扭矩控制策略,短时间内增大制动效果,从而将制动最大响应时间δt(即,t
2-t0)缩短(如图2中d所示)。
40.现在参考图3,图3为根据本发明一实施例的智能驾驶车辆制动延时改善方法200的示意性流程图。如图所示,在步骤s301中,由传感器检测智能驾驶车辆的制动环境。在步骤s302中,数据分析单元根据制动环境判断是否启动自动制动模式。在步骤s303中,数据分析单元判断车辆的安全减速度。
41.其中根据车辆动力学公式:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中为滚动阻力、为空气阻力、为坡道阻力、为加速阻力、为旋转质量系数。
42.ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)为安全减速度,由车载控制器根据本车与前车相对关系计算所得,目标加速阻力,其来源包括电动机产生的倒拖扭矩与制动系统产生的制动力。
43.公式(2)减公式(1)即减速度变化,该差值由驱动电机的倒拖扭矩及制动系统作用
引起(初始时刻电子制动模块仍未发挥制动作用),因此初始时刻发出的制动力为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)其中为制动系统实时产生的减速度,可通过试验得到制动压力与减速度一一对应关系。
44.所需制动扭矩可由以下公式计算得出:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)其中为所需制动扭矩、为变速器传动比、为主减速器传动比、为车轮半径。
45.所需制动扭矩以保证车辆行驶稳定要求的最大扭矩变化速率发送给电动机,保证电机迅速响应扭矩请求,使车辆迅速制动。车载控制器同时将减速度请求发送给电子控制模块,电子控制模块开始工作,最终效果如图2中d所示。
46.在步骤s303中,根据传感器反馈的当前减速度与数据分析单元反馈的安全减速度的插值作为闭环控制的输入,实时调节制动扭矩的大小(步骤s305),随着电子控制模块逐渐起作用,车辆实际减速度会逐渐增大至安全减速度(步骤s305、s306)直至自动制动结束(步骤s308)。
47.提供本文中提出的实施例和示例,以便最好地说明按照本技术及其特定应用的实施例,并且由此使本领域的技术人员能够实施和使用本发明。但是,本领域的技术人员将会知道,仅为了便于说明和举例而提供以上描述和示例。所提出的描述不是意在涵盖本发明的各个方面或者将本发明局限于所公开的精确形式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。