低轨卫星tdma动中通系统的前向链路时延估计方法
技术领域
1.本发明涉及tdma卫星通信系统的时间同步技术,尤其涉及一种透明转发低轨卫星tdma动中通系统的前向链路时延估计方法。
背景技术:
2.在tdma通信系统中,前向链路时间同步的目的是实现网络时钟参考(ncr)同步,即建立端站计时系统与主站计时系统之间的映射关系,进而达到端站通过本地计时系统识别主站时隙位置的目的。研究表明,基于算法来实现前向链路时间同步需要对前向链路的传输时延进行估计。
3.广义的前向链路传输时延包含以下四个部分:前向链路的发送侧处理时延、前向链路的接收侧处理时延、星上处理时延和前向链路的自由空间传输时延。对于透明转发卫星而言,星载转发器仅对信号进行滤波、放大、变频等简单处理,其时延远小于前向链路的自由空间传输时延,因此可以忽略;而前向链路的发送侧处理时延和接收侧处理时延均可以根据具体处理机制准确地估计。因此,本技术主要讨论前向链路自由空间传输时延的估计方法。
4.如图1所示,在透明转发卫星tdma通信系统中,前向链路是一条从主站到卫星,再到端站的传输链路,由前向上行链路和前向下行链路两部分组成。其中,前向上行链路是指从主站到卫星的传输链路,前向下行链路是指从卫星到端站的传输链路。通过分别估计出前向上行链路和前向下行链路的自由空间传输时延,然后将二者相加,就可以得到前向链路的自由空间传输时延。
5.在低轨卫星通信系统中,卫星的位置随时间变化,因此前向链路不是一条固定不变的传输链路,而是随时间变化而变化的。准确估计前向链路自由空间传输时延的首要前提是正确找到待估计的前向链路是哪一条。对于动中通场景,主站的位置固定不变,而卫星和端站的位置随时间变化,所以前向链路由卫星和端站的位置唯一确定;而卫星和端站的位置是时间的函数,因此,确定了前向信息到达卫星的时间和到达端站的时间,就能确定相应时刻卫星的位置和端站的位置,进而唯一确定传输前向信息的前向链路。举例,如图1所示,前向信息d[n]在t
n
时刻从主站发出,在t
′
n
时刻到达卫星,随后被卫星转发给端站,并在t
″
n
时刻到达端站。在t
′
n
时刻,卫星的位置是p(t
′
n
);在t
″
n
时刻,端站的位置是r(t
″
n
)。因此,传输d[n]的前向链路就是h
→
p(t
′
n
)
→
r(t
″
n
)。综上所述,确定前向信息到达卫星和端站的时间是准确估计前向链路自由空间传输时延的关键。
技术实现要素:
[0006]
为了解决上述相关现有技术问题,本发明提供一种透明转发低轨卫星tdma动中通系统的前向链路时延估计方法,采用了基于线性近似的外推估计法,计算简便;在卫星星历信息准确的条件下,可以获得良好的估计性能。
[0007]
为了实现本发明的目的,本发明拟通过以下技术方案实现:
[0008]
一种透明转发低轨卫星tdma动中通系统的前向链路时延估计方法,包括如下步骤:
[0009]
s1、建立直角坐标系以星历时间t为横坐标,并以发送前向信息d[n]的星历时间t
n
为横坐标原点;以卫星/主站间的传输时延τ
′
sat/hub
(t)为纵坐标,并以0为纵坐标原点;
[0010]
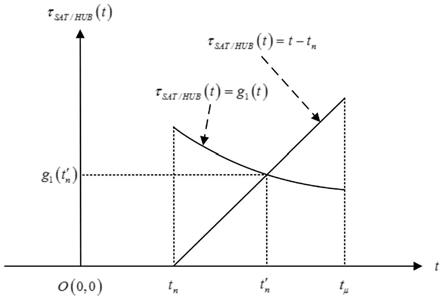
s2、在直角坐标系中,建立两个线性方程:一个是恒等直线方程l1:τ
′
sat/hub
(t)=t,另一个是卫星/主站传输时延与星历时间的函数τ
sat/hub
(t)=g1(t)的坐标平移版本τ
′
sat/hub
(t)=τ
sat/hub
(t t
n
)=g1(t t
n
)在区间[0,t]上的局部近似直线段方程l2:t是一个时间增量,且t是一个时间增量,且表示前向上行链路自由空间传输时延的最大值;
[0011]
其中,直线段方程l2的建立方法如下:
[0012]
在曲线τ
′
sat/hub
(t)=g1(t t
n
),t∈[0,t]上选取两个相邻的点(0,g1(t
n
))和(t,g1(t
μ
)),其中,t
μ
=t
n
t;
[0013]
根据(0,g1(t
n
))和(t,g1(t
μ
))两点的坐标建立直线段方程,得
[0014][0015]
s3、求解直线l1和直线段l2的交点坐标t
intersect
;
[0016]
直线l1和直线段l2的交点坐标t
intersect
通过如下公式求解:
[0017][0018]
s4、估算前向信息d[n]到达卫星的星历时间,得
[0019]
t
′
n
=t
n
t
intersect
;
[0020]
s5、估算前向信息d[n]到达端站的星历时间t
″
n
:当端站正确解析出前向信息d[n]时,记录此时的本地ncr时间;根据端站侧ncr时间与星历时间的映射关系,将此ncr时间映射成星历时间将作为t
″
n
的近似估计值,即
[0021]
s6、根据预先计算的参数:卫星/主站传输时延与星历时间的函数τ
sat/hub
(t),以及前向信息d[n]到达卫星的星历时间t
′
n
,估算前向上行链路的自由空间传输时延τ
fl/ul
(t
′
n
):
[0022]
τ
fl/ul
(t
′
n
)=τ
sat/hub
(t
′
n
);
[0023]
s7、估算前向下行链路的自由空间传输时延,包括步骤:
[0024]
根据卫星的星历信息和前向信息d[n]到达卫星的星历时间t
′
n
,估算出此时卫星在地心地固(ecef)坐标系下的位置p(t
′
n
);
[0025]
根据前向信息d[n]到达端站的星历时间t
″
n
,确定此时端站的gnss位置,并进一步换算出端站在ecef坐标系下的位置r(t
″
n
);
[0026]
估算出卫星和端站在ecef坐标系下的距离d
sat/rcst
(t
′
n
,t
″
n
)=||p(t
′
n
)
‑
r(t
″
n
)||,其中,||
·
||表示两点间的欧氏距离;
[0027]
用卫星和端站的距离d
sat/rcst
(t
′
n
,t
″
n
)除以电磁波的传播速度c,得到前向下行链路的自由空间传输时延,即
[0028][0029]
s8、将前向上行链路和前向下行链路的自由空间传输时延相加,得到前向链路的自由空间传输时延τ
fl/fs
(t
′
n
,t
″
n
):
[0030]
τ
fl/fs
(t
′
n
,t
″
n
)=τ
fl/ul
(t
′
n
) τ
fl/dl
(t
′
n
,t
″
n
)。
[0031]
本发明有益效果在于:采用了基于线性近似的外推估计法,计算简便;在卫星星历信息准确的条件下,可以获得良好的估计性能。
附图说明
[0032]
图1是透明转发低轨卫星tdma通信系统的前向链路示意图。
[0033]
图2是本发明中估算前向信息d[n]到达卫星的星历时间t
′
n
的方法的原理示意图。
[0034]
图3是本发明所述方法中步骤s1~s3的几何示意图。
具体实施方式
[0035]
为了使本技术的目的、技术方案和具体实施方法更为清楚,结合附图实例对本技术进行进一步详细说明。
[0036]
如图1是透明转发低轨卫星tdma通信系统的前向链路示意图。前向链路是一条从主站到卫星,再到端站的传输链路,由前向上行链路和前向下行链路两部分组成。其中,前向上行链路是指从主站到卫星的传输链路,前向下行链路是指从卫星到端站的传输链路。由于低轨卫星的位置是随时间变化的,所以前向链路不是一条固定不变的传输链路,它是随时间变化而变化的。对于动中通场景,主站的位置固定不变,而卫星和端站的位置随时间变化,所以前向链路由卫星和端站的位置唯一确定。在本图中,前向信息d[n]在t
n
时刻从主站发出,在t
′
n
时刻到达卫星,随后被卫星转发给端站,并在t
″
n
时刻到达端站。在t
′
n
时刻,卫星的位置是p(t
′
n
);在t
″
n
时刻,端站的位置是r(t
″
n
)。因此,传输d[n]的前向链路就是h
→
p(t
′
n
)
→
r(t n
)。
[0037]
本技术实施例提供一种透明转发低轨卫星tdma动中通系统的前向链路时延估计方法,该方法的设计思想如下:
[0038]
首先,根据卫星的星历信息以及主站的gnss位置信息,预先计算出卫星可视窗口内,卫星/主站传输时延与星历时间的函数τ
sat/hub
(t)=g1(t)。
[0039]
然后,分别估算出前向信息d[n]到达卫星的星历时间t
′
n
和到达端站的星历时间t
″
n
。
[0040]
然后,根据前向信息d[n]到达卫星的星历时间t
′
n
和函数τ
sat/hub
(t)=g1(t)估算出前向上行链路的自由空间传输时延τ
fl/ul
(t
′
n
)=τ
sat/hub
(t
′
n
)。
[0041]
然后,根据前向信息d[n]到达卫星的星历时间t
′
n
和到达端站的星历时间t
″
n
确定传输d[n]的前向下行链路,并估算出前向下行链路的自由空间传输时延τ
fl/dl
(t
′
n
,t
″
n
)。
[0042]
最后,将前向上行链路和前向下行链路的自由空间传输时延相加,得到前向链路的自由空间传输时延。
[0043]
首先,为使用本技术实施例所述方法准备三个前提条件:
[0044]
1、在主站侧,建立ncr时间与星历时间的映射关系。
[0045]
2、主站将前向信息d[n]及其发送时刻(此处的发送时刻特指信息d[n]离开主站发射天线的时刻)对应的星历时间t
n
一并发送给端站。
[0046]
3、端站能够实时获取到自身的gnss位置信息。
[0047]
在上述前提条件下,为了简化前向链路时延估计的计算复杂度,预先准备一组参数,即卫星/主站传输时延与星历时间的函数。具体计算方法如下:
[0048]
1)根据卫星的星历信息计算出卫星可视窗口内,卫星在ecef坐标系下的位置与星历时间的函数。
[0049]
2)根据主站的gnss位置换算得到主站在ecef坐标系下的位置。
[0050]
3)在ecef坐标系下,根据卫星和主站的位置信息,计算出卫星/主站距离与星历时间的函数d
sat/hub
(t)=f1(t)。
[0051]
4)用d
sat/hub
(t)=f1(t)除以电磁波的传播速度c,得到卫星/主站传输时延与星历时间的函数τ
sat/hub
(t)=d
sat/hub
(t)/c。
[0052]
在上述条件下,进行前向链路的自由空间传输时延估计:
[0053]
s1、建立直角坐标系以星历时间t为横坐标,并以发送前向信息d[n]的星历时间t
n
为横坐标原点;以卫星/主站间的传输时延τ
′
sat/hub
(t)为纵坐标,并以0为纵坐标原点。
[0054]
s2、在直角坐标系中,建立两个线性方程。一个是恒等直线方程l1:τ
′
sat/hub
(t)=t,另一个是卫星/主站传输时延与星历时间的函数τ
sat/hub
(t)=g1(t)的坐标平移版本τ
′
sat/hub
(t)=τ
sat/hub
(t t
n
)=g1(t t
n
)在区间[0,t]上的局部近似直线段方程l2:后者的建立方法如下:首先,在曲线τ
′
sat/hub
(t)=g1(t t
n
),t∈[0,t]上选取两个相邻的点(0,g1(t
n
))和(t,g1(t
μ
)),其中,t
μ
=t
n
t,t是一个时间增量,且增量,且表示前向上行链路自由空间传输时延的最大值。然后,根据上述两点的坐标建立直线段方程,得
[0055][0056]
s3、求解直线l1和直线段l2的交点坐标,得
[0057][0058]
如图3所示,为本实施例方法步骤s1~s3的几何示意图,其代表的场景是卫星与主站的距离逐渐减小,因此前向上行链路的传输时延也逐渐减小。
[0059]
s4、估算前向信息d[n]到达卫星的星历时间,得
[0060]
t
′
n
=t
n
t
intersect
。
[0061]
具体的,估算前向信息d[n]到达卫星的星历时间t
′
n
的方法如下:如图1所示,在t
n
时刻,主站发出前向信息d[n],此时,卫星位于p(t
n
)的位置。之后,d[n]在前向上行链路中
传输,而卫星继续沿着箭头指向的方向在轨道上运动。在t
′
n
时刻,卫星运动到新的位置p(t
′
n
),而此时,d[n]也刚好到达卫星,即经过时延t
′
n
‑
t
n
后d[n]与卫星相遇。在上述相遇问题中,卫星在轨道p(t
n
)
→
p(t
′
n
)上的运动时间与d[n]在前向上行链路h
→
p(t
′
n
)上的传输时延恰好相等,即直线τ
sat/hub
(t)=t
‑
t
n
与曲线τ
sat/hub
(t)=g1(t)在t
n
之后必然相交,且交点就是t
′
n
(如图2所示,其代表的场景是卫星与主站的距离逐渐减小,因此前向上行链路的传输时延也逐渐减小。在本图中,g1(t
′
n
)=t
′
n
‑
t
n
)。因此,求解非线性方程组
[0062][0063]
就可以得到前向信息d[n]到达卫星的星历时间t
′
n
。
[0064]
通常,在低轨卫星通信系统中,前向上行链路的自由空间传输时延很小,卫星在这段时间的移动距离很短,其运动轨迹可以近似为直线段。因此,曲线τ
sat/hub
(t)=g1(t)在t
n
附近的区域也可以近似为直线段。令此直线段的方程为其中,t是一个时间增量。从而,上述问题可以简化为直线τ
sat/hub
(t)=t
‑
t
n
和直线段的相交问题。综上所述,求解线性方程组
[0065][0066]
就可以得到前向信息d[n]到达卫星的星历时间t
′
n
。
[0067]
s5、估算前向信息d[n]到达端站的星历时间t
″
n
。
[0068]
前向信息d[n]到达端站的时间特指d[n]到达端站接收天线的时间。然而,由于端站的接收处理时延很小,在这段时间内,端站的位移可以忽略。所以,可以认为前向信息d[n]到达端站接收天线的时间与端站正确解析出d[n]的时间近似相等。因此,可以通过如下方法来估算前向信息d[n]到达端站的星历时间t
″
n
:当端站正确解析出前向信息d[n]时,记录此时的本地ncr时间。然后,根据端站侧ncr时间与星历时间的映射关系,将此ncr时间映射成星历时间最后,将作为t
″
n
的近似估计值,即
[0069]
s6、根据预先计算的参数:卫星/主站传输时延与星历时间的函数τ
sat/hub
(t),以及前向信息d[n]到达卫星的星历时间t
′
n
,估算前向上行链路的自由空间传输时延,得
[0070]
τ
fl/ul
(t
′
n
)=τ
sat/hub
(t
′
n
)。
[0071]
s7、估算前向下行链路的自由空间传输时延。具体方法如下:首先,根据卫星的星历信息和前向信息d[n]到达卫星的星历时间t
′
n
,估算出此时卫星在ecef坐标系下的位置p(t
′
n
)。然后,根据前向信息d[n]到达端站的星历时间t
″
n
,确定此时端站的gnss位置,并进一步换算出端站在ecef坐标系下的位置r(t
″
n
)。然后,估算出卫星和端站在ecef坐标系下的距离d
sat/rcst
(t
′
n
,t
″
n
)=||p(t
′
n
)
‑
r(t
″
n
)||。最后,用卫星和端站的距离d
sat/rcst
(t
′
n
,t
″
n
)除以电磁波的传播速度c,得到前向下行链路的自由空间传输时延,即
[0072][0073]
s8、将前向上行链路和前向下行链路的自由空间传输时延相加,得到前向链路的
自由空间传输时延τ
fl/fs
(t
′
n
,t
″
n
),即
[0074]
τ
fl/fs
(t
′
n
,t
″
n
)=τ
fl/ul
(t
′
n
) τ
fl/dl
(t
′
n
,t
″
n
)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。