1.本发明涉及水声定位导航技术领域,特别涉及一种基于直达声和一次海面反射声传播时延的水下单信标导航方法。
背景技术:
2.水下声信道具有多途的特性,即声源所辐射的声波中不仅有直达声(direct signal,ds)被水听器所接收,也会有声波经海面或海底反射后被水听器所接收,如一次海面反射声波、一次海底反射声波(surface
‑
reflected signal,简记为srs)、海面海底反射声波、海底海面反射声波等,传统的单信标导航算法仅利用直达声的测量信息进行导航,但导航精度较低,较难应用到更加精细的技术领域中。
技术实现要素:
3.本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
4.为此,本发明的目的在于提出一种基于直达声和一次海面反射声传播时延的水下单信标导航方法,该方法提升了单信标导航系统的导航精度。
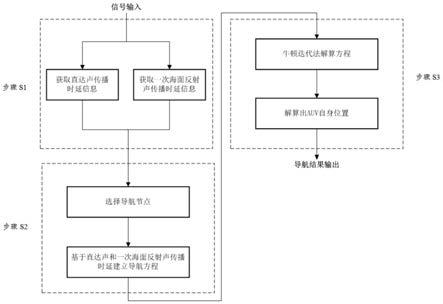
5.为达到上述目的,本发明实施例提出了基于直达声和一次海面反射声传播时延的水下单信标导航方法,包括以下步骤:步骤s1,从发射信号获取直达声和一次海面反射声的传播时延信息;步骤s2,根据所述传播时延信息建立描述目标auv(autonomous underwater vehicle,水下自主航行器)和声信标在两个信号发射周期内的相对几何位置关系的等式,组成导航方程组;步骤s3,采用牛顿迭代法对所述导航方程组进行求解,得到auv位置。
6.本发明实施例的基于直达声和一次海面反射声传播时延的水下单信标导航方法,进行水下单信标导航时,联合利用直达声和一次海面反射声波的传播时延信息建立导航方程以对水下自主航行器auv的位置进行求解,相比于传统的仅利用直达声的单信标导航方法,可以有效地提高导航精度。
7.另外,根据本发明上述实施例的基于直达声和一次海面反射声传播时延的水下单信标导航方法还可以具有以下附加的技术特征:
8.进一步地,在本发明的一个实施例中,当所述发射信号形式为cw脉冲时,采用notch滤波器进行高精度信号传播时延信息估计;当所述发射信号形式为lfm脉冲时,采用匹配滤波器进行高精度信号传播时延信息估计。
9.进一步地,在本发明的一个实施例中,第一个信号发射周期内,使所述声信标发射声信号,所述目标auv在a点接收到直达声,其传播时延为t
a
,由于所述目标auv在运动,当所述目标auv移动到b点时,接收到一次海面反射声,其传播时延为t
b
,第二个信号发射周期内,所述目标auv在c点接收到直达声,且传播时延为t
c
,所述目标auv在d点接收到一次海面反射声,其传播时延为t
d
。
10.进一步地,在本发明的一个实施例中,设声速为c,步骤s2具体为:在所述第一个信
号周期内,将使传播时延t
a
与声速c相乘描述直达声传播路径的长短,同时,使传播时延t
b
与声速c相乘描述一次海面反射声传播路径的长短;在所述第二个信号周期内,将使传播时延t
c
与声速c相乘描述直达声传播路径的长短,同时,使传播时延t
d
与声速c相乘描述一次海面反射声传播路径的长短。
11.进一步地,在本发明的一个实施例中,所述步骤s2中的导航方程组为:
[0012][0013][0014][0015][0016]
其中,x
a
为a点坐标,x
o
为o点坐标,x
c
为c点在x轴方向上的坐标,x
o
为o点在x轴方向上的坐标,x
ac
为在x轴方向上从a点指向c点的位移,y
c
为c点在y轴方向上的坐标,y
o
为o点在y轴方向上的坐标,y
ac
为在y轴方向上从a点指向c点的位移,z
a
为a点在z轴方向上的坐标,z
o
为o点在z轴方向上的坐标,x
o1
为o1点坐标,x
c
为c点坐标,c为声速,t
a
为第一个信号周期内直达声的传播时延,t
b
为第一个信号周期内一次海面反射声的传播时延,t
c
为第二个信号周期内直达声的传播时延,t
d
为第二个信号周期内直达声的传播时延。
[0017]
进一步地,在本发明的一个实施例中,所述步骤s3具体为:步骤s301,将所述导航方程组改写成线性方程组:
[0018][0019]
步骤s302,设x=[x
c
,y
c
]
t
和f=[f1,f2,f3,f4]
t
,所述线性方程组写成f(x)=0;
[0020]
步骤s303,设x的第n次的迭代结果为x
n
,则第n 1次的迭代结果x
n 1
,若迭代结果不符合预设迭代精度要求,则重复进行循坏求解直到符合,得到所述auv位置。
[0021]
进一步地,在本发明的一个实施例中,所述步骤s303的计算公式为:
[0022]
x
n 1
=x
n
‑
f
′
(x
n
)
f(x
n
)n=1,2,l
[0023]
其中,f
′
(x
n
)为f(x)的雅克比矩阵在x
n
处的取值,m
为求矩阵的伪逆。
[0024]
本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0025]
本发明上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
[0026]
图1是本发明一个实施例的基于直达声和一次海面反射声传播时延的水下单信标导航方法的流程图;
[0027]
图2是本发明一个实施例的基于直达声和一次海面反射声传播时延的水下单信标导航方法的具体执行图;
[0028]
图3是本发明一个实施例的水下单信标导航的场景态势图;
[0029]
图4是本发明具体实施例一的轨迹示意图;
[0030]
图5是本发明具体实施例一导航结果的均方根误差示意图;
[0031]
图6是本发明具体实施例二的轨迹示意图;
[0032]
图7是本发明具体实施例二导航结果的均方根误差示意图。
具体实施方式
[0033]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0034]
下面参照附图描述根据本发明实施例提出的基于直达声和一次海面反射声传播时延的水下单信标导航方法。
[0035]
图1是本发明一个实施例的基于直达声和一次海面反射声传播时延的水下单信标导航方法的流程图。
[0036]
图2是本发明一个实施例的基于直达声和一次海面反射声传播时延的水下单信标导航方法的具体执行图。
[0037]
如图1和2所示,该基于直达声和一次海面反射声传播时延的水下单信标导航方法包括以下步骤:
[0038]
在步骤s1中,从发射信号获取直达声和一次海面反射声的传播时延信息。
[0039]
具体地,如图3所示,o点代表声信标,在一个信号发射周期内,目标auv在a点接收到ds且其传播时延为t
a
,由于目标auv在运动,目标auv移动到b点接收到srs且其传播时延为t
b
,以此类推,在另一个信号发射周期,目标auv在c点接收到ds且其传播时延为t
c
,在d点接收到srs且其传播时延为t
d
。建立三维直角坐标系且将原点置于海面,设点*的坐标为x
*
=[x
*
,y
*
,z
*
](*∈{o,a,b,c,d}),点o的坐标可以通过gps系统和压力传感器获得,目标auv的入水深度可通过其自身搭载的压力传感器获得,虚拟基线矢量l
ac
=[x
c
‑
x
a
,y
c
‑
y
a
]=[x
ac
,y
ac
]可通过目标auv搭载的惯性导航系统获得。由于虚拟基线矢量|l
ab
|较小,无法通过惯性导航系统获得,故在后续的处理过程中将a和b认为是同一点,c和d亦是如此。
[0040]
进一步地,当发射信号形式为cw脉冲时,采用notch滤波器进行高精度信号传播时延信息估计;当发射信号形式为lfm脉冲时,采用匹配滤波器进行高精度信号传播时延信息估计。
[0041]
在步骤s2中,根据传播时延信息建立描述目标auv和声信标在两个信号发射周期内的相对几何位置关系的等式,组成导航方程组。
[0042]
进一步地,在本发明的一个实施例中,步骤s2具体包括:
[0043]
在第一个信号周期内,将使传播时延t
a
与声速c相乘描述直达声传播路径的长短,同时,使传播时延t
b
与声速c相乘描述一次海面反射声传播路径的长短;
[0044]
在第二个信号周期内,将使传播时延t
c
与声速c相乘描述直达声传播路径的长短,同时,使传播时延t
d
与声速c相乘描述一次海面反射声传播路径的长短。
[0045]
具体地,本发明实施例需要两个信号周期来完成自身位置的解算。设声速为c,在第一个信号周期内,t
a
c描述直达声传播路径的长短,即o和a两点之间的距离大小,该几何关系可用下式表述:
[0046][0047]
式中,||x||2代表向量x的2
‑
范数,x
a
为a点坐标,x
o
为o点坐标,x
c
为c点在x轴方向上的坐标,x
o
为o点在x轴方向上的坐标,x
ac
为在x轴方向上从a点指向c点的位移,y
c
为c点在y轴方向上的坐标,y
o
为o点在y轴方向上的坐标,y
ac
为在y轴方向上从a点指向c点的位移,z
a
为a点在z轴方向上的坐标,z
o
为o点在z轴方向上的坐标。
[0048]
t
b
c描述了、一次海面反射声传播路径的长短,根据虚源理论可知t
b
c等于虚源o1与b之间的距离大小,考虑到a和b近似共点,该几何关系可用下式表述:
[0049][0050]
其中,x
o1
为o1点坐标,x
c
为c点坐标。
[0051]
以此类推,在第二个信号周期内可建立如下的数学关系式:
[0052][0053][0054]
联立式(1)
‑
(4),便得到导航方程组。
[0055]
其中,c为声速,t
a
为第一个信号周期内直达声的传播时延,t
b
为第一个信号周期内一次海面反射声的传播时延,t
c
为第二个信号周期内直达声的传播时延,t
d
为第二个信号周期内直达声的传播时延。
[0056]
在步骤s3中,采用牛顿迭代法对导航方程组进行求解,得到auv位置。
[0057]
进一步地,在本发明的一个实施例中,步骤s3具体为:
[0058]
步骤s301,将导航方程组改写成线性方程组:
[0059][0060]
步骤s302,设x=[x
c
,y
c
]
t
和f=[f1,f2,f3,f4]
t
,线性方程组写成f(x)=0;
[0061]
步骤s303,设x的第n次的迭代结果为x
n
,则第n 1次的迭代结果x
n 1
,若迭代结果不符合预设迭代精度要求,则重复进行循坏求解直到符合,得到auv位置。
[0062]
具体地,公式(1)
‑
(4)为非线性方程,本发明实施例采用牛顿迭代法对其进行求解,为方便后续处理将其改写为:
[0063][0064]
设x=[x
c
,y
c
]
t
和f=[f1,f2,f3,f4]
t
,公式(5)可以写成:
[0065]
f(x)=0 (7)
[0066]
牛顿迭代法是一个不断用变量的旧值递推新值的过程,其变量的估计精度随着迭代次数的增加而提高,设x的第n次的迭代结果为x
n
,则其第n 1次的迭代结果x
n 1
可通过下式求解:
[0067]
x
n 1
=x
n
‑
f
′
(x
n
)
f(x
n
)n=1,2,l
ꢀꢀ
(8)
[0068]
式中,f
′
(x
n
)为f(x)的雅克比矩阵在x
n
处的取值,m
为求矩阵的伪逆。若求出的结果不符合迭代精度要求,再重复进行循坏求解,直到符合求解的精度要求。
[0069]
下面通过两个具体实施例对本发明实施例提出的基于直达声和一次海面反射声传播时延的水下单信标导航方法进一步说明。
[0070]
具体实施例一
[0071]
仿真参数如下:声信标坐标为[0,0,
‑
30]m,目标auv的起始坐标为[
‑
500,400,
‑
300]且其沿x轴正方向以5m/s的速度航行,声信标的信号发射周期为1s且其连续发射200个信号,声速为1500m/s,声信标位置测量误差、直达声时延测量误差、一次海面反射声时延测量误差、声速测量误差、深度测量误差和惯性导航误差皆服从均值为零的高斯分布并且相互独立,测量误差的标准差分别为1.8m、1ms、1.2ms、2m/s、1.5m和2
‰
,在解算时选取的两个导航节点间隔20个信号周期,蒙特卡洛仿真次数3000次。
[0072]
采用本发明实施例所涉及的导航方法对目标auv自身的位置进行解算,为了比较同时给出了仅利用直达声传播时延的导航方法的计算结果。图3给出了直线轨迹的示意图,图4统计了3000次蒙特卡洛试验仿真结果的均方根误差(图中用ds
‑
srs指代本发明实施例)。由图可见,相比于仅利用直达声的导航方法,本发明实施例所涉及的导航方法能有效地提高导航精度。
[0073]
具体实施例二
[0074]
仿真参数如下:声信标坐标为[0,0,
‑
30]m,目标auv的起始坐标为[
‑
500,0,
‑
300]且其在为以声信标为圆心且半径为500m的圆形轨迹内逆时针航行,航速大小5m/s,声信标的信号发射周期为1s且其连续发射200个信号,声速为1500m/s,声信标位置测量误差、直达声时延测量误差、一次海面反射声时延测量误差、声速测量误差、深度测量误差和惯性导航误差皆服从均值为零的高斯分布并且相互独立,测量误差的标准差分别为1.8m、1ms、1.2ms、2m/s、1.5m和2
‰
,在解算时选取的两个导航节点间隔20个信号周期,蒙特卡洛仿真次数3000次。
[0075]
采用本发明实施例所涉及的导航方法对目标auv自身的位置进行解算,为了比较同时给出了仅利用直达声传播时延的导航方法的计算结果。图5给出了圆形轨迹的示意图,图6统计了3000次蒙特卡洛试验仿真结果的均方根误差(图中用ds
‑
srs指代本发明实施
例)。由图可见,相比于仅利用直达声的导航方法,本发明实施例所涉及的导航方法能有效地提高导航精度。
[0076]
根据本发明实施例提出的基于直达声和一次海面反射声传播时延的水下单信标导航方法,进行水下单信标导航时,联合利用直达声和一次海面反射声波的传播时延信息建立导航方程以对目标auv的位置进行求解,相比于传统的仅利用直达声的单信标导航方法,可以有效地提高导航精度,另外,具有广泛的应用前景,在民用领域,可应用在资源勘测、海底绘图和水下设备检修等;而在军事领域,则可应用于反潜和水下排雷等。
[0077]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0078]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0079]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。