1.本实用新型涉及物料传送技术领域,尤其是指一种机械手传送系统。
背景技术:
2.有机二极管(oled)作为液晶显示后的新一代发光显示技术,具有可视角宽、对比度高、色彩鲜艳、可柔性显示等优点,已经被普遍应用于各种手机、可穿戴设备中,具有良好的应用前景。
3.在进行蒸镀操作时,需要在蒸镀腔室内放置待蒸镀的硅片,然后在蒸镀腔中进行蒸镀操作。目前,常用机械手夹持托盘,并在托盘内放置硅片以进行传送,使得硅片和托盘到达蒸镀腔内。机械手受到重力的影响具有一定的下垂量,影响托盘中硅片的正常传送。
4.因而,需要设计一种机械手传送系统。
技术实现要素:
5.本实用新型要解决的技术问题是提供一种机械手传送系统,其在送料轨道上设置电磁补偿装置,在机械手的自由端设置有磁力件,通过调整磁力补偿掉送料机械手的下垂量,结构简单,方便作业,适用范围广。
6.为解决上述技术问题,本实用新型提供了一种机械手传送系统,包括第一腔室和第二腔室;所述第一腔室内设置有机械手和送料轨道,所述机械手的自由端沿所述送料轨道移动以将物品送入所述第二腔室;所述机械手的自由端设置有磁力件;所述送料轨道上设置有电磁补偿装置;所述电磁补偿装置与所述磁力件相配合以补偿所述机械手的下垂量。
7.作为优选的,所述送料轨道包括环形轨道和多个直线轨道;所述环形轨道连接各个直线轨道,各所述直线轨道分别连接至各第二腔室。
8.作为优选的,所述第二腔室内设置有与所述直线轨道相配合的转接轨道。
9.作为优选的,所述送料轨道设置在所述第一腔室的底部或顶部;所述转接轨道设置在所述第二腔室的底部或顶部。
10.作为优选的,所述的机械手传送系统,还包括控制模块,所述控制模块与所述电磁补偿装置相连接;所述控制模块根据移动距离及重量控制磁力或者根据下垂量实时控制磁力。
11.作为优选的,所述磁力件为永磁铁或电磁铁。
12.作为优选的,所述磁力件为用于放置蒸镀材料的磁性托盘。
13.作为优选的,所述第一腔室上设置有出料口,所述第二腔室上设置有入料口;所述出料口与所述入料口连接,所述出料口与所述入料口之间设置有闸板。
14.作为优选的,所述第一腔室内增设有校正平台,所述校正平台上设置有用于感应所述机械手下垂量的感应器。
15.作为优选的,所述机械手为三轴摆臂机械手。
16.本实用新型的上述技术方案相比现有技术具有以下优点:
17.1、本实用新型设置第一腔室和第二腔室,通过在第一腔室内设置送料机械手以及送料轨道,能够快速的将蒸镀硅片或蒸镀材料传送至第二腔室,输送效率高,方便作业。
18.2、本实用新型通过设置电磁补偿装置,电磁补偿装置设置在送料轨道上,且机械手的自由端设置有磁力件。通过调节电磁补偿装置中的电流,能够使电磁补偿装置产生磁性与机械手上的磁力件相配合,从而补偿掉机械手的下垂量。本实用新型的结构简单,易于实现且适用范围较广。
附图说明
19.为了使本实用新型的内容更容易被清楚的理解,下面根据本实用新型的具体实施例并结合附图,对本实用新型作进一步详细的说明,其中:
20.图1为本实用新型的结构示意图。
21.说明书附图标记说明:10
‑
第一腔室,11
‑
校正平台,12
‑
转接轨道,13
‑
第二腔室,14
‑
磁力件,15
‑
闸板,16
‑
环形轨道,17
‑
机械手,18
‑
直线轨道。
具体实施方式
22.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好地理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定。
23.实施例
24.参照图1所示,本实用新型公开了一种机械手传送系统,包括:
25.第二腔室13和第一腔室10。
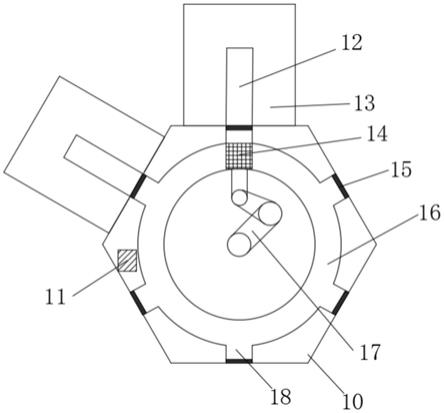
26.具体的,上述第二腔室13用于蒸镀硅片,上述第一腔室10与第二腔室13配合。在上述第一腔室10内设置有机械手17和送料轨道,上述机械手17优选为三轴摆臂机械手,上述三轴摆臂机械手的自由端能够沿着送料轨道移动,从而将待蒸镀的材料送至第二腔室13中进行蒸镀。
27.优选的,上述第一腔室10的形状包括但不限于六角腔或者八角腔。
28.上述第一腔室10上间隔开设有多个出料口。上述第二腔室13上开设有入料口,上述第二腔室13设置有多个,上述第二腔室13排列设置在第一腔室10的周圈。上述第二腔室13上的入料口与第一腔室10上的出料口一一对应,且上述出料口与入料口相连接,上述出料口与入料口之间设置有闸板15。上述机械手17能够快速将待蒸镀的材料送至第二腔室13内,通过设置的多个出料口以及多个第二腔室13,能够使得机械手17的送料效率更高,便于作业。
29.进一步的,上述机械手17的自由端设置有磁力件14,在上述送料轨道上设置有电磁补偿装置。通过调节电磁补偿装置中的电流,能够使电磁补偿装置产生磁性与机械手17上的磁力件相配合,从而补偿掉机械手17的自身下垂量以及待蒸镀的材料加机械手17的下垂量。
30.其中,上述送料轨道包括环形轨道16以及多个直线轨道18,上述环形轨道与各个直线轨道18连接,各个直线轨道18分别连接至各个第二腔室13。各个上述第二腔室13内均设置有转接轨道12,上述转接轨道12与直线轨道18相配合。上述转接轨道12上也设置有电
磁补偿装置。
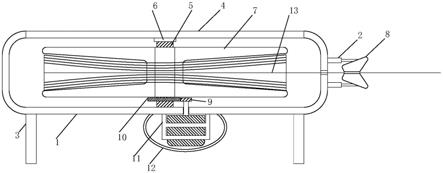
31.优选的,上述送料轨道设置在上述第一腔室10的底部或者顶部,上述转接轨道12设置在上述第二腔室的底部或顶部。上述送料轨道与转接轨道相配合。由于机械手17本身的重力以及待蒸镀材料的重力,机械手17在送料过程中会产生一定的下垂量。调整电磁轨道中的电流,使得电磁补偿装置产生磁性,若将送料轨道设置在上述第一腔室10的顶部,送料轨道上的电磁补偿装置对机械手17有引力,最终抵消因机械手17重力和蒸镀材料重力带来的机械手17下垂。若将送料轨道设置在上述第一腔室10的底部,送料轨道上的电磁补偿装置对机械手17有斥力,也能够抵消因机械手17重力和蒸镀材料重力带来的机械手17下垂。
32.优选的,上述机械手17的自由端设置的磁力件14为永磁铁或电磁铁或用于放置蒸镀材料的磁性托盘。当机械手17将待蒸镀的材料送至第二腔室后,调节电磁补偿装置中的电流,使得电磁补偿装置产生的磁性与机械手17上的磁力件相配合,从而补偿机械手17由于本身的重力而产生的下垂量。
33.其中,校正过程包括以下步骤:
34.第一步,机械手17校正,当电磁补偿装置不通电时,机械手17由于本身的重力原因也会发生一定量的下垂。此时,调整电磁补偿装置中的电流,使得电磁补偿装置产生磁性,补偿掉机械手17因重力产生的下垂。电磁补偿装置一直处于通电状态。
35.第二步,机械手17上放置蒸镀材料后的下垂量校正,当机械手上放置放置待蒸镀的硅片材料后,由于待蒸镀材料的重力以及机械手本身的重力,机械手会进一步发生下垂。此时,继续调节电磁补偿装置中的电流大小,使得电磁补偿装置产生较大的磁性,补偿掉机械手17加蒸镀材料因重力产生的下垂。
36.第二步校正完毕后,电磁补偿装置持续通电,保证机械手17带着蒸镀材料在送料轨道内运行,并且机械手17能够将待蒸镀的材料送至任何一个第二腔室13内。当机械手17将蒸镀材料送至第二腔室13后,将电磁补偿装置中的电流切换至校正的第一步,保证机械手17上的被取出后,机械手17本身由于重力原因产生的下垂量也能够处于正确的补偿状态。
37.进一步地,校正平台11上设置有感应器,用于实时检测机械手17的下垂量。机械手17的下垂量会随着伸展距离的变化而发生变化,校正平台根据机械手17的下垂量或机械手17的承载重量及伸展距离同步调节电磁补偿装置中电流的大小,保证机械手17的下垂量保持不变。
38.工作原理:首先,调整电磁补偿装置中的电流,使得电磁补偿装置产生磁性,补偿掉机械手17自身因重力产生的下垂。其次,当在机械手的自由端放置待蒸镀的硅片材料,继续调整电磁补偿装置中的电流,使得电磁补偿装置中的磁性增大,补偿掉机械手17上装设待蒸镀材料后的下垂量。最后,当机械手17将蒸镀材料送至第二腔室13后,将电磁补偿装置中的电流切换至校正的第一步,保证机械手17上的待蒸镀材料被取出后,机械手17本身由于重力原因产生的下垂量依旧能够处于正确的补偿状态。
39.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变
动仍处于本实用新型创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。