一种基于agv的智能工厂管理系统
技术领域
1.本发明涉及智能工厂领域,尤其是一种基于agv的智能工厂管理系统。
背景技术:
2.随着工业4.0、工业互联网、物联网、云计算、大数据、社交网络、智能化设备、机器社区等新一轮产业变革和技术革命的快速兴起,现代工业信息化发展已迈入建设智能工厂的历史新阶段。当前,我国的制造业仍然面临着巨大的转型压力,由于劳动力成本迅速升高、产能过剩、竞争激烈、客户的需求增长等问题,迫使制造企业从低成本竞争策略转向建立差异化竞争优势。
3.agv(automated guided vehicles)又名无人搬运车,其显著特点是无人驾驶,agv上装备有自动导向系统,可以保障系统在不需要人工引航的情况下就能够沿预定的路线自动行驶,将货物或物料自动从起始点运送到目的地,agv依靠磁导航、视觉导航、激光导航、二维码导航等技术,可以沿着设定的导航路径行驶,搬运物料,并且具有自动充电、安全保护等功能。
4.现有的工厂中实现设备与设备互联,一般通过与设备控制系统集成或外接传感器等,实现周期较长,导致工作效率降低;现有的数字化工厂采用仿真软件对设备和产线布局、工厂物流、人机工程等进行仿真,但由于涉及面比较窄且功能也不齐全,不能很好的适应于工厂复杂的场景。
技术实现要素:
5.本发明所要解决的技术问题是提供一种基于agv的智能工厂管理系统,不但提高了工作效率,而且能较好地适应工厂复杂的场景。
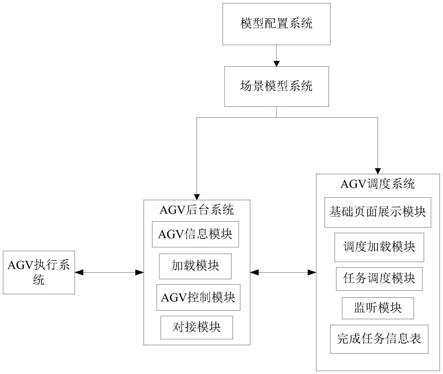
6.本发明解决上述技术问题所采用的技术方案为:一种基于agv的智能工厂管理系统,包括:模型配置系统,用于存放场景功能模型,并将场景功能模型发送给场景模型系统,所述的场景功能模型包括站点模型、自动充电模型、对接模型、交通管制模型、托盘模型、任务链模型、区域模型、障碍物模型和通信模型;场景模型系统,用于根据agv类型选择所述的模型配置系统发送的场景功能模型并配置场景模式,得到配置后的场景模式,将配置后的场景模式对应的模型文件发送至agv后台系统和agv调度系统;agv后台系统,包括:加载模块,用于加载场景模型系统发送的模型文件,解析得到功能组件;对接模块,用于接收agv调度系统发送的任务,并监控agv执行系统执行任务,当任务结束时发送任务结束指令给agv调度系统;agv信息模块,用于根据agv调度系统发送的任务向agv执行系统发送查询指令,并接收所述的agv执行系统发送的agv的信息,所述的agv的信息包括agv的坐标位置信息、坐标角度信息、申请资源信息、电量信息、运行状态信息和异常信息;agv控制模块,用于根据所述的agv的信息选择对应的功能组件,并发送选择
的功能组件对应的控制指令给所述的agv执行模块;agv调度系统,包括:基础页面展示模块,为工作人员手动发送任务、实时观察任务和处理异常任务提供服务;调度加载模块,用于加载所述的场景模型系统传输的与所述的agv后台系统加载的相同的模型文件,解析得到参数信息并发送给任务调度模块,所述的参数信息包括工位坐标站点信息、原点坐标信息、充电坐标信息和任务站点信息;任务调度模块,用于接收工作人员手动发送的任务和其他系统发送的任务,并根据预设定的调度原则和所述的调度加载模块传输的参数信息将接收的任务依次发送至所述的agv后台系统;监听模块,用于对所述的agv后台系统进行监听,当监听到所述的agv后台系统发送的任务结束指令时,将该任务移入所述的完成任务信息表中,所述的完成任务信息表用于存放结束任务的任务;agv执行系统,用于接收所述的agv后台系统发送的查询指令,并根据查询指令发送相应的agv的信息至所述的agv后台系统,还用于接收所述的agv后台系统发送的控制指令并执行控制指令。
7.所述的agv类型包括磁导航agv、激光导航agv和混合导航agv,所述的场景模型系统中配置后的场景模式包括磁导航agv场景模式、激光导航agv场景模式和混合导航agv场景模式。
8.所述的磁导航agv场景模式的具体配置过程包括以下步骤:a1从模型配置系统发送的场景功能模型中选择磁导航agv对应的场景功能模型作为磁导航的场景功能模型并构建磁导航场景地图;a2根据磁导航场景地图对选择的磁导航的场景功能模型进行参数配置,得到地图场景;a3将地图场景解析成模型文件;a4根据模型文件,对磁导航agv在工厂中的运行路线进行模拟测试;a5判断模拟测试是否达到工厂实际运行情况,若是,则执行步骤a8;若不是,则执行步骤a6;a6判断选择的磁导航的场景功能模型的参数配置是否出现问题,若是,则返回步骤a2中修改该选择的磁导航的场景功能模型的参数;若不是,则执行步骤a7;a7判断选择的磁导航的场景功能模型是否出现问题,若是,则返回步骤a1中删除该选择的磁导航的场景功能模型,并重新选择磁导航的场景功能模型;若不是,则执行步骤a8;a8完成磁导航agv场景模式的配置。
9.所述的激光导航agv场景模式的具体配置过程包括以下步骤:b1以工厂地图为模型创建虚拟地图,并以虚拟地图作为激光导航场景地图的参考坐标系;b2从模型配置系统发送的场景功能模型中选择激光导航agv对应的场景功能模型作为激光导航的场景功能模型并构建激光导航场景地图;b3根据激光导航场景地图对选择的激光导航的场景功能模型进行参数配置,得到地图场景;b4将地图场景解析成模型文件;
b5根据模型文件,对激光导航agv在工厂中的运行路线进行模拟测试;b6判断模拟测试是否达到工厂实际运行情况,若是,则执行步骤b9;若不是,则执行步骤b7;b7判断选择的激光导航的场景功能模型的参数配置是否出现问题,若是,则返回步骤b3中修改该选择的激光导航的场景功能模型的参数;若不是,则执行步骤b8;b8判断选择的激光导航的场景功能模型是否出现问题,若是,则返回步骤b2中删除该选择的激光导航的场景功能模型,并重新选择激光导航的场景功能模型;若不是,则执行步骤b9;b9完成激光导航agv场景模式的配置。
10.所述的混合导航agv场景模式的具体配置过程包括以下步骤:c1以工厂地图为模型创建虚拟地图,并以虚拟地图作为激光导航场景地图的参考坐标系;c2从模型配置系统发送的场景功能模型中选择激光导航agv对应的场景功能模型作为激光导航的场景功能模型并构建激光导航场景地图;c3根据激光导航场景地图对选择的激光导航的场景功能模型进行参数配置,得到激光导航地图场景;c4从模型配置系统发送的场景功能模型中选择磁导航agv对应的场景功能模型作为磁导航的场景功能模型并追加到激光导航地图场景中;c5在激光导航场景地图的基础上根据选择的磁导航的场景功能模型构建磁导航场景地图得到混合场景地图;c6根据混合场景地图对选择的磁导航的场景功能模型进行参数配置,得到地图场景;c7将地图场景解析成模型文件;c8根据模型文件,对混合导航agv在工厂中的运行路线进行模拟测试;c9判断模拟测试是否达到工厂实际运行情况,若是,则执行步骤c14;若不是,则执行步骤c10;c10判断选择的激光导航的场景功能模型的参数配置是否出现问题,若是,则返回步骤c3中修改该选择的激光导航的场景功能模型的参数;若不是,则执行步骤c11;c11判断选择的激光导航的场景功能模型是否出现问题,若是,则返回步骤c2中删除该选择的激光导航的场景功能模型,并重新选择激光导航的场景功能模型;若不是,则执行步骤c12;c12判断选择的磁导航的场景功能模型的参数配置是否出现问题,若是,则返回步骤c6中修改该选择的磁导航的场景功能模型的参数;若不是,则执行步骤c13;c13判断选择的磁导航的场景功能模型是否出现问题,若是,则返回步骤c4中删除该选择的磁导航的场景功能模型,并重新选择磁导航的场景功能模型;若不是,则执行步骤c14;c14完成混合导航agv场景模式的配置。
11.所述的加载模块解析得到的功能组件包括交通管制组件、agv之间的实时通信组件、路径优化组件、任务链执行组件、资源申请组件和自动充电组件。
12.所述的其他系统包括erp、mes、wms和app,所述的预设定的调度原则包括时间的先后顺序原则、agv的坐标距离远近原则和任务的优先级原则。
13.与现有技术相比,本发明的优点在于本发明的智能工厂模型系统,包括agv后台系统、agv调度系统、模型配置系统、场景模型系统、agv执行系统,根据模型配置系统提供的多种场景功能模型的复用性,可为业务变动频繁的创新企业和业务系统复杂的工厂环境提供支持,不但提高了工作效率,而且能较好地适应工厂复杂的场景,在场景模型系统中可利用模拟测试来模拟各个类型agv在工厂中的运行路线,减少了线下资源的浪费,提升了系统的真实性。
附图说明
14.图1为本发明的系统框架结构示意图;图2为本发明的实施例中配置磁导航agv场景模式的流程示意图;图3为本发明的实施例中配置激光导航agv场景模式的流程示意图;图4为本发明的实施例中配置混合导航agv场景模式的流程示意图;图5为本发明改造前后执行完成任务所需的时间的结果对比示意图。
具体实施方式
15.以下结合附图实施例对本发明作进一步详细描述。
16.如图1所示,一种基于agv的智能工厂管理系统,包括:模型配置系统,用于存放场景功能模型,并将场景功能模型发送给场景模型系统,场景功能模型包括站点模型、自动充电模型、对接模型、交通管制模型、托盘模型、任务链模型、区域模型、障碍物模型和通信模型;场景模型系统,用于根据agv类型选择模型配置系统发送的场景功能模型并配置场景模式,得到配置后的场景模式,将配置后的场景模式对应的模型文件发送至agv后台系统和agv调度系统;agv后台系统,包括:加载模块,用于加载场景模型系统发送的模型文件,解析得到功能组件;对接模块,用于接收agv调度系统发送的任务,并监控agv执行系统执行任务,当任务结束时发送任务结束指令给agv调度系统,完成任务的信息交换;agv信息模块,用于根据agv调度系统发送的任务向agv执行系统发送查询指令,并接收agv执行系统发送的agv的信息,agv的信息包括agv的坐标位置信息、坐标角度信息、申请资源信息、电量信息、运行状态信息和异常信息;agv控制模块,用于根据agv的信息选择对应的功能组件,并发送选择的功能组件对应的控制指令给agv执行模块;加载模块解析得到的功能组件包括交通管制组件、agv之间的实时通信组件、路径优化组件、任务链执行组件、资源申请组件和自动充电组件;agv调度系统,包括:基础页面展示模块,为工作人员手动发送任务、实时观察任务和处理异常任务提供服务;调度加载模块,用于加载场景模型系统传输的与agv后台系统加载的相同的模型文件,解析得到参数信息并发送给任务调度模块,参数信息包括工位坐标站点信息、原点坐标信息、充电坐标信息和任务站点信息;任务调度模块,用于接收工作人员手动发送的任务和其他系统发送的任务,并根据预设定的调度算法和调度加载模块传输
的参数信息将接收的任务依次发送至agv后台系统,其他系统包括erp、mes、wms和app,预设定的调度原则包括时间的先后顺序、agv的坐标距离和任务的优先级;监听模块,用于对agv后台系统进行监听,当监听到agv后台系统发送的任务结束指令时,将该任务移入完成任务信息表中,完成任务的信息交换,完成任务信息表用于存放结束任务的任务;其他系统包括erp、mes、wms和app,预设定的调度原则包括时间的先后顺序原则、agv的坐标距离远近原则和任务的优先级原则;agv执行系统,用于接收agv后台系统发送的查询指令,并根据查询指令发送相应的agv的信息至agv后台系统,还用于接收agv后台系统发送的控制指令并执行控制指令。
17.agv类型包括磁导航agv、激光导航agv和混合导航agv,场景模型系统中配置后的场景模式包括磁导航agv场景模式、激光导航agv场景模式和混合导航agv场景模式。
18.如图2所示,磁导航agv场景模式的具体配置过程包括以下步骤:a1从模型配置系统发送的场景功能模型中选择磁导航agv对应的场景功能模型作为磁导航的场景功能模型并构建磁导航场景地图;a2根据磁导航场景地图对选择的磁导航的场景功能模型进行参数配置,得到地图场景;a3将地图场景解析成模型文件;a4根据模型文件,对磁导航agv在工厂中的运行路线进行模拟测试;a5判断模拟测试是否达到工厂实际运行情况,若是,则执行步骤a8;若不是,则执行步骤a6;a6判断选择的磁导航的场景功能模型的参数配置是否出现问题,若是,则返回步骤a2中修改该选择的磁导航的场景功能模型的参数;若不是,则执行步骤a7;a7判断选择的磁导航的场景功能模型是否出现问题,若是,则返回步骤a1中删除该选择的磁导航的场景功能模型,并重新选择磁导航的场景功能模型;若不是,则执行步骤a8;a8完成磁导航agv场景模式的配置。
19.如图3所示,激光导航agv场景模式的具体配置过程包括以下步骤:b1以工厂地图为模型创建虚拟地图,并以虚拟地图作为激光导航场景地图的参考坐标系;b2从模型配置系统发送的场景功能模型中选择激光导航agv对应的场景功能模型作为激光导航的场景功能模型并构建激光导航场景地图;b3根据激光导航场景地图对选择的激光导航的场景功能模型进行参数配置,得到地图场景;b4将地图场景解析成模型文件;b5根据模型文件,对激光导航agv在工厂中的运行路线进行模拟测试;b6判断模拟测试是否达到工厂实际运行情况,若是,则执行步骤b9;若不是,则执行步骤b7;b7判断选择的激光导航的场景功能模型的参数配置是否出现问题,若是,则返回步骤b3中修改该选择的激光导航的场景功能模型的参数;若不是,则执行步骤b8;b8判断选择的激光导航的场景功能模型是否出现问题,若是,则返回步骤b2中删
除该选择的激光导航的场景功能模型,并重新选择激光导航的场景功能模型;若不是,则执行步骤b9;b9完成激光导航agv场景模式的配置。
20.如图4所示,混合导航agv场景模式的具体配置过程包括以下步骤:c1以工厂地图为模型创建虚拟地图,并以虚拟地图作为激光导航场景地图的参考坐标系;c2从模型配置系统发送的场景功能模型中选择激光导航agv对应的场景功能模型作为激光导航的场景功能模型并构建激光导航场景地图;c3根据激光导航场景地图对选择的激光导航的场景功能模型进行参数配置,得到激光导航地图场景;c4从模型配置系统发送的场景功能模型中选择磁导航agv对应的场景功能模型作为磁导航的场景功能模型并追加到激光导航地图场景中;c5在激光导航场景地图的基础上根据选择的磁导航的场景功能模型构建磁导航场景地图得到混合场景地图;c6根据混合场景地图对选择的磁导航的场景功能模型进行参数配置,得到地图场景;c7将地图场景解析成模型文件;c8根据模型文件,对混合导航agv在工厂中的运行路线进行模拟测试;c9判断模拟测试是否达到工厂实际运行情况,若是,则执行步骤c14;若不是,则执行步骤c10;c10判断选择的激光导航的场景功能模型的参数配置是否出现问题,若是,则返回步骤c3中修改该选择的激光导航的场景功能模型的参数;若不是,则执行步骤c11;c11判断选择的激光导航的场景功能模型是否出现问题,若是,则返回步骤c2中删除该选择的激光导航的场景功能模型,并重新选择激光导航的场景功能模型;若不是,则执行步骤c12;c12判断选择的磁导航的场景功能模型的参数配置是否出现问题,若是,则返回步骤c6中修改该选择的磁导航的场景功能模型的参数;若不是,则执行步骤c13;c13判断选择的磁导航的场景功能模型是否出现问题,若是,则返回步骤c4中删除该选择的磁导航的场景功能模型,并重新选择磁导航的场景功能模型;若不是,则执行步骤c14;c14完成混合导航agv场景模式的配置。
21.如图5所示,图中横坐标表示执行任务的次数,纵坐标表示执行完成任务所需的时间,从图中可以看出改造后使用本发明执行完成任务所需的时间基本上比改造前没有使用本发明执行完成任务所需的时间少,明显提高了工作效率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。