1.本发明涉及航空技术领域,尤其涉及一种无人直升机及其控制系统。
背景技术:
2.当前的市面上的无人直升机多采用常规构型,使用主旋翼提供全部飞行时所需的升降力,导致无人直升机升降或者悬停时,无人直升机难以保持平衡。
3.综上所述,如何解决无人直升机升降或者悬停时,无人直升机难以保持平衡的问题已经成为本领域技术人员亟待解决的技术问题。
技术实现要素:
4.本发明的目的是提供一种无人直升机及其控制系统,以解决无人直升机升降或者悬停时,无人直升机难以保持平衡的问题。
5.为了实现上述目的,本发明提供了一种无人直升机的控制系统,包括控制器、主旋翼、用于操控所述主旋翼变距的第一操控机构、安装于无人直升机的两侧的机翼,两侧的所述机翼上均安装有推进机构;当无人直升机处于升降或悬停状态时,所述控制器控制所述无人直升机的两侧的所述推进机构进行差动,且使两侧的所述推进机构所产生的水平差动力矩与所述主旋翼旋转而产生的扭矩平衡。
6.优选地,两侧的所述推进机构均用于对所述无人直升机产生斜向上的推进力;当无人直升机处于升降或悬停状态时,所述第一操控机构控制所述主旋翼向后倾斜预设角度,且使所述主旋翼所产生的水平向后的分拉力与两侧的所述推进机构所产生的水平向前的分推力的合力平衡。
7.优选地,当所述无人直升机处于垂直升降状态时,所述主旋翼的拉力和所述推进机构的推力满足如下关系:机构的推力满足如下关系:机构的推力满足如下关系:式中,f1与f2分别为两侧的所述推进机构的推力,t为所述主旋翼的拉力,θ为主旋翼的倾斜角,β为所述推进机构的安装角,q为所述主旋翼旋转而产生的扭矩,l为直升机翼展,m为无人直升机重量,g为重力加速度,a为无人直升机在垂直方向的预期加速度。
8.优选地,还包括用于监测无人直升机各个方向加速度的检测器,所述控制器根据所述检测器检测的数据实时对所述主旋翼和所述推进机构进行闭环控制调整。
9.优选地,所述推进机构为涵道风扇、螺旋桨和小型涡轮发动机中的至少一种。
10.优选地,还包括用于驱动所述主旋翼旋转的动力机构、用于检测所述主旋翼的桨叶所在位置的位置传感器和用于锁止所述主旋翼的锁止机构;
当所述无人直升机向前飞行的速度达到第一预设速度后,随着所述无人直升机向前飞行的速度的增加,所述控制器控制所述动力机构驱动所述主旋翼的旋转速度降低;且当所述无人直升机向前飞行的速度达到第二预设速度且所述位置传感器检测到所述主旋翼的两片桨叶分别指向无人直升机的前方和后方时,所述锁止机构锁止所述主旋翼;当所述无人直升机向前飞行的速度低于第二预设速度时,所述锁止机构解锁所述主旋翼,其中,第一预设速度小于第二预设速度。
11.优选地,所述第一预设速度v1与第二预设速度v2之间满足关系:v1=kv2,其中,k的取值为0.8
‑
0.9。
12.优选地,所述第二预设速度v2的计算方式为:式中,m为无人直升机的重量,g为重力加速度,ρ为大气密度,s为无人直升机的机翼面积,c
lα
为机翼翼型的升力线斜率,β为机翼的安装角。
13.优选地,当所述位置传感器检测到所述主旋翼的两片桨叶转动至提前于无人直升机的正前方预设角度或正后方预设角度时,所述锁止机构执行锁止动作。
14.相比于背景技术介绍内容,上述无人直升机的控制系统,包括控制器、主旋翼、用于操控主旋翼变距的第一操控机构、安装于无人直升机的两侧的机翼,两侧的机翼上均安装有推进机构;当无人直升机处于升降或悬停状态时,控制器控制无人直升机的两侧的推进机构进行差动,且使两侧的推进机构所产生的水平差动力矩与主旋翼旋转而产生的扭矩平衡。该控制系统,在实际应用过程中,当无人直升机处于升降或悬停状态时,通过控制器控制无人直升机的两侧的推进机构进行差动,且使两侧的推进机构所产生的水平差动力矩与主旋翼旋转而产生的扭矩平衡,从而能够使得无人直升机升降或者悬停时保持平衡。
15.另外,本发明还提供了一种无人直升机,包括控制系统,该控制系统为上述任一方案所描述的无人直升机的控制系统,由于该无人直升机的控制系统具有上述技术效果,因此具有该控制系统的无人直升机也应具有相应的技术效果,在此不再赘述。
附图说明
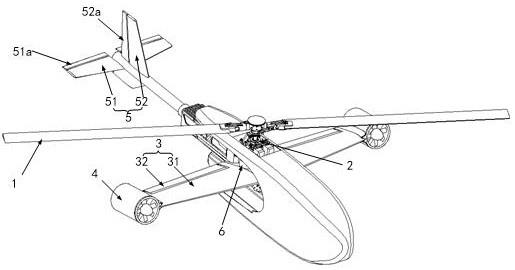
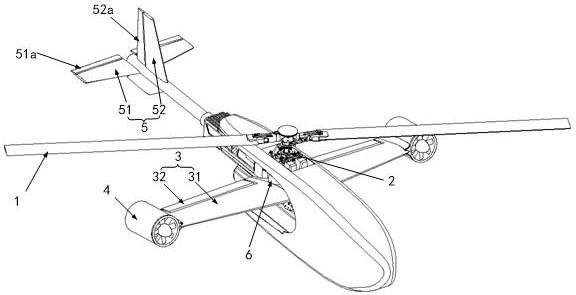
16.图1为本发明实施例提供的无人直升机的整体结构示意图;图2为本发明实施例提供的无人直升机的局部结构示意图;图3为本发明实施例提供的无人直升机的局部剖视结构示意图;图4为本发明实施例提供的前行侧桨叶的桨距角示意图;图5为本发明实施例提供的后行侧桨叶的桨距角示意图;图6为本发明实施例提供的主旋翼的转速与无人直升机向前飞行速度的对应关系示意图;图7为本发明实施例提供的主旋翼的桨距角与无人直升机向前飞行速度的对应关系示意图;图8为本发明实施例提供的机翼的升力控制比例与无人直升机向前飞行速度的对
应关系示意图;图9为本发明实施例提供的机翼的安装角度的示意图;图10为本发明实施例提供的主旋翼的前行侧桨叶与后行侧桨叶的位置结构示意图;图11为本发明实施例提供的主旋翼的桨叶位于正前方和正后方的位置结构示意图。
17.在图1
‑
图11中,主旋翼1、前行侧桨叶1a、后行侧桨叶1b、第一操控机构2、机翼3、主翼31、副翼32、推进机构4、尾翼5、水平尾翼51、升降舵51a、垂直尾翼52、方向舵52a、动力机构6、驱动电机61、传动机构62、第一传感器7、第二传感器8。
具体实施方式
18.本发明的核心是提供一种无人直升机及其控制系统,以解决无人直升机升降或者悬停时,无人直升机难以保持平衡的问题。
19.为了使本领域的技术人员更好地理解本发明提供的技术方案,下面将结合附图和具体实施例对本发明作进一步的详细说明。
20.如图1
‑
图11所示,本发明实施例提供了一种无人直升机的控制系统,包括控制器、主旋翼1、用于操控主旋翼1变距的第一操控机构2、安装于无人直升机的两侧的机翼3,两侧的机翼3上均安装有推进机构4;当无人直升机处于升降或悬停状态时,控制器控制无人直升机的两侧的推进机构4进行差动,且使两侧的推进机构4所产生的水平差动力矩与主旋翼1旋转而产生的扭矩平衡。
21.该控制系统,在实际应用过程中,当无人直升机处于升降或悬停状态时,通过控制器控制无人直升机的两侧的推进机构进行差动,且使两侧的推进机构所产生的水平差动力矩与主旋翼旋转而产生的扭矩平衡,从而能够使得无人直升机升降或者悬停时保持平衡。
22.需要说明的是,本领域技术人员都应该能够理解的是,前述“控制无人直升机的两侧的推进机构进行差动”中的“差动”的含义是指无人直升机的两侧的推进机构所产生的推进力不相等的方式运动,继而能够产生的水平差动力矩来与主旋翼1旋转而产生的扭矩平衡。
23.在一些具体的实施方案中,两侧的推进机构4均用于对无人直升机产生斜向上的推进力;当无人直升机处于升降或悬停状态时,第一操控机构2控制主旋翼1向后倾斜预设角度,且使主旋翼1所产生的水平向后的分拉力与两侧的推进机构4所产生的水平向前的分推力的合力平衡。由于两侧的机翼上的推进机构一般安装角度会采用斜向上的方向,因此,通过主旋翼产生水平向后的分拉力来平衡推进机构所产生的向前推力,从而能够保证升降或悬停状态下的无人直升机在水平面内的受力平衡。
24.进一步的实施方案中,当无人直升机处于垂直升降状态时,主旋翼1的拉力和推进机构4的推力应该满足如下关系:机构4的推力应该满足如下关系:
式中,f1与f2分别为两侧的推进机构的推力,t为主旋翼的拉力,θ为主旋翼的倾斜角,β为推进机构的安装角,q为主旋翼旋转而产生的扭矩,l为直升机翼展,m为无人直升机重量,g为重力加速度,a为无人直升机在垂直方向的预期加速度。其中,无人直升机处于悬停状态时,a=g。
25.更进一步的实施方案中,该控制系统还可以包括用于监测无人直升机各个方向加速度的检测器,控制器根据检测器检测的数据实时对主旋翼1和推进机构4进行闭环控制调整,从而能够以推进机构4所消耗功率最小作为目标,计算推进机构4和主旋翼1所需的工作参数,通过检测器监测无人直升机在各个方向上的加速度,实时对主旋翼1和推进机构4进行调整实现控制闭环。
26.需要说明的是,一般来说,推进机构4具体可以为涵道风扇、螺旋桨和小型涡轮发动机中的一种或多种的组合构成,实际应用过程中,可以根据具体机型的不同进行具体配置,在此不做更具体的限定。
27.在一些具体的实施方案中,该控制系统,还包括应该用于驱动主旋翼1旋转的动力机构6、用于检测主旋翼1的桨叶所在位置的位置传感器和用于锁止主旋翼1的锁止机构;当无人直升机向前飞行的速度达到第一预设速度后,随着无人直升机向前飞行的速度的增加,控制器控制动力机构6驱动主旋翼1的旋转速度降低;且当无人直升机向前飞行的速度达到第二预设速度且位置传感器检测到主旋翼1的两片桨叶分别指向无人直升机的前方和后方时,锁止机构锁止主旋翼;当无人直升机向前飞行的速度低于第二预设速度时,锁止机构解锁主旋翼1,其中,第一预设速度小于第二预设速度。由于随着无人直升机飞行速度的增加,达到第一预设速度后,当飞行速度达到第二预设速度时,此时主旋翼的旋转速度已经降低至较低的旋转速度,此时再通过锁止机构进行锁止操作,能够有效避免高速旋翼突然锁死产生过大冲击。由于处于高速飞行状态时,也即速度超出第二预设速度时,此时推进机构提供向前飞行的主要动力,而飞机的升力主要由机翼提供。
28.需要说明的是,锁止机构具体可以通过动力机构6的驱动电机61自身的静态锁止功能实现,也可通过传动装置62中的机械结构实现,其属于常规技术,在此不做限定。
29.一般来说,第一预设速度v1与第二预设速度v2之间满足关系:v1=kv2,其中,k的取值为0.8
‑
0.9。其中,第二预设速度v2的计算方式具体为:式中,m为无人直升机的重量,g为重力加速度,ρ为大气密度,s为无人直升机的机翼面积,c
lα
为机翼翼型的升力线斜率,β为机翼的安装角。
30.在一些更具体的实施方案中,考虑到主旋翼的锁止动作的完成需要一定的缓冲,当位置传感器检测到主旋翼1的两片桨叶转动至提前于无人直升机的正前方预设角度或正后方预设角度时,锁止机构执行锁止动作,其中,提前于无人直升机的正前方预设角度或正后方预设角度具体可以为1
°‑5°
,实际应用过程中,可以根据实际需求进行选择配置对应的
预设角度,在此不做更具体的限定。
31.在一些更具体的实施方案中,机翼3具体可以包括主翼31、以可纵向偏转的方式安装于主翼31的副翼32和用于操控副翼32的纵向偏转角度的第二操控机构;当无人直升机向前飞行的速度达到第二预设速度时,控制器用于控制第一操控机构2将主旋翼1的桨距角降低至零,同时控制第二操控机构调节副翼32的纵向偏转角,以使无人直升机的整体升力与无人直升机的重力保持相等。在实际应用过程中,当无人直升机向前飞行的速度达到第二预设速度时,可以通过控制器控制第一操控机构将主旋翼的桨距角降低至零,此时主旋翼不产生升力,无人直升机的整体升力与无人直升机的重力保持相等的状态主要由控制器控制第二操控机构调节副翼的纵向偏转角来实现,从而能够降低主旋翼不平衡气动力对无人直升机飞行的影响;同时在平飞过程中能够确保主旋翼的转动平面与飞行方向夹角为0
°
,从而降低了主旋翼对无人直升机向前飞行时所产生的阻力和干扰,继而有助于提升无人直升机的飞行速度。
32.在一些具体的实施方案中,无人直升机还包括尾翼5,尾翼5具体可以包括水平尾翼51和垂直尾翼52,其中,水平尾翼51上可以设置有用于调节水平尾翼51的升降力矩的升降舵51a,垂直尾翼52上设置有用于调节垂直尾翼52的引导方向的方向舵52a;当无人直升机向前飞行的速度达到第二预设速度时,控制器控制第二操控机构调节副翼32的纵向偏转角以提升机翼3的上升力矩,同时控制升降舵51a提升水平尾翼的上升力矩,以使得无人直升机的整体升力与无人直升机的重力保持相等。通过设计水平尾翼及升降舵,可以配合机翼实现升力控制,能够避免副翼升力调节不足的问题。同时通过垂直尾翼及方向舵可以方便对飞行方向的控制。
33.在一些具体的实施方案中,当无人直升机向前飞行的速度达到第一预设速度且尚未达到第二预设速度时,控制器控制第一操控机构2将主旋翼1的桨距角降低,同时控制第二操控机构调节副翼32的纵向偏转角,以使主旋翼1和机翼3产生的整体升力与无人直升机的重力保持相等,其中,第一预设速度小于第二预设速度。通过上述控制方式,使得主旋翼的桨距角调节至零具有一个过渡阶段,同时机翼上的副翼的纵向偏转角的调节也实现了过渡,避免了桨距角调节过大或纵向偏转角过大导致飞行不稳定的情况发生。
34.进一步的实施方案中,当第一操控机构2操控主旋翼1的桨距角降低时,控制器控制第一操控机构2对主旋翼1执行周期变距,且保持主旋翼1上处于前行侧桨叶1a的桨距角低于主旋翼1上处于后行侧桨叶1b的桨距角,以使前行侧桨叶1a的升力与后行侧桨叶1b的升力平衡。通过上述调节方式,能够增强主旋翼两侧升力的平稳性,避免失去左右两侧失去平衡导致飞行不稳定。
35.在一些更具体的实施方案中,当第一操控机构2操控主旋翼1的桨距角降低时,具体可以采用如下方式:后行侧桨叶1b的桨距角保持预设最大值,前行侧桨叶1a的桨距角减小,该种方式主要针对于向前飞行速度逐渐加速的情况。
36.需要说明的是,上述前行侧桨叶1a的桨距角和后行侧桨叶1b的桨距角,具体可以按照如下公式得出:
其中,s为主旋翼的旋翼实度,θ0为旋翼的固定几何参数;c为桨叶翼型的升力线斜率;v为无人直升机的飞行速度;ω为主旋翼转动的角速度;r为主旋翼半径;ρ为大气密度;t为主旋翼产生的拉力;v
i
为主旋翼向下吹动的气流速度;θ1为前行侧桨叶的桨距角;θ2为后行侧桨叶的桨距角。
37.其中,后行侧桨叶1b的桨距角的预设最大值一般优选为15
°‑
20
°
。
38.需要说明的是,无人直升机还应该安装有各式各样的传感器以实现各种检测需求,比如在机翼处可以安装第一传感器7(具体可以为霍尔元件),通过该第一传感器可以检测机翼上的副翼的纵向偏转角度;机身的顶部可以设置第二传感器8(具体可以为光学传感器)。
39.另外,本发明还提供了一种无人直升机,包括控制系统,该控制系统为上述任一方案所描述的无人直升机的控制系统,由于该无人直升机的控制系统具有上述技术效果,因此具有该控制系统的无人直升机也应具有相应的技术效果,在此不再赘述。
40.以上对本发明所提供的无人直升机及其控制系统进行了详细介绍。需要说明的是,本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。
41.还需要说明的是,在本文中,诸如术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括上述要素的物品或者设备中还存在另外的相同要素。
42.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。