1.本公开涉及计算机技术领域,尤其涉及计算机视觉、自动驾驶、智能交通等技术领域。
背景技术:
2.如今,人们出行对地图、导航等工具的依赖程度越来越高,地图提供的信息的准确性,对用户能否正确到达目的地、能否避免违反交规等起到了重要的作用。
3.但道路上的静态要素也时常发生变化,若是地图数据更新不够及时,则用户无法及时根据道路环境中的静态要素的变化对出行、驾驶操作进行相应的必要调整。
技术实现要素:
4.本公开提供了一种道路图像数据处理方法、装置、电子设备、计算机存储介质及云计算平台。
5.根据本公开的一方面,提供了一种道路图像数据处理方法,包括:
6.检测获取到的道路图像中的第一静态元素;
7.根据道路图像的定位信息,在地图中确定与第一静态元素对应的第二静态元素;
8.将第一静态元素和第二静态元素进行对比,得到处理道路图像的对比结果。
9.根据本公开的另一方面,提供了一种道路图像数据处理装置,包括:
10.检测模块,用于检测获取到的道路图像中的第一静态元素;
11.定位信息模块,用于根据道路图像的定位信息,确定在地图中对应的第二静态元素;
12.对比模块,用于将第一静态元素和第二静态元素进行对比,得到处理道路图像的对比结果。
13.根据本公开的另一方面,提供了一种电子设备,包括:
14.至少一个处理器;以及
15.与该至少一个处理器通信连接的存储器;其中,
16.该存储器存储有可被该至少一个处理器执行的指令,该指令被该至少一个处理器执行,以使该至少一个处理器能够执行本公开任一实施例中的方法。
17.根据本公开的另一方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,该计算机指令用于使计算机执行本公开任一实施例中的方法。
18.根据本公开的另一方面,提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现本公开任一实施例中的方法。
19.根据本公开的另一方面,一种云计算平台,包括本公开任意一项实施例提供的电子设备。
20.根据本公开的技术,能够获取实际道路图像中的第一静态元素,在地图中与对应位置处的第二静态元素进行比较,获得比较结果,从而以便后续能够根据比较结果,结合实
际的道路图像状况对地图进行更改或者执行其它相关操作。有利于保持地图数据更新的及时性。
21.应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
附图说明
22.附图用于更好地理解本方案,不构成对本公开的限定。其中:
23.图1是根据本公开一实施例的道路图像数据处理方法示意图;
24.图2是根据本公开另一实施例的道路图像数据处理方法示意图;
25.图3是根据本公开又一实施例的道路图像数据处理方法示意图;
26.图4是根据本公开一示例的道路图像数据处理方法示意图;
27.图5是根据本公开另一示例的道路图像数据处理方法示意图;
28.图6是根据本公开一实施例的道路图像数据处理装置示意图;
29.图7是根据本公开另一实施例的道路图像数据处理装置示意图;
30.图8是根据本公开又一实施例的道路图像数据处理装置示意图;
31.图9是根据本公开又一实施例的道路图像数据处理装置示意图;
32.图10是根据本公开又一实施例的道路图像数据处理装置示意图;
33.图11是用来实现本公开实施例的道路图像数据处理方法的电子设备的框图。
具体实施方式
34.以下结合附图对本公开的示范性实施例做出说明,其中包括本公开实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本公开的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
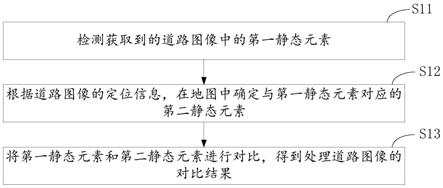
35.本公开实施例首先提供一种道路图像数据处理方法,如图1所示,包括:
36.步骤s11:检测获取到的道路图像中的第一静态元素;
37.步骤s12:根据道路图像的定位信息,在地图中确定与第一静态元素对应的第二静态元素;
38.步骤s13:将第一静态元素和第二静态元素进行对比,得到处理道路图像的对比结果。
39.本实施例中,道路图像可以是道路状况采集车辆实地采集到的道路视频中的图像。
40.第一静态元素可以是在实际道路环境中位置相对较为固定、短期内不会发生变化的元素。比如,道路护栏、道路分割护栏、道路维修标识、交通标识牌、红绿灯、绿化带、路灯、电线杆等等。
41.在一种具体实现方式中,在道路图像中出现的,且在路边长期停放、在较长时间内不曾发生移动的车辆,也可以被认为是第一静态元素。
42.本实施例中,第一静态元素还可以是道路中的所有位置相对固定的静态元素。比如,道路、建筑、天桥等等。
43.第一静态元素还可以是出现在道路图像中出现的,且能够显示在地图中的任意元素。
44.在道路图像中出现的,可能影响交通畅通性、通行速度或者方向性的,且在一定时间内相对位置固定不变的物体都可以被认为是第一静态元素。比如,路面绘制的车道线、斑马线等,也可以被认为是第一静态元素。
45.本实施例中,可以通过训练静态元素识别模型,使其识别道路中可能存在的各种静态元素。
46.针对不同地区,道路上的静态元素的外形风格可能有所区分。因此,在具体实现方式中,可针对不同地区训练不同的静态元素识别模型,对不同风格的静态元素进行识别。
47.针对不同类型的静态元素,可能为了提高识别的准确性,需要采用不同的识别方式。因此,在具体实现方式中,可针对不同类型的静态元素训练不同的静态元素识别模型,对不同类型的静态元素进行识别。
48.道路图像的定位信息,可以是道路图像的源数据采集时的采集设备定位信息。
49.地图中对应的第二静态元素,可以是在地图的道路元素中对应的在较长时间内位置相对固定的静态元素,具体可以是在高精地图中、道路上或道路两侧的与交通相关的静态元素。
50.本实施例中,根据道路图像的定位信息,确定在地图中对应的第二静态元素,可以是在道路图像采集时,采集设备所在的定位信息的范围内,确定与道路图像中的第一静态元素对应出现于地图中的静态元素,为第二静态元素。
51.比如,道路图像中出现长期固定的车辆,在高精地图同一位置处也存在车辆图标,则可确定车辆图标表示与道路图像中的长期固定车辆对应的第二静态元素;道路图像中出现交通规则指示牌,在高精地图同一位置处也存在同样的交通规则指示牌图标,则可确定交通规则指示牌图标表示与道路图像中的交通规则指示牌对应的第二静态元素。
52.根据道路图像的定位信息,确定在地图中对应的第二静态元素,还可以包括在地图中不存在与第一静态元素对应的元素的情况下,将空信息或者表明不存在对应第二静态元素的信息作为第二静态元素;还可以包括在地图中不存在与第一静态元素对应的元素的情况下,将对应位置的其它元素(道路等)作为第二静态元素。比如,道路图像中存在某个建筑,将该建筑确定为第一静态元素;但是在地图中,不存在该建筑,则可以将同位置处的交通信号灯作为第二静态元素。
53.根据道路图像的定位信息,确定在地图中对应的第二静态元素,还可以包括将第一静态元素的定位信息范围内在地图中对应的两个以上的静态元素作为第二静态元素。比如,若道路图像中存在一段道路,该道路的定位信息为道路覆盖范围,在道路覆盖范围内的地图中,存在指示牌、人行道、绿化带、天桥等多种静态元素,则可以将这些静态元素均作为与第一静态元素对应的第二静态元素。
54.在具体实施方式中,第一静态元素和对应的第二静态元素可以不完全一致。
55.比如,道路图像中存在交通灯,作为第一静态元素,在地图同样的位置处存在另一形状不同的交通灯图标,则可根据设置位置,将另一形状不同的交通灯确定为第二静态元素。
56.将第一静态元素和第二静态元素进行对比,得到处理道路图像的对比结果。具体
可以是确定第一静态元素和第二静态元素是否一致,即确定第一静态元素在地图中是否存在与其完全对应的第二静态元素。
57.本实施例中,能够获取实际道路图像中的第一静态元素,在地图中与对应位置处的第二静态元素进行比较,获得比较结果,从而以便后续能够根据比较结果,结合实际的道路图像状况对地图进行更改或者执行其它相关操作。有利于保持地图数据更新的及时性。
58.在一种实施方式中,第一静态元素包括规则形状的第一静态元素和不规则形状的第一静态元素;检测获取到的道路图像中的第一静态元素,包括:
59.采用目标检测网络,在道路图像中确定规则形状的第一静态元素;
60.采用语义分割网络,在道路图像中确定形状不规则的第一静态元素。
61.本实施例中,规则形状的第一静态元素,可以是规则的几何形状的静态元素,比如矩形、圆形、三角形、圆边矩形、圆边三角形、椭圆形、球形、部分球形、圆柱形、三角锥性、圆锥形、长方体形、正方体形等平面的几何形状、立体的几何形状或平面和立体结合的几何形状。
62.本实施例中,目标检测网络可以是任意具有目标检测功能的神经网络或神经网络模型。
63.比如,目标检测网络可以是端到端的神经网络,可以通过对目标物体所在的框选,实现对目标物体的检测。本公开实施例中的目标检测网络具体例如可以是,yolo(you only look once,你只看一次)、ssd(single shot multi box detector,单激发多盒探测)等网络。目标检测网络也可以是基于区域提名的神经网络,具体例如,r
‑
cnn(region convolutional neural network,区域卷积神经网络)、spp
‑
net(spatial pyramid pooling network,螺旋金字塔池化网络)、fast r
‑
cnn(快速r
‑
cnn)、faster r
‑
cnn、r
‑
fcn等网络。
64.形状不规则的第一静态元素,可以是不规则的平面几何图形、不规则的立体几何图形或不规则的平面几何图形与立体几何图形结合的不规则图形。
65.本实施例中,语义分割网络可以是能够实现图像的语义分割功能的网络。图像的语义分割是将输入图像中的每个像素分配一个语义类别,以得到像素化的密集分类。一般的语义分割架构可以被认为是一个编码器
‑
解码器网络。编码器通常是一个预训练的分类网络,比如vgg(visual geometry group network,视觉几何网络)、resnet(residual net,残差网络),在编码器的基础上,结合一个解码器网络。
66.在本公开实施例中,利用目标检测网络检测形状规则的第一静态元素,能够提高检测速度。利用语义分割网络检测不规则形状的第一静态元素,能够提高检测准确度。
67.在一种实现方式中,在道路图像包括道路视频中的帧图像的情况下,将第一静态元素和第二静态元素进行对比,得到对比结果,如图2所示,包括:
68.步骤s21:针对至少两个帧图像,计算其中一个帧图像中的第一静态元素与其它帧图像中对应的第一静态元素的交并比;
69.步骤s22:根据交并比,校验不同帧图像中的对应第一静态元素之间的关联关系;
70.步骤s23:根据关联关系,确定校验后的第一静态元素;
71.步骤s24:分别确定校验后的第一静态元素的属性信息,以及第二静态元素的属性信息;
72.步骤s25:利用第一静态元素的属性信息和第二静态元素的属性信息的差异,得到对比结果。
73.其中一个帧图像中的第一静态元素与其它帧图像中对应的第一静态元素的交并比,可以是两个相邻帧图像中同一静态元素的交并比;也可以是相隔时间较短的前后两个帧图像中同一静态元素的交并比。
74.本实施例中,根据交并比,校验不同帧图像中的对应第一静态元素之间的关联关系,可确定第一静态元素是否为静态,或是否为前处理网络错误检测到的物体。比如,在一种情况下,将动态物体错误检测为静态物体,通过对关联关系的校验,确定同一物体在不同图像帧中交并比很小,则可重新确定该物体非第一静态物体。再如,在另一种情况下,在道路图像中错误地检测出不存在的第一静态物体,通过和其它帧图像的关联关系校验,确定在其它帧图像中不存在关联的物体,从而重新确定未检测出该物体。
75.本实施例中,能够通过目标追踪,对第一静态物体识别是否正确进行校验。
76.在一种实施方式中,利用第一静态元素的属性信息和第二静态元素的属性信息的差异,得到对比结果,包括:
77.在差异高于第一阈值的情况下,根据校验后的第一静态元素和第二静态元素,生成不一致的对比结果。
78.在本实施例中,第一阈值可以设置为0,即在属性并非完全相同的情况下,即认为第一静态元素和第二静态元素不一致。
79.本实施例中,根据属性信息确定第一静态元素和对应的第二静态元素的一致性,从而能够以较快的速度排除一部分容易比较的静态元素,提高判断速度。
80.在一种实施方式中,利用第一静态元素的属性信息和第二静态元素的属性信息的差异,得到对比结果,如图3所示,包括:
81.步骤s31:在差异不高于第一阈值的情况下,获取校验后的第一静态元素在地图中对应的第一坐标;
82.步骤s32:根据第一坐标与第二静态元素的第二坐标,计算校验后的第一静态元素与第二静态元素的交并比;
83.步骤s33:在交并比小于第二阈值的情况下,根据校验后的第一静态元素与第二静态元素,生成对比结果。
84.本实施例中,第一阈值可以是0,如果差异不高于0,则第一静态元素和对应的第二静态元素之间属性不存在差异,在这种情况下,如果交并比比较大,则说明二者很可能是显示道路环境中相同的静态物体。如果第一静态物体和第二静态物体属性完全相同,但是交并比较小,则说明可能第二静态物体在道路环境中对应的静态物体发生了变化,比如形状、位置发生了变化等。
85.在一种实现方式中,第二阈值可以是100%,即第一静态元素和对应的第二静态元素如果不是完全重合,则可确定第一静态元素和对应的第二静态元素不一致。
86.本实施例中,通过对第一静态元素和第二静态元素进行进一步判断,能够再通过更细化的条件筛选出第一静态元素和对应的第二静态元素不一致的情况。
87.在一种实施方式中,获取校验后的第一静态元素在地图中的第一坐标,包括:
88.根据校验后的第一静态元素在图像中的主点的位置、图像的相机焦距、图像的相
机在世界坐标系中的旋转矩阵和平移矩阵,确定校验后的第一静态元素的世界坐标;
89.根据世界坐标,确定校验后的第一静态元素在地图中的第一坐标。
90.本实施例中,主点的位置可以是光轴与图像平面的交点。
91.在其它实施例中,相机也可以是其它图像或视频获取设备,如,录像机等。
92.本实施例中,将第一静态元素在地图中的信息转换为第一静态元素在现实世界中的世界坐标,从而能够便于后续对第一静态元素和对应的第二静态元素进行比较。
93.在一种实现方式中,道路图像数据处理方法还包括:
94.根据对比结果,对地图进行更改。
95.本实施例中,根据对比结果,对地图进行更改,主要可以包括根据对比结果,对地图进行纠正,使得地图中显示的数据与道路图像中一致。
96.本实施例中,根据对比结果,对地图进行更改,从而能够依据随时拍摄的道路图像对地图数据进行更新,道路图像既可以是行车记录仪拍下的画面,也可以是专门的采集车辆拍摄下的画面。通过道路图像对地图进行更改,能够保证在现实道路环境中的静态物体发生变化的情况下,地图中的数据也能够被及时更新。
97.在一种实施方式中,根据对比结果,对地图进行更改,包括:
98.将在道路图像中不存在对应的第一静态元素的第二静态元素,从地图中删除;
99.将不存在对应的第二静态元素的道路图像中的第一静态元素,添加到地图中。
100.在一种实现方式中,假设在地图中不存在与道路图像中的第一静态元素a完全对应的第二静态元素b的情况下,可认为道路图像中的第一静态元素a可能为最新增设,可在地图中加入第一静态元素a。
101.在一种实现方式中,假设在道路图像中不存在与地图中的第二静态元素c完全对应的第一静态元素d的情况下,可确定第二静态元素c在现实道路环境中已经被删除,可在地图中对该第二静态元素c进行删除。
102.本实施例中,能够根据对比结果,对地图中的静态元素进行添加或者删除,从而能够根据采集的道路图像,及时地对地图数据进行更新,提供为用户提供的地图服务的准确性。
103.本公开实施例还可应用于高精地图,支持高精地图全要素的云端更图技术方案,包括高精地图中的红绿灯、车道线、道路等静态信息进行更新。不仅能够对高精地图的静态图层中的全部静态要素进行对比和必要的更改处理,还能够对高精地图动态图层中的静态的要素进行对比和更改处理。本公开实施例还可运用于l4(level 4,4级)高精地图自动化更新项目。l4可以对应于高度自动化的自动驾驶车辆。该级别的自动驾驶车辆,在特定驾驶模式下,由系统负责执行车辆全部动态驾驶任务,即使驾驶员在特殊情况发生时未能对系统提出的干预请求作出反应。
104.在本公开一种示例中,道路图像数据处理方法包括如图4所示的步骤:
105.步骤s41:针对道路图像,采用目标检测网络和语义分割网络来分别识别红绿灯等标牌类要素、以及车道线等路面要素。
106.在本示例中,红绿灯等标牌类要素(要素可以相当于本公开其它实施例中的元素),几何形状比较标准,采用目标检测网络就可以识别;车道线等路面要素难以匡准,可以通过语义分割网络进行识别。在训练语义分割网络时,可将道路图像当做一个掩膜(mask)
进行学习,同时可训练语义分割网络识别路面要素的颜色、虚实等信息。
107.步骤s42:在道路对识别出的要素进行目标跟踪。
108.具体可以是,基于tracking
‑
by
‑
detection(探测跟踪)方法来实现要素的跟踪。跟踪的本质可以是在不同的时序的帧图像间进行相同要素的关联,通过计算交并比等参数,确定不同时序得到帧图像之间的要素关联性。
109.步骤s43:将高精地图中的要素投影到图像上,确定与图像中的要素对应的高精地图的要素,根据投影结果进行结构化信息的匹配。
110.步骤s44:根据投影结果和识别结果进行交叉对比,根据交叉对比的结果,输出现实中发送变更的要素。
111.在本示例中,可以实现对道路图像中的要素进行地图中要素的全局对比,提高变更识别的准确性。
112.本公开示例能够支持高精地图全要素的云端更图,快速高效发现地图全要素变更,并利用运营数据进行天级别更新。减少无人驾驶无人接管次数,实现地图数据更新过程的轻量化,支持众包,为无人驾驶落地提供有力保障。
113.本公开一种示例中,如图5所示,道路图像数据处理方法能够对道路素材采集车、行车记录仪、普通相机采集的数据进行处理,具体执行如下步骤:
114.步骤s51:获取相机(camera)采集的道路图像。道路图像包括多个第一静态要素。
115.步骤s52:获取高精地图(hdmap,high definition map)。高精地图包括多种第二静态要素。
116.步骤s53:对道路图像中的交通灯(traffic light)等规则要素进行检测(detection)。
117.步骤s54:对道路图像中的路面语义要素(lane semantic)等不规则要素进行分割(segmentation)。
118.步骤s55:基于高精地图进行结构匹配(structure matching)。可以将高精地图中的要素投影到道路图像。
119.步骤s56:对道路图像对应的多个帧图像进行目标跟踪。具体可以基于tracking by detection方法进行目标跟踪。
120.步骤s57:根据匹配结果和跟踪结果进行交叉比较,获得交叉差异(cross diff,cross difference)。进一步,可以获得交通灯等规则要素的差异57和车道线等不规则要素的差异58。
121.本公开实施例还提供一种道路图像数据处理装置,如图6所示,包括:
122.检测模块61,用于检测获取到的道路图像中的第一静态元素;
123.定位信息模块62,用于根据道路图像的定位信息,在地图中确定与第一静态元素对应的第二静态元素;
124.对比模块63,用于将第一静态元素和第二静态元素进行对比,得到处理道路图像的对比结果。
125.在一种实施方式中,第一静态元素包括规则形状的第一静态元素和不规则形状的第一静态元素;如图7所示,检测模块包括:
126.第一单元71,用于采用目标检测网络,在道路图像中确定规则形状的第一静态元
素;
127.第二单元72,用于采用语义分割网络,在道路图像中确定形状不规则的第一静态元素。
128.在一种实施方式中,在道路图像包括道路视频中的帧图像的情况下,如图8所示,对比模块包括:
129.交并比单元81,用于针对至少两个帧图像,计算其中一个帧图像中的第一静态元素与其它帧图像中对应的第一静态元素的交并比;
130.关联单元82,用于根据交并比,校验不同帧图像中的对应第一静态元素之间的关联关系;
131.确定单元83,用于根据关联关系,确定校验后的第一静态元素;
132.属性单元84,用于分别确定校验后的第一静态元素的属性信息,以及第二静态元素的属性信息;
133.结果单元85,用于利用第一静态元素的属性信息和第二静态元素的属性信息的差异,得到对比结果。
134.在一种实施方式中,结果单元还用于:
135.在差异高于第一阈值的情况下,根据校验后的第一静态元素和第二静态元素,生成不一致的对比结果。
136.在一种实施方式中,结果单元还用于:
137.在差异不高于第一阈值的情况下,获取校验后的第一静态元素在地图中对应的第一坐标;
138.根据第一坐标与第二静态元素的第二坐标,计算校验后的第一静态元素与第二静态元素的交并比;
139.在交并比小于第二阈值的情况下,根据校验后的第一静态元素与第二静态元素,生成对比结果。
140.在一种实施方式中,结果单元还用于:
141.根据校验后的第一静态元素在图像中的主点的位置、图像的相机焦距、图像的相机在世界坐标系中的旋转矩阵和平移矩阵,确定校验后的第一静态元素的世界坐标;
142.根据世界坐标,确定校验后的第一静态元素在地图中的第一坐标。
143.在一种实施方式中,如图9所示,道路图像数据处理装置还包括:
144.更改模块91,用于根据对比结果,对地图进行更改。
145.在一种实施方式中,如图10所示,更改模块包括:
146.删除单元101,用于将在道路图像中不存在对应的第一静态元素的第二静态元素,从地图中删除;
147.添加单元102,用于将不存在对应的第二静态元素的道路图像中的第一静态元素,添加到地图中。
148.本公开实施例各装置中的各单元、模块或子模块的功能可以参见上述方法实施例中的对应描述,在此不再赘述。
149.本公开实施例还提供一种云计算平台,该云计算平台包括本公开任意一项实施例所提供的电子设备。
150.在一种实施方式中,云计算平台在云端执行处理,包括图像视频处理和数据计算、地图更新等,云计算平台也可以称为中心系统、中心服务器、云端服务器、云服务器、云控平台、地图服务器、地图平台等。
151.具体而言,本公开实施例提供的电子设备,可以包括:
152.至少一个处理器;以及
153.与该至少一个处理器通信连接的存储器;其中,
154.该存储器存储有可被该至少一个处理器执行的指令,该指令被该至少一个处理器执行,以使该至少一个处理器能够执行本公开任一实施例中的方法。
155.根据本公开的另一方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,该计算机指令用于使计算机执行本公开任一实施例中的方法。
156.本公开实施例可以应用于计算机视觉、自动驾驶、智能交通等技术领域。
157.根据本公开的实施例,本公开还提供了一种电子设备、一种可读存储介质和一种计算机程序产品。
158.图11示出了可以用来实施本公开的实施例的示例电子设备110的示意性框图。电子设备旨在表示各种形式的数字计算机,诸如,膝上型计算机、台式计算机、工作台、个人数字助理、服务器、刀片式服务器、大型计算机、和其它适合的计算机。电子设备还可以表示各种形式的移动装置,诸如,个人数字处理、蜂窝电话、智能电话、可穿戴设备和其它类似的计算装置。本文所示的部件、它们的连接和关系、以及它们的功能仅仅作为示例,并且不意在限制本文中描述的和/或要求的本公开的实现。
159.如图11所示,电子设备110包括计算单元111,其可以根据存储在只读存储器(rom)112中的计算机程序或者从存储单元118加载到随机访问存储器(ram)113中的计算机程序来执行各种适当的动作和处理。在ram 113中,还可存储电子设备110操作所需的各种程序和数据。计算单元111、rom 112以及ram 113通过总线114彼此相连。输入输出(i/o)接口115也连接至总线114。
160.电子设备110中的多个部件连接至i/o接口115,包括:输入单元116,例如键盘、鼠标等;输出单元117,例如各种类型的显示器、扬声器等;存储单元118,例如磁盘、光盘等;以及通信单元119,例如网卡、调制解调器、无线通信收发机等。通信单元119允许电子设备110通过诸如因特网的计算机网络和/或各种电信网络与其他设备交换信息/数据。
161.计算单元111可以是各种具有处理和计算能力的通用和/或专用处理组件。计算单元111的一些示例包括但不限于中央处理单元(cpu)、图形处理单元(gpu)、各种专用的人工智能(ai)计算芯片、各种运行机器学习模型算法的计算单元、数字信号处理器(dsp)、以及任何适当的处理器、控制器、微控制器等。计算单元111执行上文所描述的各个方法和处理,例如道路图像数据处理方法。例如,在一些实施例中,道路图像数据处理方法可被实现为计算机软件程序,其被有形地包含于机器可读介质,例如存储单元118。在一些实施例中,计算机程序的部分或者全部可以经由rom 112和/或通信单元119而被载入和/或安装到电子设备110上。当计算机程序加载到ram 113并由计算单元111执行时,可以执行上文描述的道路图像数据处理方法的一个或多个步骤。备选地,在其他实施例中,计算单元111可以通过其他任何适当的方式(例如,借助于固件)而被配置为执行道路图像数据处理方法。
162.本文中以上描述的系统和技术的各种实施方式可以在数字电子电路系统、集成电
路系统、场可编程门阵列(fpga)、专用集成电路(asic)、专用标准产品(assp)、芯片上系统的系统(soc)、负载可编程逻辑设备(cpld)、计算机硬件、固件、软件、和/或它们的组合中实现。这些各种实施方式可以包括:实施在一个或者多个计算机程序中,该一个或者多个计算机程序可在包括至少一个可编程处理器的可编程系统上执行和/或解释,该可编程处理器可以是专用或者通用可编程处理器,可以从存储系统、至少一个输入装置、和至少一个输出装置接收数据和指令,并且将数据和指令传输至该存储系统、该至少一个输入装置、和该至少一个输出装置。
163.用于实施本公开的方法的程序代码可以采用一个或多个编程语言的任何组合来编写。这些程序代码可以提供给通用计算机、专用计算机或其他可编程数据处理装置的处理器或控制器,使得程序代码当由处理器或控制器执行时使流程图和/或框图中所规定的功能/操作被实施。程序代码可以完全在机器上执行、部分地在机器上执行,作为独立软件包部分地在机器上执行且部分地在远程机器上执行或完全在远程机器或服务器上执行。
164.在本公开的上下文中,机器可读介质可以是有形的介质,其可以包含或存储以供指令执行系统、装置或设备使用或与指令执行系统、装置或设备结合地使用的程序。机器可读介质可以是机器可读信号介质或机器可读储存介质。机器可读介质可以包括但不限于电子的、磁性的、光学的、电磁的、红外的、或半导体系统、装置或设备,或者上述内容的任何合适组合。机器可读存储介质的更具体示例会包括基于一个或多个线的电气连接、便携式计算机盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦除可编程只读存储器(eprom或快闪存储器)、光纤、便捷式紧凑盘只读存储器(cd
‑
rom)、光学储存设备、磁储存设备、或上述内容的任何合适组合。
165.为了提供与用户的交互,可以在计算机上实施此处描述的系统和技术,该计算机具有:用于向用户显示信息的显示装置(例如,crt(阴极射线管)或者lcd(液晶显示器)监视器);以及键盘和指向装置(例如,鼠标或者轨迹球),用户可以通过该键盘和该指向装置来将输入提供给计算机。其它种类的装置还可以用于提供与用户的交互;例如,提供给用户的反馈可以是任何形式的传感反馈(例如,视觉反馈、听觉反馈、或者触觉反馈);并且可以用任何形式(包括声输入、语音输入、或者触觉输入来接收来自用户的输入。
166.可以将此处描述的系统和技术实施在包括后台部件的计算系统(例如,作为数据服务器)、或者包括中间件部件的计算系统(例如,应用服务器)、或者包括前端部件的计算系统(例如,具有图形用户界面或者网络浏览器的用户计算机,用户可以通过该图形用户界面或者该网络浏览器来与此处描述的系统和技术的实施方式交互)、或者包括这种后台部件、中间件部件、或者前端部件的任何组合的计算系统中。可以通过任何形式或者介质的数字数据通信(例如,通信网络)来将系统的部件相互连接。通信网络的示例包括:局域网(lan)、广域网(wan)和互联网。
167.计算机系统可以包括客户端和服务器。客户端和服务器一般远离彼此并且通常通过通信网络进行交互。通过在相应的计算机上运行并且彼此具有客户端
‑
服务器关系的计算机程序来产生客户端和服务器的关系。
168.应该理解,可以使用上面所示的各种形式的流程,重新排序、增加或删除步骤。例如,本公开中记载的各步骤可以并行地执行也可以顺序地执行也可以不同的次序执行,只要能够实现本公开公开的技术方案所期望的结果,本文在此不进行限制。
169.上述具体实施方式,并不构成对本公开保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本公开的精神和原则之内所作的修改、等同替换和改进等,均应包含在本公开保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。