1.本发明涉及道面检测技术领域,尤其是一种车载道面检测机器人。
背景技术:
2.本文所述的道面包括机动车道、非机动车道、飞机起降航道等等。目前,现有技术中的车载道面检测多采用检测小车搭载探地雷达模块,其虽然结构较为简单;但是,其拖挂受力全靠小车。在实际检测过程中,道面并非完全平整,如机动车道上存在减速机构、道面存在坑洼、凸起区域。那么,现有技术中的车载道面检测机器人就存在探地雷达模块与地面碰撞的问题。另外,现有技术中探地雷达模块也有搭载独立的行进机构,其结构较为复杂;且离地距离大,采集数据不准确,不利于后期数据处理(即离地间距越大,检测数据失真越严重)。
3.另外,现有技术中的道面表观检测机器人和道面探地浅层检测机器人为独立式的,且现有技术中的表观检测机器人的相机采用固定连接方式,其拆卸更好操作较为复杂。
4.因此,急需要提出一种结构简单、安装可靠、防碰撞性能良好的车载道面检测机器人。
技术实现要素:
5.针对上述问题,本发明的目的在于提供一种车载道面检测机器人,本发明采用的技术方案如下:
6.一种车载道面检测机器人,其包括检测小车,设置在检测小车顶部、用于拍摄地面的图像的相机模块,拖挂在检测小车上的探地雷达检测机构;
7.所述探地雷达检测机构包括与检测小车的行进方向垂直布设的探地雷达和防撞导向板,以及分别与检测小车、探地雷达和防撞导向板连接的探地雷达搭载机构;
8.所述相机模块包括设置在检测小车的顶部的相机固定架,一一对应设置在相机固定架的两侧、且与相机固定架可拆卸连接的两个d相机。
9.进一步地,所述探地雷达搭载机构包括与检测小车的行进方向垂直布设的主支架,一一对应设置在主支架的两端部、且与检测小车固定连接的搭载连接杆,沿纵向方向一一对应固定在主支架的背部两端的滑轨,套设置在滑轨上的滑块,一一对应固定在主支架的两端部、与防撞导向板的前边缘轴接、且呈l形状的防撞导向板前连接杆,连接在主支架的两端部的滑块之间的横向联动板,一端与横向联动板的端部连接、且另一端与防撞导向板的后边缘轴接的防撞导向板后连接杆,与横向联动板的端部一一对应连接的锁定支撑架,以及设置在锁定支撑架上、用于探地雷达连接的锁定组件。
10.进一步地,所述锁定组件设置有两组,且任一组包括从下至上依次连接的探地雷达连接座、连接座延长板和挤压横条,设置在连接座延长板上的搭扣头,固定在锁定支撑架上的搭扣座,以及固定在搭扣座上、且与搭扣头匹配连接的搭扣;所述探地雷达连接座与探地雷达固定连接。
11.优选地,所述主支架为回字形状,且所述探地雷达的顶部设置有呈l形状的抬升限位杆;所述抬升限位杆一端固定在探地雷达上、且另一端插入主支架的回字形状内。
12.优选地,所述主支架的顶部设置有一防水罩。
13.优选地,所述主支架与横向联动板之间设置有一复位杆。
14.进一步地,所述相机固定架包括相机连接上座,设置在相机连接上座下部的连接机构,与相机连接上座下部连接、且置于连接机构外侧的连接机构罩。
15.更进一步地,所述连接机构包括设置在相机连接上座的底部的上顶板,一一对应设置在上顶板的两侧底部的锁定机构;所述d相机的顶部四角均开设有与锁定机构锁定匹配的锁孔。
16.更进一步地,任一所述锁定机构包括固定在上顶板的底部的锁具支撑架,设置在锁具支撑架的一端的定滑轮支架,设置在定滑轮支架上的定滑轮,相对固定在锁具支撑架的内侧、且与锁孔锁定匹配的第一锁具和第二锁具,一端与第一锁具连接、且绕定滑轮的表面边缘的联动绳,与联动绳的另一端连接、且用于驱动第二锁具动作的联动板,以及设置在联动板与第二锁具之间的联动侧板;所述第一锁具和第二锁具一一对应设置在锁具支撑架的内侧两端。
17.更进一步地,所述第一锁具和第二锁具的结构相同,且第一锁具包括固定在锁具支撑架上的锁具座,后端贯穿锁具座设置的锁头座,套设在锁头座的后端上、且挤压在锁具座与锁头座之间的复位弹簧,以及设置在锁头座的前端、且与锁孔一一对应匹配的锁头。
18.与现有技术相比,本发明具有以下有益效果:
19.(1)本发明巧妙地设置了l形状的防撞导向板前连接杆、防撞导向板后连接杆、防撞导向板、滑轨和滑块,当遇凸起区域时,利用防撞导向板下沿接触并联动防撞导向板后连接杆向上推移,并推动滑块(横向联动板、锁定支撑架、锁定组件、探地雷达)向上移动,以实现探地雷达防撞;
20.(2)本发明巧妙地设置了锁定组件,其设置了搭扣、搭扣头和挤压横条,其与探地雷达连接可靠,且拆装便捷;
21.(3)本发明巧妙地设置了两组滑轨和滑块,以及设置了复位杆,使得防撞动作平稳,复位可靠;
22.(4)本发明巧妙地在d相机的顶部四角均开设有与锁定机构锁定匹配的锁孔,并且在锁定机构上设置联动动作的两对第一锁具和两对第二锁具,以实现可靠的可拆卸连接;
23.(5)本发明巧妙地的设置了联动板,以实现两侧的第一锁具和第二锁具同步动作;
24.(6)本发明通过设置定滑轮和联动绳,以实现同一侧的第一锁具和第二锁具联动动作,其动作可靠;
25.综上所述,本发明具有结构简单、动作可靠、连接便捷、防撞性能良好等优点,在道面检测技术领域具有很高的实用价值和推广价值。
附图说明
26.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需使用的附图作简单介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对保护范围的限定,对于本领域技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附
图获得其他相关的附图。
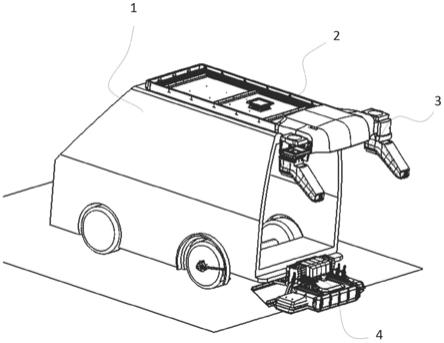
27.图1为本发明的结构示意图。
28.图2为本发明的车顶架及相机模块的结构示意图。
29.图3为本发明的相机模块的结构示意图(一)。
30.图4为本发明的相机模块的结构示意图(二)。
31.图5为本发明的连接机构的结构示意图(一)。
32.图6为本发明的连接机构的结构示意图(二)。
33.图7为本发明的第一锁具的结构示意图。
34.图8为本发明的第二锁具的结构示意图。
35.图9为本发明的3d相机的结构示意图。
36.图10为本发明的探地雷达检测机构的连接结构示意图。
37.图11为本发明的探地雷达检测机构的结构示意图。
38.图12为本发明的探地雷达检测机构的结构示意图(去防水罩)。
39.图13为本发明的探地雷达防撞连接机构的结构示意图。
40.图14为本发明的探地雷达防撞连接机构的结构示意图(去锁定组件)。
41.图15为本发明的锁定组件的结构示意图(一)。
42.图16为本发明的锁定组件的结构示意图(二)。
43.图17为本发明的探地雷达的结构示意图。
44.上述附图中,附图标记对应的部件名称如下:
45.1、检测小车;2、车顶架;3、相机模块;4、探地雷达检测机构;31、相机固定架;32、3d相机;41、探地雷达;42、探地雷达搭载机构;43、防撞导向板;44、防水罩;411、抬升限位杆;412、探地雷达连接座;413、连接座延长板;414、挤压横条;415、搭扣头;311、相机连接上座;312、连接机构罩;313、连接机构;321、锁孔;3131、上顶板;3132、锁具支撑架;3133、定滑轮支架;3134、定滑轮;3135、联动绳;3136、联动板;3137、第一锁具;3138、第二锁具;3139、联动侧板;4201、主支架;4202、搭载连接杆;4203、防撞导向板前连接杆;4204、滑轨;4205、滑块;4206、防撞导向板后连接杆;4207、横向联动板;4208、复位杆;4209、锁定支撑架;4210、锁定组件;31371、锁具座;31372、锁头座;31373、复位弹簧;31374、锁头;42101、搭扣座;42102、搭扣。
具体实施方式
46.为使本技术的目的、技术方案和优点更为清楚,下面结合附图和实施例对本发明作进一步说明,本发明的实施方式包括但不限于下列实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
47.实施例
48.如图1至图17所示,本实施例提供了一种车载道面检测机器人,其包括检测小车1,设置在检测小车1顶部、用于拍摄地面的图像的相机模块3,设置在检测小车1顶部、且与相机模块3连接的车顶架2,以及拖挂在检测小车1上的探地雷达检测机构4。首先,需要说明的是,本实施例中所述的“第一”、“第二”等序号用语仅用于区分同类部件,不能理解成对保护
范围的特定限定。另外,本实施例中所述“底部”、“顶部”、“四周边缘”、“中央”等方位性用语是基于附图来说明的。不仅如此,本实施例的3d相机的本体结构属于现有技术,其改进点在与连接位置。
49.如图2至图9所示,本实施例的相机模块3包括设置在检测小车1的顶部的相机固定架31,一一对应设置在相机固定架31的两侧、且与相机固定架31可拆卸连接的两个3d相机32。其中,相机固定架31包括相机连接上座311,设置在相机连接上座311下部的连接机构313,与相机连接上座311下部连接、且置于连接机构313外侧的连接机构罩312。在本实施例中,连接机构313与3d相机32为可拆卸连接。
50.在本实施例中,该连接机构313包括设置在相机连接上座311的底部的上顶板3131,一一对应设置在上顶板3131的两侧底部的锁定机构;所述3d相机32的顶部四角均开设有与锁定机构锁定匹配的锁孔321。任一所述锁定机构包括固定在上顶板3131的底部的锁具支撑架3132,设置在锁具支撑架3132的一端的定滑轮支架3133,设置在定滑轮支架3133上的定滑轮3134,相对固定在锁具支撑架3132的内侧、且与锁孔321锁定匹配的第一锁具3137和第二锁具3138,一端与第一锁具3137连接、且绕定滑轮3134的表面边缘的联动绳3135,与联动绳3135的另一端连接、且用于驱动第二锁具3138动作的联动板3136,以及设置在联动板3136与第二锁具3138之间的联动侧板3139;所述第一锁具3137和第二锁具3138一一对应设置在锁具支撑架3132的内侧两端。不仅如此,第一锁具3137和第二锁具3138的结构相同,且第一锁具3137包括固定在锁具支撑架3132上的锁具座31371,后端贯穿锁具座31371设置的锁头座31372,套设在锁头座31372的后端上、且挤压在锁具座31371与锁头座31372之间的复位弹簧31373,以及设置在锁头座31372的前端、且与锁孔321一一对应匹配的锁头31374。
51.在3d相机32安装时,向后拉动联动板3136,使得两对第一锁具3137和第二锁具3138的锁头座31372均回收,并压缩弹簧31373,使得锁头31374的间距大于锁孔321的间距;然后将3d相机32插入连接机构313内,并松下联动板3136,以实现锁头31374一一对应插入锁孔321内,以实现3d相机32锁定安装。在拆卸时,拉动联动板3136即可解除锁孔321与锁头31374连接。在本实施例中,通过设置定滑轮和联动绳,以实现同一侧的第一锁具和第二锁具联动动作。
52.如图10至图17所示,本实施例的探地雷达检测机构4包括与检测小车1的行进方向垂直布设的探地雷达41和防撞导向板43,以及分别与检测小车1、探地雷达41和防撞导向板43连接的探地雷达搭载机构42。
53.在本实施例中,为了实现探地雷达防撞,该探地雷达搭载机构42包括与检测小车1的行进方向垂直布设的主支架4201,一一对应设置在主支架4201的两端部、且与检测小车1固定连接的搭载连接杆4202,设置在主支架4201的顶部、用于探地雷达电气防护的防水罩44,沿纵向方向一一对应固定在主支架4201的背部两端的滑轨4204,套设置在滑轨4204上的滑块4205,一一对应固定在主支架4201的两端部、与防撞导向板43的前边缘轴接、且呈l形状的防撞导向板前连接杆4203,连接在主支架4201的两端部的滑块4205之间的横向联动板4207,设置在主支架4201与横向联动板4207之间的复位杆4208,一端与横向联动板4207的端部连接、且另一端与防撞导向板43的后边缘轴接的防撞导向板后连接杆4206,与横向联动板4207的端部一一对应连接的锁定支撑架4209,以及设置在锁定支撑架4209上、用于
探地雷达41连接的锁定组件4210。
54.在本实施例中,防撞导向板43的后端边缘以防撞导向板前连接杆4203与防撞导向板43轴接处进行转动,并且驱动防撞导向板后连接杆4206上下移动,并且带动滑块4205、横向联动板4207、锁定支撑架4209和锁定组件4210上下移动,以实现探地雷达防撞。即遇凸起,则防撞导向板43的后端抬升,探地雷达抬升。
55.为了实现探地雷达快速拆装,本实施例设置了两组锁定组件4210,且一一对应设置在横向联动板4207的两侧,且任一组包括从下至上依次连接的探地雷达连接座412、连接座延长板413和挤压横条414,设置在连接座延长板413上的搭扣头415,固定在锁定支撑架4209上的搭扣座42101,以及固定在搭扣座42101上、且与搭扣头415匹配连接的搭扣42102;所述探地雷达连接座412与探地雷达41固定连接。其中,探地雷达连接座412、连接座延长板413、挤压横条414和搭扣头415设置在探地雷达上。在抬升过程中,需要满足探地雷达采集时离地间距的要求,检测小车1移动过程中,若探地雷达无限位机构,在惯性的作用下,探地雷达抬升的高度是大于道面凸起的高度,本实施例为了保证探地雷达的离地间距,将主支架4201设置呈回字形状,且所述探地雷达41的顶部设置有呈l形状的抬升限位杆411;所述抬升限位杆411一端固定在探地雷达41上、且另一端插入主支架4201的回字形状内。本实施例的探地雷达41抬升高度等于主支架4201的回字形状的内部纵向间距与抬升限位杆411的直径差。
56.综上所述,本发明填补了道面检测技术中无探地雷达防撞的技术启示,并且兼顾探地雷达防撞和检测间距的要求,与现有技术相比,具有突出的实质性特点和显著的进步,在道面检测技术领域具有很高的实用价值和推广价值。
57.上述实施例仅为本发明的优选实施例,并非对本发明保护范围的限制,但凡采用本发明的设计原理,以及在此基础上进行非创造性劳动而作出的变化,均应属于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。