1.本发明属于医学图像处理技术领域,具体涉及一种经导管主动脉瓣置换术中造影建议投射角度的计算方法。
背景技术:
2.经导管主动脉瓣置换术(transcatheter aortic valve replacement,tavr)是一种微创瓣膜置换手术,是通过介入导管技术,将人工心脏瓣膜输送至主动脉瓣位置,从而完成人工瓣膜植入,恢复瓣膜功能。
3.在导管主动脉瓣置换术中,合适的植入位置和深度可以减少并发症,如传导阻滞、瓣周漏、栓塞、瓣膜返流和冠脉栓塞等。
4.为了在合适的位置和深度植入主动脉瓣,在术中需要通过血管造影进行定位。而为了准确定位,c型臂采用合适的成角显得至关重要。目前通常情况下,瓣膜的定位由介入医生借助3d医学图像软件通过复杂的手动交互来确定c型臂成角。这既要求医生的有较高的软件操作经验,并且需要花费不少时间,同时手动交互也很难保证其精确度。因此需要一种能够自动计算投射角度的方法,医生仅需根据已算出的角度直接调节c型臂即可,不仅大大减少术中操作的时间,还能够确保投射角的精度,保证造影效果。
技术实现要素:
5.本发明的目的是针对现有技术存在的不足,提供一种经导管主动脉瓣置换术中造影建议投射角度的计算方法,包括:
6.步骤1:获取主动脉瓣的三维医学图像数据;
7.步骤2:提取主动脉瓣三个窦的窦底坐标;
8.步骤3:识别三个窦的窦底名称,分别为左冠窦窦底、右冠窦窦底及无冠窦窦底,将所述窦底的坐标表示为:左冠窦窦底坐标lcc
(x,y,z)
,右冠窦窦底坐标rcc
(x,y,z)
,无冠窦窦底坐标ncc
(x,y,z)
;
9.步骤4:所述三个窦底组成虚拟瓣环平面,选取一垂直于所述虚拟瓣环平面的投影平面,所述三个窦底在该投影平面上的投影呈直线分布,且所述右冠窦窦底位于所述左冠窦窦底及所述无冠窦窦底连线的中间位置,在空间位置上,所述右冠窦窦底位于所述左冠窦窦底及所述无冠窦窦底的前方,将该模式设为第一模式,在该模式下,自动计算左/右前斜角度和头/足位角度θ1;
10.步骤5:选取一垂直于所述虚拟瓣环平面的投影平面,所述右冠窦窦底与左冠窦窦底在该投影平面上的投影重合,在空间位置上,所述右冠窦窦底位于所述左冠窦窦底的前方,将该模式设为第二模式,在该模式下,自动计算左/右前斜角度和头/足位角度θ2。
11.进一步地,所述三维医学图像数据可为任意包含人体主动脉瓣信息的医学图像数据。
12.进一步地,所述提取主动脉瓣窦底坐标可通过自动提取算法获取,或者通过手动
选取。
13.进一步地,所述识别三个窦底名称,可通过自动识别算法识别也可通过手动标记地方法进行识别。
14.进一步地,所述步骤4中,计算左/右前斜角度和头/足位角度θ1的方法为:
15.a.获取左冠窦窦底和无冠窦窦底连线的中点坐标mcc
(x,y,z)
;
[0016][0017][0018][0019]
b.获取投影向量prodirection;
[0020]
prodirection=rcc
‑
mcc
[0021]
prodirection
x
=rcc
x
‑
mcc
x
[0022]
prodirection
y
=rcc
y
‑
mcc
y
[0023]
prodirection
z
=rcc
z
‑
mcc
z
[0024]
c.计算建议投影角度之左/右前斜角度
[0025][0026]
即:
[0027]
当时,为右前斜,当时,为左前斜;
[0028]
d.计算建议投影角度之头/足位角度θ1[0029]
θ1=arctan2(prodirection
z
,prodirection
y
)
[0030]
即:
[0031]
当θ1>0时,为头位,当θ1<0时,为足位。
[0032]
进一步地,所述步骤5中,计算左/右前斜角度和头/足位角度θ2的方法为:
[0033]
a.获取投影向量prodirection;
[0034]
prodirection=rcc
‑
lcc
[0035]
prodirection
x
=rcc
x
‑
lcc
x
[0036]
prodirection
y
=rcc
y
‑
lcc
y
[0037]
prodirection
z
=rcc
z
‑
lcc
z
[0038]
b.计算建议投影角度之左/右前斜角度
[0039][0040]
即:
[0041]
当时,为右前斜,当时,为左前斜;
[0042]
c.计算建议投影角度之头/足位角度θ2;
[0043]
θ2=arctan2(prodirection
z
,prodirection
y
)
[0044]
即:θ2=arctan2(rcc
z
‑
lcc
z
,rcc
y
‑
lcc
y
)
[0045]
当θ2>0时,为头位,当θ2<0时,为足位。
[0046]
本发明的技术效果:
[0047]
应用本发明的技术方案可有效降低医生的操作难度,缩短手术时间,并能提高投射角度的精准度,提高造影效果,从而帮助医生更好地开展经导管主动脉瓣置换术。
附图说明
[0048]
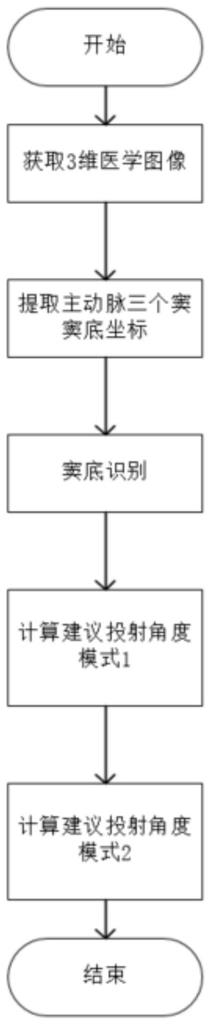
图1本发明的经导管主动脉瓣置换术中造影建议投射角度的计算方法流程示意图;
[0049]
图2本发明的经导管主动脉瓣置换术中造影建议投射角度的计算方法的步骤4中,第一模式下的影像示意图;
[0050]
图3本发明的经导管主动脉瓣置换术中造影建议投射角度的计算方法的步骤5中,第二模式下的影像示意图。
具体实施方式
[0051]
下面结合具体实施例,进一步阐述本发明。应理解,实施例仅用于说明本发明而不用于限制本发明的保护范围。此外,应理解,在阅读了本发明所公开的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本发明所限定的保护范围之内。
[0052]
如图1所示,本发明的经导管主动脉瓣置换术中造影建议投射角度的计算方法包括以下5个步骤:
[0053]
步骤1:获取主动脉瓣的三维医学图像数据。具体来说,上述三维医学图像数据应包含人体主动脉瓣信息,可为任意医学图像数据类型,例如ct/mri/us等模态。
[0054]
步骤2:提取主动脉瓣三个窦的窦底坐标。具体来说,上述提取主动脉瓣三个窦的窦底坐标的方法可为自动提取算法获取,或者通过手动选取。自动提取算法可为机器学习方法,也可为分水岭算法等传统图像处理算法,手动提取方法可通过三维图像浏览工具,利用多平面重建(mpr)功能,通过手动选择提取三个窦的窦底坐标。
[0055]
步骤3:识别三个窦的窦底名称。三个窦分别为左冠窦(lcc)、右冠窦(rcc)和无冠窦(ncc)。具体来说,上述识别三个窦的窦底名称的方法可为可通过自动识别算法识别也可通过手动标记地方法进行识别,自动识别算法可为机器学习方法,可为根据主动脉瓣结构特征通过传统图像处理方法实现,也可通过手动标记的方法进行识别。将窦底坐标表示为:左冠窦窦底坐标lcc
(x,y,z)
,右冠窦窦底坐标rcc
(x,y,z)
,无冠窦窦底坐标ncc
(x,y,z)
。
[0056]
步骤4:三个窦底组成虚拟瓣环平面,选取一垂直于该虚拟瓣环平面的投影平面,三个窦底在该投影平面上的投影呈直线分布,关于上述投影,右冠窦窦底(rcc)位于左冠窦窦底(lcc)及无冠窦窦底(ncc)连线的中间位置,在空间位置上,右冠窦窦底(rcc)位于左冠窦窦底(lcc)及所述无冠窦窦底(ncc)的前方,即右冠窦窦底(rcc)相对于其他两个窦底更靠近观察者一侧,如图2所示,将该模式设为第一模式,在该模式下,自动计算左/右前斜角度如头/足位角度θ1的方法为:
[0057]
a.获取左冠窦窦底和无冠窦窦底连线的中点坐标mcc
(x,y,z)
;
[0058][0059][0060][0061]
b.获取投影向量prodirection;
[0062]
prodirection=rcc
‑
mcc
[0063]
prodirection
x
=rcc
x
‑
mcc
x
[0064]
prodirection
y
=rcc
y
‑
mcc
y
[0065]
prodirection
z
=rcc
z
‑
mcc
z
[0066]
c.计算建议投影角度之左/右前斜角度
[0067][0068]
即:
[0069]
当时,为右前斜,当时,为左前斜;
[0070]
d.计算建议投影角度之头/足位角度θ1[0071]
θ1=arctan2(prodirection
z
,prodirection
y
)
[0072]
即:
[0073]
当θ1>0时,为头位,当θ1<0时,为足位。
[0074]
步骤5:选取一垂直于所述虚拟瓣环平面的投影平面,右冠窦窦底(rcc)与左冠窦窦底(lcc)在该投影平面上的投影重合,在空间位置上,右冠窦窦底(rcc)位于左冠窦窦底(lcc)的前方,即右冠窦窦底(rcc)比左冠窦窦底(lcc)更靠近观察者一侧,如图3所示,将该模式设为第二模式,在该模式下,自动计算左/右前斜角度和头/足位角度θ2的方法为:
[0075]
a.获取投影向量prodirection;
[0076]
prodirection=rcc
‑
lcc
[0077]
prodirection
x
=rcc
x
‑
lcc
x
[0078]
prodirection
y
=rcc
y
‑‑
lcc
y
[0079]
prodirection
z
=rcc
z
‑
lcc
z
[0080]
b.计算建议投影角度之左/右前斜角度
[0081][0082]
即:
[0083]
当时,为右前斜,当时,为左前斜;
[0084]
c.计算建议投影角度之头/足位角度θ2;
[0085]
θ2=arctan2(prodirection
z
,prodirection
y
)
[0086]
即:θ2=arctan2(rcc
z
‑
lcc
z
,rcc
y
‑
lcc
y
)
[0087]
当θ2>0时,为头位,当θ2<0时,为足位。
[0088]
以上对本发明的实施方式进行了说明。但是,本发明不限定于上述实施方式。凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。