配备有电驱动装置的可骑乘鞍式车辆的控制系统
1.描述
2.本发明涉及摩托车和可骑乘鞍式机动车辆领域。特别地,本发明涉及一种用于摩托车、轻便摩托车或三轮车类型的可骑乘鞍式车辆的控制系统,该鞍式车辆配备有电驱动装置(并且更准确地说,配备有至少一个电动机)。本发明还涉及一种包括这种控制系统的可骑乘鞍式车辆。
背景技术:
3.各种类型的摩托车(或更一般的可骑乘鞍式车辆)中的一种是通过使用电动机而不是吸热式发动机来进行推进的。通常,电动机包括永磁转子和定子,该定子包括由交流电供电的三相定子绕组。还已知的是,控制单元用于管理电动机的操作,为此提供了dc/ac电子转换器(逆变器)。控制单元建立电流值,该值的电流必须通过电动机的定子绕组,以传递给定的转矩(即,电动机的速度),并且因此车辆的速度增加或减少。控制单元产生脉宽调制(pwm)型信号,该信号由逆变器接收作为输入,该逆变器基于该信号向电动机供电。
4.还已知的是,有必要知道转子和形成定子相的定子绕组之间的相对位置,以即时控制永磁电动机。为此,通常提供物理传感器(例如解算器或绝对值编码器)来测量转子相对于定子的绝对位置。至少如果电动机连接到车轮,则由传感器检测的位置由适当的计算装置重新处理,以向电动机的控制单元提供表征电动机或车辆的速度的信号。
5.然而,规范电动摩托车型式认证的规定要求提供至少两个车速读取/采集系统。这是为了在任何一个系统出现故障或被篡改的情况下确保车辆的运行。特别地,规定要求这种速度采集系统相互独立,并且从工程的角度来看是不同的。换句话说,这种速度采集系统必须以相同的方式检测速度,并且必须不能在结构上相等。
6.因此,申请人已经确定需要提供一种能够符合前述规定的技术解决方案,而这种解决方案不会使车辆的设计复杂化。同时,已经发现需要一种关于车辆速度读数的更可靠的技术解决方案。
7.概述
8.鉴于上述考虑,本发明的主要任务是提供一种用于电动可骑乘鞍式车辆的控制系统,该控制系统包括从工程的角度来看不同的至少两个系统来检测/采集车辆速度。作为该任务的一部分,本发明的第一目的是提供一种车辆控制系统,其中机动车辆的两个速度采集系统对车辆的配置没有显著影响并且因此对车辆的设计没有显著影响。本发明的又一个目的是提供一种控制系统,该控制系统可靠并且易于以有竞争力的成本制造。
9.本发明基于通过组合物理和逻辑读取装置来实现上述目的的一般考虑。为了本发明的目的,物理读数是指基本上传统类型的读数,其中速度是通过物理位置传感器采集的,该传感器直接或间接地检测转子相对于定子或车轮相对于车辆的固定元件的位置。相反,逻辑读取装置表示用于计算速度的装置,该速度是基于区分电动机运行的电参数的变化的估计并且更精确地是基于由于转子运动而在定子绕组中产生的反电动势的变化的估计来计算的。
10.特别地,上述任务和目的是通过一种可骑乘鞍式车辆来实现的,该车辆包括:
11.‑
电力牵引电机,其包括定子和转子;
12.‑
第一车辆速度测量传感器,其被配置为产生表征车辆速度特征的第一信号;
13.‑
车辆的控制系统,包括:
14.‑
第一单元,其用于给所述电动机供电和控制所述电动机,其中所述第一单元基于控制信号来给所述电动机供电和控制所述电动机,所述控制信号表征所述电动机所需的转矩;
15.‑
计算单元,该计算单元被配置为产生表征车辆速度的第二信号,其中,所述计算单元包括第一计算装置,该第一计算装置被配置为基于由所述电动机产生的反电动势来计算所述转子相对于所述定子的角位置,并且其中,所述第二信号是基于由所述计算装置计算的所述位置的值来产生的;
16.其中,所述控制信号是基于转矩信号和基于表征所述车辆速度的所述第一信号和/或所述第二信号来产生的。
17.除了满足上述型式认证标准之外,由于上述两个速度读取系统的存在,根据本发明的车辆特别可靠。第一个是物理类型的,其由包括位置传感器的传感器装置组成。第二个是逻辑类型的,其由前面提到的计算单元组成。两个系统的存在允许优化电动机的控制,因为来自两个读取系统的信息或者来自被认为对于给定运行条件更可靠的系统的信息可以用于电动机的运行。在这方面,根据优选的实施例,在低速的情况下,控制可以基于物理读取系统提供的信息,而对于高速,控制可以基于逻辑系统提供的信息。
18.根据可能的实施例,传感器装置包括位置传感器,该位置传感器适于检测车轮相对于轮轴的位置(或者是通过齿轮级联直接连接到电动机的车轮),能够检测转子相对于所述定子的位置,并且其中,所述第一信号是根据由所述位置传感器检测的所述位置的值产生的。
19.根据可能的实施例,计算单元包括电连接到所述计算装置的处理装置;所述处理装置在输入端接收由所述计算装置发送的信号,并且在输出端产生表征所述车辆速度的所述第二信号。
20.根据可能的实施例,第二控制单元包括第一处理模块,该第一处理模块在输入端接收表征所述车辆速度的这种信号,其中,所述第一模块比较所述信号,在输出端产生所述车辆速度的参考信号;
21.‑
第二处理模块,其在输入端接收由第一模块产生的所述参考信号和由所述车辆的驾驶员设定的参考转矩信号;第二模块在输出端产生控制信号,该控制信号表征电动机所需的转矩。
22.优选地,电动机的第一供电和控制单元包括电连接到电动机以确定驱动的逆变器模块。
23.优选地,第一单元包括电连接到所述逆变器模块和计算单元的计算装置的传感器模块,其中所述传感器模块包括检测所述逆变器模块的电参数的传感器并且向所述计算装置提供表征电参数值的信号。
24.根据可能的实施例,电动机的第一控制单元和电源还包括:
25.‑
第一计算模块,其在输入端接收表征速度的所述信号,其中所述第一计算模块产
生表征所述转子相对于所述定子的位置的信号;
26.‑
第二计算模块,其在输入端接收由所述第一计算模块产生的所述信号和由第二控制单元产生的所述控制信号,其中所述第二计算模块产生由所述逆变器模块在输入端接收的控制信号。
27.根据一个实施例,给电动机供电和控制电动机的控制信号是基于车辆的运行条件(特别是其速度)产生的。
28.具体地:
29.‑
当车辆速度低于第一速度阈值时,仅基于所述转矩信号和基于所述车辆的所述第一特征速度信号产生控制信号;
30.‑
当车辆速度高于或等于第二速度阈值时,仅基于所述转矩信号和基于所述车辆的所述第二特征速度信号产生控制信号;
31.‑
当车辆速度高于或等于所述第一速度阈值并且低于所述第二速度阈值时,基于所述转矩信号并且基于所述第一信号和表征所述车辆速度的所述第二信号产生控制信号。
32.附图列表
33.参考附图,根据通过非限制性示例的方式公开的摩托车的一些优选但非排他性实施例的以下详细描述的讨论,本发明的另外的特征和优点将变得更加明显,在附图中:
34.‑
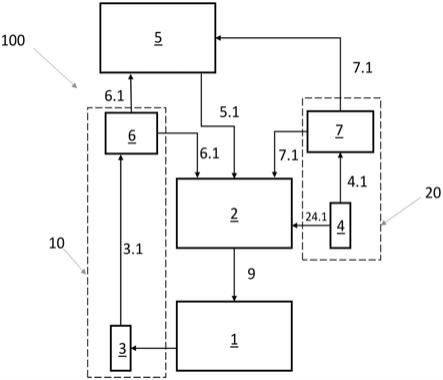
图1是根据本发明的摩托车控制系统的框图;
35.‑
图2是图1中一个框的框图;
36.‑
图3是图1中另一个框的框图;
37.‑
图4是包括根据本发明的电动机控制系统的可骑乘鞍式车辆的示意图。
38.附图之间共有的元件或元件的部分将由附图中相同的附图标记来表示。
39.详细描述
40.参考前述附图,根据本发明的包括控制系统100的摩托车由附图标记200表示。该控制系统可以在任何可骑乘鞍式车辆上实现,无论是轻便摩托车、摩托车、配备有电驱动装置(即其推进力由电动机(在附图中用附图标记1表示)产生)的三轮车。电动机1包括定子和转子,转子具有永磁体,相对于定子绕其轴线旋转。根据本身已知的解决方案,定子包括三相定子绕组,其可以被供应交流电以确定转子的旋转。
41.根据本发明的控制系统包括用于给电动机1供电和控制电动机1的第一单元2和用于控制摩托车的第二单元5。第二单元5具有管理组合仪表和/或向其传输车辆速度信息的功能。同时,第二单元5为用户/驾驶员形成对话界面,通过该对话界面设定电动机1的运行(加速、减速等)。换句话说,第二单元5接收来自驾驶员的关于车辆(即,电动机1)是否将加速的信息。
42.两个单元2和5是电连通的。特别地,第二单元5在输出端产生控制信号5.1,该控制信号5.1表征电动机1所需的转矩或所需的速度变化。第一单元2在输入端接收所述控制信号5.1,以给电动机1的定子绕组供电和控制电动机1的定子绕组(也是基于车辆的真实速度)。
43.根据本发明,控制系统100包括在图1中由虚线框和附图标记10整体示出的传感器装置。这种传感器装置10包括至少一个位置传感器3,位置传感器3检测运动部件的位置,运动部件的速度表征摩托车的速度。如果位置传感器3通过机械传动装置连接到车辆200的车
轮,则位置传感器3可以放置在车辆200的车轮或电动机的转子上。传感器装置10还包括处理装置6,以用于处理由位置传感器3提供的信号3.1,并产生表征摩托车的速度的第一信号6.1。特别地,信号6.1被处理为由位置传感器3检测的位置的时间导数。
44.控制系统100还包括计算单元,其在图1中由与附图标记20相关联的虚线框整体示出。计算单元20被配置为产生表征所述车辆的速度的第二7.1信号。计算单元20包括计算装置4,计算装置4被配置为计算电动机转子1的转子相对于定子的角位置。特别地,这种计算基于对转子上存在的磁体在定子相上产生的反电动势的估计。本质上,计算装置4被配置为根据电动机模型1并且根据影响负责给同一电动机1供电和控制同一电动机1的第一单元2的运行的电参数(电流和/或电压强度)来估计转子相对于定子的位置。
45.计算单元20包括电连接到计算装置4以在输入端接收信号4.1的处理设备7,该信号4.1表征由计算装置4自身计算的角位置。基于这样的角位置,处理装置7产生表征摩托车的速度的第二信号7.1。由处理装置7估计的速度作为位置的导数而被获得,在这种情况下不被检测,而是由计算装置4基于转子的旋转产生的反电动势而被计算。
46.换句话说,第二信号7.1源自角位置计算,该角位置计算基于电参数,而不是基于物理传感器对旋转部件位置的检测。
47.根据本发明,第二单元5和第一单元2连接到传感器装置10和计算单元20,以在输入端接收表征摩托车的速度的第一信号6.1和第二信号7.1。
48.参考图3,根据优选实施例,第二单元5包括第一处理模块51,该第一处理模块51在输入端接收表征摩托车的速度的两个信号6.1、7.1。第二单元5还包括电连接到第一模块51的第二处理模块52。第一模块51比较在输入端接收的两个信号6.1和7.1,并产生第一参考信号51.1,该第一参考信号51.1被传输到第二模块52。这种参考信号51.1是基于第一模块51的输入端的信号6.1、7.1的可靠性产生的。这种可靠性取决于车辆的实际速度。特别地,根据优选实施例,在低车辆速度或低于第一预定速度阈值的速度,第二模块52仅考虑由传感器装置10产生的第一信号6.1来产生第一参考信号51.1。对于高速度或低于或等于第二速度阈值的速度,第二模块52仅考虑由传感器装置10产生的第二信号7.1来产生第一参考信号51.1,因为逻辑信号更可靠。另一方面,当速度在所述第一阈值和所述第二速度阈值之间时,输入到第一模块51的两个信号6.1、7.1基本上是可比较的,并且两者都被使用。如果两个信号显著不同,则第一模块51可以被配置为发出故障信号。
49.换句话说,在低速时,由传感器装置10(即物理传感器)产生的信息(第一信号6.1)被认为更可靠,而在高速时,由计算单元20计算的速度值(第二信号7.1)被认为更可靠。
50.该第一参考信号51.1(其也表征车辆速度)被传输到第二处理模块52。后者在输入端接收由车辆驾驶员产生的或在任何情况下设定的至少第二参考信号8。本质上,驾驶员通过适当的命令/仪表向第二单元5传达加速或不加速车辆的意图。基于上面定义的两个参考信号51.1和8,第二模块52产生传输到第一单元2的输入端的控制信号5.1。本质上,第二模块52接收由第一模块51验证的第一参考信号51.1和表征驾驶员加速意图的信号8。例如,如果加速的意图确实如此,则需要第二模块52来提高电动机1的速度。当达到最大速度时,即使用户的加速请求持续存在,第二模块52也取消加速参考。换句话说,第二模块52不考虑包含在第二信号8中的超过预设最大速度值(包含在第一参考信号51.1中的信息)的信息,实际上充当转矩限制器。
51.图2是电动机1的第一供电和控制单元2的优选设计的框图。第一单元2包括至少一个逆变器模块23,该逆变器模块23通过连接9电连接到电动机1,以确定电动机1的致动。逆变器模块23通过调节电动机1的绕组的电流强度来执行本身已知的功能。
52.第一单元2包括传感器模块24,该传感器模块24检测表征电动机运行的电流强度和电压。因此,传感器模块24电连接到逆变器23,以在输入端采集信号23.1,该信号23.1表征上述电计量。传感器模块24产生24.1信号,该24.1信号表征由计算单元20的计算装置4在输入端采集的这些计量。基于传感器模块24发送的该信号,计算装置估计由转子相对于定子的运动产生的反电动势。
53.第一单元2还包括第一计算模块21,该第一计算模块21接收分别由传感器设备10和计算单元20产生的两个特征车辆速度信号6.1和7.1作为输入。第一模块21处理输入端处的两个信号6.1和7.1,产生第二参考信号21.1,该第二参考信号21.1表征转子相对于定子的位置。
54.在输入端从第一单元2的第二计算模块22接收该第二参考信号21.1。该第二模块22还在输入端接收由摩托车的第二控制单元5发送的控制信号5.1。第二模块22计算必须通过定子绕组的电流的值,并产生控制信号22.1(优选为pwm型电流信号),该信号在输入端被逆变器23接收。基于该控制信号,逆变器23给电动机1供电并且控制电动机1。
55.再次参考图2,根据优选实施例,为了产生参考信号21.1(参考信号21.1表征转子相对于定子的瞬时位置),当速度值低于所述第一速度阈值时,第一模块21仅考虑由传感器装置10提供的第一信号6.1。当速度值超过第二速度阈值时,第一模块21考虑由计算单元20产生的第二信号7.1。
56.换句话说,为了以低速启动,第一模块21利用由传感器装置10提供的信息,该传感器装置10即使在零速度条件下也能检测车辆200的速度。当电机启动时,由计算单元20产生的信息也变得可用。所述第二阈值的值是根据传感器设备10和计算单元20的配置建立的,通常它可以是25km/h至35km/h之间的速度(优选等于30km/h)。相反,第一阈值可以是15km/h至20km/h之间的速度。在包括在所述第一速度阈值和所述第二速度阈值之间的间隔中,随着车辆速度的增加,第一信号6.1逐渐变得不如第二信号7.1可靠。
57.本发明还涉及包括根据本发明的控制系统的可骑乘鞍式车辆200。表述“可骑乘鞍式车辆”指任何两轮、三轮或四轮车辆,该车辆配备有用于运送一人或更多人的鞍座,并为此其配备有电动机。因此,根据本发明的车辆的特征在于基于使用两种不同方法来确定电动机1或车辆200的速度值的控制系统。因此,第一种方法基于通过物理传感器检测转子速度或位置,而第二种方法基于计算由转子相对于定子的旋转产生的反电动势。
58.这两种不同模式的使用允许解决和实现预设目标,同时给予控制高度的可靠性。
59.根据本描述的本发明的各个方面和实施例由以下条款定义:
60.1)一种具有可骑乘鞍座的电动车辆的控制系统,其中所述车辆包括电动机(1),该电动机(1)包括定子和转子,其中所述控制系统包括:
61.‑
所述车辆的第一控制单元(5);
62.‑
第二单元(2),其用于给所述电动机(1)供电和控制所述电动机(1),其中所述第二单元(2)基于由所述第一单元(5)发送的控制信号(5.1)来给所述电动机(1)供电和控制所述电动机(1),所述控制信号(5.1)表征所述电动机(1)所需的转矩;
63.‑
传感器装置(10),其包括位置传感器(3)和处理装置(6),以用于处理由所述位置传感器(3)提供的信号(3.1)并产生表征所述车辆速度的第一信号(6.1);
64.‑
计算单元(20),其被配置为产生表征所述车辆速度的第二信号(7.1),其中所述计算单元(20)包括第一计算装置(4),其被配置为基于由所述电动机(1)产生的反电动势来计算所述转子相对于所述定子的角位置,并且其中所述第二信号(7.1)是基于由所述计算装置(4)计算的所述位置的值产生的;
65.其中所述控制信号(5.1)是基于预定的参考转矩信号(8)并且基于表征所述车辆速度的所述第一信号(6.1)和/或所述第二信号(7.1)产生的,并且
66.其中所述第二单元(2)基于所述控制信号(5.1)、所述第一信号(6.1)和/或所述第二信号(7.1)来给所述电动机(1)供电和控制所述电动机(1)。
67.2)根据条款1所述的控制系统,其中所述传感器装置(10)包括适于检测所述转子相对于所述定子的位置的位置传感器(3),并且其中所述第一信号(6.1)是基于由所述位置传感器(3)检测的所述位置的值产生的。
68.3)根据条款1或2所述的控制系统,其中所述计算单元(20)包括电连接到所述计算装置(4)的处理装置(7),所述处理装置(7)在输入端接收由所述计算装置(4)发送的信号(4.1),并在输出端产生表征所述车辆速度的所述第二信号(7.1)。
69.4)根据条款1至3中任一项所述的控制系统,其中所述单元(5)包括:
70.‑
第一处理模块(51),其在输入端接收表征所述车辆速度的所述信号(6.1,7.1),其中所述第一模块(51)比较所述信号,在输出端产生所述车辆速度的参考信号(51.1);
71.‑
第二处理模块(52),其在输入端接收由所述第一模块(51)产生的所述参考信号(51.1)和由所述车辆的驾驶员设定的参考转矩信号(8),所述第二模块(52)在输出端产生所述控制信号(5.1),所述控制信号(5.1)表征所述电动机(1)所需的转矩。
72.5)根据条款4所述的控制系统,其中在预定速度值下,所述第二模块(52)仅考虑所述第一信号(6.1)来产生所述第一参考信号(51.1),并且其中,在所述预定速度值之上,所述第二模块(52)仅考虑所述第二信号(7.1)来产生所述参考信号(51.1)。
73.6)根据条款1至5中任一项所述的控制系统,其中所述第二单元(2)包括逆变器模块(23),该逆变器模块(23)电连接到所述电动机(1)以确定其致动。
74.7)根据条款6所述的控制系统,其中所述第二单元(2)包括电连接到所述逆变器模块(23)和所述计算单元(20)的所述计算装置(4)的传感器模块(24),其中所述传感器模块包括传感器,该传感器检测所述逆变器模块(23)的电参数并向所述计算装置(4)提供表征所述电参数的值的信号。
75.8)根据条款6至7中任一项所述的控制系统,其中所述第二单元(2)包括:
76.‑
第一计算模块(21),其在输入端接收表征所述速度的所述信号(6.1,7.1),其中,所述第一计算模块(21)产生表征所述转子相对于所述定子的位置的信号(21.1);
77.‑
第二计算模块(22),其在输入端接收由所述第一计算模块(21)产生的所述信号(21.1)和由所述第一控制单元(5)产生的所述控制信号(5.1),其中所述第二计算模块(22)产生由所述逆变器模块(23)在输入端接收的控制信号(22.1)。
78.9)根据条款8所述的控制系统,其中,当所述车辆的速度低于预定值时,所述第一计算模块(21)仅考虑所述第一信号(6.1)来产生所述参考信号(21.1),所述参考信号
(21.1)表征所述转子的位置,并且其中,当所述车辆的速度高于所述预定值时,所述第二计算模块(22)仅考虑所述第二信号(7.1)来产生所述参考信号(21.1)。
79.10)一种具有电驱动装置的可骑乘鞍式车辆(200),其中所述车辆包括电动机(1)和根据条款1至9中任一项的所述电动机的控制系统,所述电动机(1)包括定子和转子。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。