1.本发明涉及磁性材料特性建模技术领域,尤其涉及一种电工钢片磁致伸缩模型的建模方法。
背景技术:
2.众所周知,电机(包括旋转电机和变压器)中的大部分振动和噪声是由电工钢片中的磁致伸缩引起的,尤其是变压器中的电工钢片。因此,开发精确的磁致伸缩模型有助于降低电机和变压器设计状态下的振动和噪声。然而,电机和变压器的不同工作状态所对应的各种不同的磁化条件下,如交替和旋转磁化条件下,磁致伸缩特性是相当复杂的。
3.迄今为止,文献ieee transactions on magnetic,56(3):7514604,2020(an improved magnetostriction model for electrical steel sheet based on jiles
–
atherton model)介绍了基于jiles
‑
atherton模型改进的电工钢片磁致伸缩模型,文献ieee transactions on magnetic,33(5):pp.3931
‑
3933,1997(utilizing anisotropic preisach
‑
type models in the accurate simulation of magnetostriction)介绍了在磁致伸缩的精确模拟中利用的各向异性preisach型模型,文献ieee transactions on magnetic,51(5):6000407,2015(modeling 2
‑
dmagnetostriction in nonoriented electrical steels using a simple magnetic domain model)介绍了模拟无取向电工钢的二维磁致伸缩的磁畴模型,文献international conference on electrical machines(icem),2014(two
‑
dimensional magnetostriction analysis using e&s
‑
w model in induction motor model core)介绍了在感应电机模型铁芯中进行二维磁致伸缩分析的e&s
‑
w模型。在上述模型中,由于preisach模型具有精度高、易于实现、具有物理意义等优点,在磁滞领域得到了广泛的研究。由于磁致伸缩特性被认为与磁滞特性相似,因此已经开发了一些基于preisach模型的磁致伸缩模型。而且有的只能模拟磁致伸缩的最大值和最小值,有的只能模拟交变磁场下的磁致伸缩。然而,旋转磁场分布在电机中,在分析瞬态振动和噪声特性时需要瞬态磁致伸缩特性。上述几种模型不能同时满足模拟矢量磁致伸缩和估算瞬态磁致伸缩的需求。
技术实现要素:
4.本发明的目的在于提供一种电工钢片磁致伸缩模型的建模方法,不仅可以描述矢量磁致伸缩特性,还可以通过计算估算出旋转磁场下的瞬态磁致伸缩。
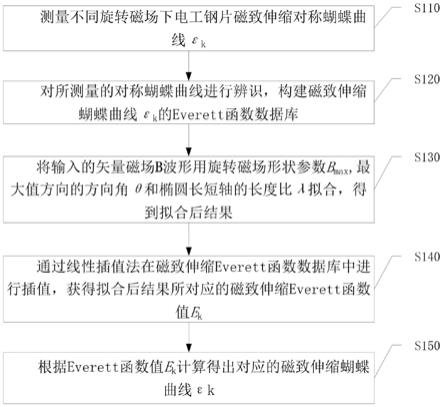
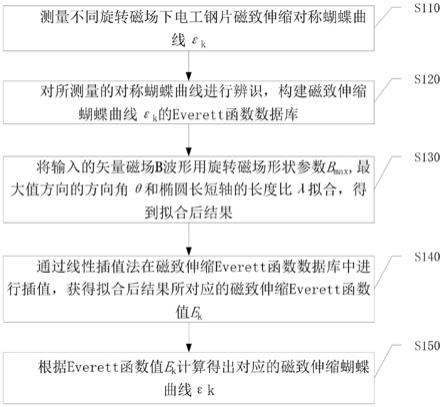
5.为了实现上述目的,本发明提供一种电工钢片磁致伸缩模型的建模方法,包括:
6.测量不同旋转磁场下电工钢片磁致伸缩对称蝴蝶曲线ε
k
;
7.对所测量的对称蝴蝶曲线进行辨识,构建磁致伸缩蝴蝶曲线ε
k
的everett函数数据库;
8.将输入的矢量磁场b波形用旋转磁场形状参数b
max
,最大值方向的方向角θ和椭圆长短轴的长度比λ拟合,得到拟合后结果;
9.通过线性插值法在磁致伸缩everett函数数据库中进行插值,获得拟合后结果所对应的磁致伸缩everett函数值e
k
;
10.根据everett函数值e
k
计算得出对应的磁致伸缩蝴蝶曲线εk。
11.可选的,对所测量的对称蝴蝶曲线进行辨识,构建磁致伸缩蝴蝶曲线ε
k
的everett函数数据库的步骤为:
12.在磁感应强度最大值b
max
为b
a
的一旋转磁场(θ0,λ0)下,测量对称蝴蝶曲线;
13.计算矢量磁场点为(b
a
,
‑
b
a
)的磁致伸缩everett函数为第一函数值εa;
14.利用测量曲线计算其他点(b
a
,b
b
)点的磁致伸缩everett函数为第二函数值(εa
‑
εb)/2,b
b
为不同于
‑
b
a
的其他值;其中,εa、εb分别是b=b
a
、b=b
b
时的磁致伸缩值,εa、εb是测量对称蝴蝶曲线上的值,蝴蝶曲线纵轴是磁致伸缩值ε,横轴是磁感应强度b;
15.通过磁致伸缩everett函数关于直线α=
‑
β的对称性,获得对称点的函数值,并且α为磁致伸缩算子的正向翻转阈值,β为磁致伸缩算子的负向翻转阈值;
16.分别计算每条测量的蝴蝶回线对应的everett函数值e
k
,并基于所计算的函数值建立磁致伸缩everett函数数据库。
17.一种实现方式中,根据everett函数值e
k
计算得出对应的磁致伸缩蝴蝶曲线εk的公式为:
[0018][0019]
其中,b
t
为输入波形极值存储器中的极值序列,θ为最大值方向的方向角,λ为椭圆长短轴的长度比。
[0020]
一种实现方式中,基于preisach模型的磁致伸缩模型表示为:
[0021]
ε
k
(t)=∫∫
α≥β
μ
k
(θ,λ,α,β)γ
αβ
(b
k
(t))dαdβ
[0022]
其中,γ
αβ
为磁致伸缩算子,并且α为其正向翻转阈值,β为其负向翻转阈值,θ为最大值方向的方向角,λ为椭圆长短轴的长度比;μ
k
(θ,λ,α,β)是输入旋转磁场形状参数拟合成规则椭圆形后形状参数θ和λ的函数,b
k
(t)为t时刻k方向上的波形。
[0023]
应用本发明实施例提供的一种电工钢片磁致伸缩模型的建模方法,具备的有益效果如下:
[0024]
(1)建立的新型磁致伸缩模型,可以计算不同磁场下电工钢片磁致伸缩特性随时间变化的瞬时值。
[0025]
(2)通过建立磁致伸缩everett函数数据库,简化了preisach模型的计算过程。
附图说明
[0026]
图1是本发明实施例一种电工钢片磁致伸缩模型的建模方法的一种流程示意图。
[0027]
图2a是35ph105硅钢片在交变磁场下:当θ=20
°
时,不同b
max
的实测主磁致伸缩应变ε
x
的蝴蝶曲线。
[0028]
图2b是35ph105硅钢片在交变磁场下:当b
max
=1.0t时,不同θ的实测主磁致伸缩应
变ε
x
的蝴蝶曲线。
[0029]
图3a是在旋转磁场下,当θ=20
°
时,不同b
max
的实测主磁致伸缩应变ε
x
的蝴蝶曲线。
[0030]
图3b是在旋转磁场下,当b
max
=1.0t时,不同θ的实测主磁致伸缩应变ε
x
的蝴蝶曲线。
[0031]
图4是当b
max
=b
a
时的对称磁致伸缩蝴蝶曲线示意图。
[0032]
图5a为ε
x
和b
x
的everett函数:m=ε
x
,n=b
x
。
[0033]
图5b为ε
y
和b
y
的everett函数:m=ε
y
,n=b
y
。
[0034]
图5c为ε
xy
和b
x2
b
y2
的everett函数:m=ε
xy
,n=b
x2
b
y2
。
[0035]
图6是为磁滞算子示意图。
[0036]
图7为输入b波形拟合成旋转磁场椭圆轨迹示意图。
[0037]
图8为preisach平面示意图。
[0038]
图9为本发明线性插值法的插值过程。
[0039]
图10为极值存储器存储输入矢量b波形的极值过程。
[0040]
图11a、图11b、图11c、图11d为35ph105硅钢片在不同输入b波形下模拟和测量的磁致伸缩结果的比较。
具体实施方式
[0041]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。
[0042]
如图1本发明提供一种电工钢片磁致伸缩模型的建模方法,包括:
[0043]
s110,测量不同旋转磁场下电工钢片磁致伸缩对称蝴蝶曲线ε
k
。
[0044]
需要说明的是,在圆形二维单片应变仪里测量电工钢片在多种矢量磁场条件下的磁致伸缩ε
k
,输入矢量磁场的x轴和y轴分量,可以通过圆形二维单片应变仪里固定在定子上的两个相线圈产生,通过控制线圈的电流可以产生任意旋转磁场。通过测量得到的一部分磁致伸缩蝴蝶曲线如图2a、图2b、图3a、图3b,图中的磁滞特性曲线是基于韩国浦项钢铁公司型号为35ph105的硅钢片测量得到的。
[0045]
具体的,在交变磁场下测量得到:如图2a所示,是当θ=20
°
时,不同b
max
的实测主磁致伸缩应变ε
x
的蝴蝶曲线;如图2b所示,是当b
max
=1.0t时,不同θ的实测主磁致伸缩应变ε
x
的蝴蝶曲线。在旋转磁场下测量得到:如图3a所示,是当θ=20
°
时,不同b
max
的实测主磁致伸缩应变ε
x
的蝴蝶曲线;如图3b所示,是当b
max
=1.0t时,不同θ的实测主磁致伸缩应变ε
x
的蝴蝶曲线。
[0046]
s120,对所测量的对称蝴蝶曲线进行辨识,构建磁致伸缩蝴蝶曲线ε
k
的everett函数数据库。
[0047]
可以理解的是,磁致伸缩everett函数数据库的构建需要依靠测量的对称蝴蝶曲线进行辨识,其辨识步骤如下:
[0048]
(1)在磁感应强度最大值b
max
为矢量磁场点为b
a
的某一给定旋转磁场(θ0,λ0)下测
量如图4所示的对称蝴蝶曲线;其中,θ为最大值方向的方向角,λ为椭圆长短轴的长度比。θ0λ0表示给定的确定值。
[0049]
(2)计算点(b
a
,
‑
b
a
)的磁致伸缩everett函数为e(θ0,λ0,b
a
,
‑
b
a
)=ε
a
;
[0050]
(3)利用测量曲线计算其他点(b
a
,b
b
)点的磁致伸缩everett函数为e(θ0,λ0,b
a
,b
b
)=(ε
a
‑
ε
b
)/2;
[0051]
(4)利用磁致伸缩everett函数关于直线α=
‑
β的对称性,得到对称点的函数值。
[0052]
(5)重复上述步骤1~4,分别计算每条测量的蝴蝶回线对应的函数值e
k
(θ,λ,b,b),并建立磁致伸缩everett函数数据库。
[0053]
s130,将输入的矢量磁场b波形用旋转磁场形状参数b
max
,最大值方向的方向角θ和椭圆长短轴的长度比λ拟合,得到拟合后结果。
[0054]
需要说明的是,本发明使用的拟合方法为最小二乘近似法:
[0055][0056][0057]
θ=∠(b
x
(τ
max
),b
y
(τ
max
))
[0058][0059]
其中,τ
max
表示矢量b波形最大时的方向角,b
x
和b
y
分别是输入矢量b波形的x方向和y方向的分量,τ
i
表示第i时刻的方向角,b
max
表示b波形的最大值,τ表示某个时刻的方向角,b是输入的矢量磁场b波形,为非椭圆波形;b是椭圆波形,n
b
是输入的矢量磁场b波形的采样点数。τ=ωt,ω表示角速度,t表示时刻,τ表示某个时刻的方向角。
[0060]
需要说明的是,将输入的b波形拟合成规则椭圆形后形状参数θ和λ的函数,其中θ为最大值方向的方向角,λ为椭圆长短轴的长度比,如图5a、图5b、图5c是施加在35ph105硅钢片上的旋转磁场为(θ=30
°
,λ=0.3)时,everett函数数据库的结果:图5a是ε
x
和b
x
的everett函数,m=ε
x
,n=b
x
;如图5b是ε
y
和b
y
的everett函数,m=ε
y
,n=b
y
;如图5c是ε
xy
和b
x2
b
y2
的everett函数,m=ε
xy
,n=b
x2
b
y2
。
[0061]
s140,通过线性插值法在磁致伸缩everett函数数据库中进行插值,获得拟合后结果所对应的磁致伸缩everett函数值e
k
。
[0062]
插值方法如图9所示,已知everett函数值e(q
ij
)为点q
ij
(θ
i
,λ
j
)的everett函数值,其中,θ
i
参数θ第i个数,λ
j
为参数λ的第j个数;
[0063]
(1)在θ轴方向上进行插值求得点q
a1
(θ
a
,λ1)的everett函数值:
[0064][0065]
其中,θ
r
,λ1,q
11
、q
21
、θ1,θ2、e(q
11
)、e(q
21
)见图示。
[0066]
(2)在θ轴方向上进行插值求得点q
a2
(θ
a
,λ2)的everett函数值:
[0067]
[0068]
其中,λ2,q
12
、q
22
、e(q
12
)、e(q
22
)见图示。
[0069]
(3)在λ轴方向上进行插值求得点q
ab
(θ
a
,λ
b
)的everett函数值:
[0070][0071]
其中,λ
r
,λ1、λ2、r1,r2、e(r2)、e(r1)见图示。
[0072]
通过上述线性插值法在磁致伸缩everett函数数据库中进行插值,求得拟合后结果所对应的磁致伸缩everett函数值e
k
。
[0073]
s150,根据everett函数值e
k
计算得出对应的磁致伸缩蝴蝶曲线ε
k
。
[0074]
需要说明的是,本发明基于preisach模型理论,提出一种可以考虑相应矢量磁场下的主磁致伸缩和剪切磁致伸缩的磁致伸缩模型。基于preisach模型的磁致伸缩模型表示为:
[0075]
ε
k
(t)=∫∫
α≥β
μ
k
(θ,λ,α,β)γ
αβ
(b
k
(t))dαdβ
ꢀꢀ
(1)
[0076]
式(1)中,下标k分别表示x,y和xy,则ε
x
和ε
y
分别表示x和y方向的主磁致伸缩,ε
xy
表示剪切磁致伸缩。b
x
和b
y
分别是输入b波形的x方向和y方向的分量,并且γ
αβ
为磁致伸缩算子,并且α为其正向 1翻转阈值,β为其负向
‑
1翻转阈值,如图6所示,定义如下:
[0077][0078]
式(2)中,t
i
是输入b波形的时间步长,μ
x
、μ
y
、μ
xy
分别为主磁致伸缩和剪切磁致伸缩算子对应的分布函数,该分布函数根据不同磁场激励下的磁致伸缩测量曲线计算得到。μ
x
、μ
y
和μ
xy
不仅是阈值α和β的函数,而且是输入b波形拟合成规则椭圆形后形状参数θ和λ的函数,其中θ为最大值方向的方向角,λ为椭圆长短轴的长度比,如图7所示。
[0079]
从preisach磁致伸缩模型的定义式(1)可知,式中的积分区域是一个三角形区域,称为preisach平面,如图8所示。
[0080]
在preisach平面中,每个点都代表一种磁滞算子。根据输入的矢量磁场,历史依赖阶梯线l(t)将preisach平面分为t
(t)和t
‑
(t)部分,其磁滞算子的值分别为 1和
‑
1。所以preisach磁致伸缩模型的定义式(1)可以表示为:
[0081][0082]
本发明所提出的preisach磁致伸缩模型,引入磁致伸缩everett函数e
k
(θ,λ,α,β),用来代替分布函数μ
k
。在给定磁场(θ0,λ0),它所对应的定义式的积分区域,如图8所示,在这个区域里给定一点(α0,β0)((α0,β0)是preisach平面上给定的一个点)的everett函数定义如下:
[0083][0084]
通过式(3)和式(4),可以把preisach磁致伸缩模型的定义式(1)的复杂计算转换成如下公式:
[0085][0086]
其中,b1为输入波形极值存储器中序号为1的极值序列、b2为输入波形极值存储器中序号为2的极值序列、b
t
为输入波形极值存储器中序号为t的极值序列,n表示t的最大值。极值存储器存储输入矢量b波形的极值过程,如图10所示。其大小排序如下:
[0087]
|b1|>|b3|>
···
>|b
2i
‑1|
[0088]
|b2|>|b4|>
···
>|b
2i
|
[0089]
|b1|>|b2|
[0090]
经过上述计算,可以求得定义式(1)中preisach平面上的everett函数值e
k
,从而得出对应的磁致伸缩蝴蝶曲线εk。
[0091]
图11a为交变磁场b
max
=1.0t,θ=80
°
,λ=0,图11b为旋转磁场b
max
=1.0t,θ=30
°
,λ=0.3,图11c为旋转磁场b
max
=1.0t,θ=40
°
,λ=0.1,图11d为旋转磁场b
max
=1.0t,θ=40
°
,λ=0.2,通过比较了型号为35ph105硅钢片在不同磁场下基于本发明模型得到的磁致伸缩曲线和测量结果,其中虚线代表模型计算曲线,实线代表测量曲线。结果表明本发明提出的模型结果与试验结果基本吻合,本模型可以预测出与实际情况接近的磁致伸缩特性。
[0092]
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。