1.本发明属于激光熔覆技术领域,特别涉及一种激光熔覆自适应扫描路径规划方法。
背景技术:
2.激光熔覆作为一种环保、清洁的技术广泛应用于表面工程领域,尤其在材料表面强化,零件损伤修复等行业影响深远。与传统机械制造技术相比,利用激光熔覆技术制备的合金涂层与基体之间具有较高的结合强度和较小的稀释率,并且合金涂层通常会由于激光能量密度过大和冷却速度过快的影响而发生细晶强化,获得综合性能远高于基体的表面。同时,激光熔覆技术具有低成本高效益的优点,这些优点使激光熔覆技术获得越来越多的关注。
3.但由于激光熔覆过程中加载激光能量过大,熔池冷却速度过快,非常容易造成熔覆层和基材之间温度梯度过大,温度场分布不均,进而产生局部热应力,导致基材扭曲变形和熔覆层裂纹倾向,严重影响基材加工成型质量,尤其是焊接性能较差的低碳钢基材和大尺寸的薄壁零件。
4.目前,减轻激光熔覆热应力的方法主要包括自然时效和人工时效处理,人工时效主要指加工前预热,加工后热处理或者附加振动、敲击等方法,但是这些传统的工艺方法不但延长了产品加工的周期,增加了成本,而且对工作人员的操作能力要求较高。研究表明,温度场是影响激光熔覆产生热应力的关键因素,而改变激光熔覆加工工艺参数是改善温度分布不均的有效途径,并且可以大大减少后续处理的成本,其中激光熔覆扫描路径的优化是减少残余热应力的重要方法。当前激光熔覆扫描路径大多使用单向逐次扫描、双向逐次扫描和螺旋扫描,扫描路径一经确定几乎不会改变,这也是基材容易产生残余热应力引发变形和裂纹的原因之一,因此,规划一种合理有效、并且随着基材表面温度场变化而改变熔覆方向和次序的激光熔覆扫描路径至关重要。
技术实现要素:
5.为了克服现有技术中存在的不足,本发明提供一种基于瞬态温度场反馈的激光熔覆自适应扫描路径规划方法,以降低激光熔覆加工过程中的残余应力、减少工件的变形,获得组织致密,力学性能优异的合金涂层。
6.为实现上述目的,本发明采用的技术方案为:
7.一种基于瞬态温度场反馈的激光熔覆自适应扫描路径规划方法,包括以下步骤:
8.(1)将待加工工件表面划分若干块区,熔覆路径在块区单独规划,某一块区熔覆完成后再进行下一块区的熔覆;
9.(2)以块区内的瞬时平均温度作为确定各块区熔覆顺序的依据,在上一块区熔覆结束的时刻,瞬时平均温度最低的尚未熔覆块区确定为下一顺序进行熔覆的块区;
10.(3)在块区内部,将熔覆路径分为若干分道,各分道相互搭接覆盖整个块区;
11.(4)以分道内的瞬时平均温度作为确定各分道扫描次序的依据,在上一分道扫描结束的时刻,瞬时平均温度最低的尚未扫描的分道确定为下一次序进行扫描的分道;
12.(5)以瞬时温度低的端点至瞬时温度高的端点的方向作为分道的方向,将分道划分为若干子段,各子段的扫描次序按分道的方向依次确定,各子段内的扫描方向与其所在分道的方向相反。
13.所述步骤(1)中,块区数目为奇数。
14.所述步骤(2)中,以处于或最邻近待加工工件表面几何中心的块区作为第一顺序的块区,首先进行熔覆。
15.所述步骤(3)中,分道数目为偶数。
16.所述步骤(4)中,以处于或最邻近区块几何中心的分道作为第一次序的分道,开始进行扫描。
17.所述步骤(5)中,当两端点的瞬时温度相等时,分道的方向为任一端点到另一端点。
18.所述块区内的瞬时平均温度、分道内的瞬时平均温度、分道端点的瞬时温度由在线实时监测法或离线数值模拟法获得。
19.所述在线实时监测法采用红外热像仪等非接触测量手段,在激光熔覆过程中实时获取各时刻的瞬态温度分布,提取并计算对应时刻的块区内的瞬时平均温度、分道内的瞬时平均温度、分道端点的瞬时温度。
20.所述离线数值模拟法采用有限元温度场仿真等数值计算手段,在激光熔覆实施前计算各时刻的瞬态温度分布,提取对应时刻的块区内的瞬时平均温度、分道内的瞬时平均温度、分道端点的瞬时温度。
21.有益效果:本发明提供的基于瞬态温度场反馈的激光熔覆自适应扫描路径规划方法,具有以下优点:
22.(1)温度场分布均匀,熔覆层质量好。本发明采用了基于温度场反馈规划扫描路径的方法,每次扫描的起点均为工件表面温度最低点,可以降低基材温度梯度,均匀温度场,从而避免熔覆层开裂和基体塑性变形。
23.(2)基材热变形小。本发明采用分段熔覆的方法,第一道熔覆路径扫描方向从熔覆区中心指向基材外侧。基材中残余热应力在熔覆过程中相互抵消,并且有效减少了熔池的持续加热时间,从而避免基材温度过高引起变形。
24.(3)成本低、生产周期短。与传统的减轻激光熔覆热应力方法相比,本发明中熔覆后的基材不需要后续处理,大大减少了后续处理成本、缩短了生产周期。
25.(4)适应范围广。本发明中扫描路径的方向和次序由上一道熔覆路径加工后决定,扫描的方向和次序是动态变化的,所以对于热物性参数不同的基体材料,本发明提供的方案能降低温度梯度,均匀温度场,获得变形量小,涂层质量良好的工件。所以对于不同形状、不同材料的待加工工件,均可采用本发明提供的扫描路径规划方案。
附图说明
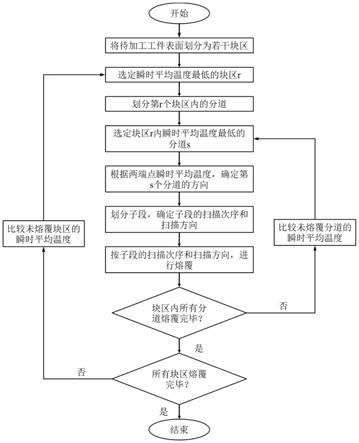
26.图1为本发明的方法流程图;
27.图2为本发明的实施例中熔覆区的路径规划情况示意图。
具体实施方式
28.下面结合附图对本发明作更进一步的说明。
29.本发明以“块区—分道—子段”三级结构设计激光熔覆扫描路径;进行块区和分道熔覆的次序由激光熔覆瞬态温度确定,在某一块区或分道熔覆结束的时刻,瞬态温度最低的未熔覆块区或未扫描分道进行下一次序的熔覆;每个分道划分为若干子段,子段扫描方向与分道的方向相反,构成逆向扫描路径。本发明用于均匀化工件温度场分布,降低激光熔覆加工过程中的残余应力、减少工件的变形,获得组织致密,力学性能优异的合金涂层。
30.如图1所示,本发明的一种基于瞬态温度场反馈的激光熔覆自适应扫描路径规划方法,包括以下步骤:
31.(1)将待加工工件表面划分若干块区,熔覆路径在块区单独规划,某一块区熔覆完成后再进行下一块区的熔覆;优选的,块区数目m为奇数;
32.(2)以块区内的瞬时平均温度(t1,t2,t3,
……
,t
r
,
……
,t
m
)作为确定各块区熔覆顺序的依据,在上一块区熔覆结束的时刻,瞬时平均温度最低的尚未熔覆块区确定为下一顺序进行熔覆的块区;其中,以处于或最邻近待加工工件表面几何中心的块区作为第一顺序的块区,首先进行熔覆;
33.(3)在块区内部,将熔覆路径分为若干分道,各分道相互搭接覆盖整个块区;优选的,分道数目n为偶数;
34.(4)以分道内的瞬时平均温度(t
k1
,t
k2
,t
k3
,
……
,t
rs
,
……
,t
kn
)作为确定各分道扫描次序的依据,在上一分道扫描结束的时刻,瞬时平均温度最低的尚未扫描的分道确定为下一次序进行扫描的分道;其中,以处于或最邻近区块几何中心的分道作为第一次序的分道,开始进行扫描。
35.(5)以瞬时温度低的端点至瞬时温度高的端点的方向作为分道的方向,其中,当两端点的瞬时温度相等时,分道的方向为任一端点到另一端点;将分道划分为若干子段,各子段的扫描次序按分道的方向依次确定,各子段内的扫描方向与其所在分道的方向相反。
36.本发明中,块区内的瞬时平均温度、分道内的瞬时平均温度、分道端点的瞬时温度由在线实时监测法或离线数值模拟法获得。
37.在线实时监测法采用红外热像仪等非接触测量手段,在激光熔覆过程中实时获取各时刻的瞬态温度分布,提取并计算对应时刻的块区内的瞬时平均温度、分道内的瞬时平均温度、分道端点的瞬时温度。
38.离线数值模拟法采用有限元温度场仿真等数值计算手段,在激光熔覆实施前计算各时刻的瞬态温度分布,提取对应时刻的块区内的瞬时平均温度、分道内的瞬时平均温度、分道端点的瞬时温度。
39.下面结合实施例对本发明做进一步说明。
40.实施例
41.如图2中(a)所示,待加工工件表面为平面矩形abcd,将其划分为9个彼此形状一致的块区,分别是aiep、ijfe、jbkf、fklg、glcm、hgmn、ohnd、peho、efgh。激光熔覆路径将分别在这9个块区内规划。在线实时监测法采用红外热像仪等非接触测量手段,各个区块的瞬时
平均温度由区块表面内各节点的瞬时温度的算术平均值确定,分别表示为t1、t2、t3、t4、t5、t6、t7、t8、t9。在上一区块熔覆结束时刻,比较未熔覆的各块区的瞬时平均温度,其中瞬时平均温度最低的作为下一次顺序熔覆的块区。特别地,在熔覆开始时刻,块区efgh处于待加工工件表面几何中心,作为第一顺序的熔覆块区。
42.在块区efgh内部,根据激光熔覆工艺参数、块区几何形状特点,如图2中(b)所示,将熔覆路径分为4个分道,分别表示为ab、cd、ef、gh。各分道以宽度方向搭接,从而覆盖整个区块。各个分道的瞬时平均温度由分道表面内各节点的瞬时温度的算术平均值确定,分别表示为t
91
、t
92
、t
93
、t
94
。在上一分道熔覆结束时刻,比较未熔覆的各分道的瞬时平均温度,其中瞬时平均温度最低的作为下一次序熔覆的分道。其中,分道cd和分道ef最邻近区块几何中心,选择其中的ef作为该块区的第一次序分道。以瞬时温度低的端点至瞬时温度高的端点的方向作为分道的方向。其中,在熔覆开始时刻,端点e和端点f瞬时温度相等,选择由端点e指向端点f作为分道方向,如图2中(c)所示。将分道ef划分为3个子段,如图2中(d)所示,各子段的扫描次序按分道的方向依次确定,各子段内的扫描方向与其所在分道的方向相反。当子段划分完毕后,开始按照子段次序进行熔覆,完成分道ef内扫描轨迹。在分道ef熔覆结束时刻,块区efgh内尚有ab、cd、gh三个分道未熔覆,对比此时刻的分道瞬时平均温度t
91
、t
92
、t
94
,其中t
91
最小,则确定分道ab作为下一次序进行熔覆的分道。对于分道ab的端点,此时刻端点a的瞬时温度低于端点b,确定分道方向为由端点a指向端点b,如图2中(e)所示。将分道ab划分为3个子段,如图2中(f)所示,各子段的扫描次序按分道的方向依次确定,各子段内的扫描方向与其所在分道的方向相反。当子段划分完毕后,开始按照子段次序进行熔覆,完成分道ab内扫描轨迹。按照此循环方式,块区efgh内下两个次序的分道分别是分道gh(图2中(g)所示)、分道cd(图2中(h)所示)。
43.完成块区efgh的熔覆后,尚有8个块区未熔覆,分别是aiep、ijfe、jbkf、fklg、glcm、hgmn、ohnd、peho。对比块区efgh的熔覆结束时刻的此8个块区的瞬时平均温度t1、t2、t3、t4、t5、t6、t7、t8,其中t3最低,选择块区jbkf作为第二顺序熔覆的块区。然后按照上述方法对块区jbkf完成划分分道、选择分道次序、确定分道方向、划分子段、确定子段的熔覆次序和方向的循环操作,以完成块区jbkf的熔覆。然后以相同的方式确定剩余块区的熔覆顺序,完成剩余块区的熔覆。
44.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。