技术特征:
1.一种机臂组件,用于多旋翼无人飞行器,其特征在于,包括:机臂、机臂支架和限位件;所述机臂与所述机臂支架可活动连接,并能够处于折叠状态和展开状态;所述限位件与所述机臂支架可活动连接,所述限位件具有第一接触面和第二接触面;其中,在所述机臂自所述折叠状态至所述展开状态运动的过程中,所述机臂能够与所述第一接触面接触以推开所述限位件,所述限位件能够在被所述机臂推开后返回,以使所述机臂处于展开状态时能够被限位于所述机臂支架与所述限位件之间;当所述机臂处于展开状态时,所述限位件通过所述第二接触面抵接所述机臂以止挡所述机臂朝所述折叠状态的方向运动。2.根据权利要求1所述的机臂组件,其特征在于,所述机臂支架设置有转轴,所述机臂能够围绕所述转轴转动,以自所述折叠状态至所述展开状态运动。3.根据权利要求2所述的机臂组件,其特征在于,所述第二接触面为相对于所述转轴的轴线方向倾斜的倾斜面。4.根据权利要求3所述的机臂组件,其特征在于,所述第二接触面与所述机臂之间的摩擦系数μ,与所述第二接触面相对于所述轴线方向的倾角α,满足μ≥tanα。5.根据权利要求3所述的机臂组件,其特征在于,所述第一接触面为相对于所述转轴的轴线方向倾斜的倾斜面;所述第一接触面相对于所述轴线方向的倾角β大于所述第二接触面相对于所述轴线方向的倾角α。6.根据权利要求1至5中任一项所述的机臂组件,其特征在于,当所述机臂处于展开状态时,所述限位件通过所述第二接触面抵接所述机臂的侧壁。7.根据权利要求2所述的机臂组件,其特征在于,所述限位件靠近所述机臂的一端的厚度小于所述限位件远离所述机臂的一端的厚度。8.根据权利要求3所述的机臂组件,其特征在于,所述第一接触面与所述第二接触面为所述限位件上相背的两侧面。9.根据权利要求8所述的机臂组件,其特征在于,所述第一接触面为相对于所述转轴的轴线方向倾斜的倾斜面且所述第一接触面和所述第二接触面的倾斜方向相反;或所述第一接触面为弧面。10.根据权利要求1所述机臂组件,其特征在于,所述第二接触面为平面;所述第二接触面位于所述限位件在所述机臂支架上的活动方向上的一端。11.根据权利要求1至10中任一项所述的机臂组件,其特征在于,所述限位件与所述机臂支架可滑动连接。12.根据权利要求11所述的机臂组件,其特征在于,所述机臂组件还包括:弹性件,连接所述机臂支架和所述限位件,以对所述限位件施加弹力,使得所述限位件在所述弹性件的弹力作用力下能够自动复位与所述机臂抵接。
13.根据权利要求12所述的机臂组件,其特征在于,所述弹性件对所述限位件施加的弹力大于或等于所述限位件与所述机臂支架之间的摩擦力。14.根据权利要求1所述的机臂组件,其特征在于,所述机臂支架设置有锁定部,所述限位件设置有被锁定部;所述被锁定部能够与所述锁定部相配合,以使所述机臂处于展开状态时,所述第二接触面能够保持与所述机臂的抵接状态。15.根据权利要求11所述的机臂组件,其特征在于,当所述机臂处于展开状态时,所述限位件能够在自身重力作用下保持所述第二接触面与所述机臂的抵接状态。16.根据权利要求11所述的机臂组件,其特征在于,当所述机臂自所述折叠状态至所述展开状态运动的过程中,所述限位件通过所述第一接触面与所述机臂接触并被所述机臂推开,从而相对所述机臂支架滑动;当所述机臂推开所述限位件并脱离所述限位件后,所述限位件能够返回至原位,以使得所述机臂处于展开状态时,所述限位件通过所述第二接触面抵接所述机臂。17.根据权利要求11所述的机臂组件,其特征在于,所述机臂支架和所述限位件中一个设置有导向槽,另一个设置有导向凸起;在所述限位件相对于所述机臂支架滑动的过程中,所述导向凸起在所述导向槽内移动。18.根据权利要求11所述的机臂组件,其特征在于,所述机臂组件还包括:提手,与所述限位件连接,用于在外力作用下带动所述限位件远离所述机臂。19.根据权利要求11所述的机臂组件,其特征在于,所述机臂支架设置有容纳腔,所述机臂的第一端伸入所述容纳腔,并与所述容纳腔的腔壁可转动连接;所述机臂支架还设置有安装腔,与所述容纳腔连通,所述限位件至少部分位于所述安装腔内,所述限位件能够在进入和远离所述容纳腔的方向滑动。20.根据权利要求19所述的机臂组件,其特征在于,所述机臂支架包括第一壁、第二壁和第三壁,所述第一壁与所述第二壁相对间隔分布,所述第三壁连接所述第一壁和所述第二壁,并与所述第一壁和所述第二壁围合形成所述容纳腔。21.根据权利要求20所述的机臂组件,其特征在于,所述第一壁和/或所述第二壁上设有轴孔;所述机臂支架设置有转轴,所述转轴穿过所述轴孔伸入所述机臂的所述第一端中,所述机臂能够围绕所述转轴转动以展开或折叠。22.根据权利要求20所述的机臂组件,其特征在于,当所述机臂处于展开状态时,所述机臂的第一端位于所述限位件与所述第三壁之间。23.一种无人飞行器,其特征在于,包括:中心体;和机臂组件,所述机臂组件包括机臂、机臂支架和限位件,所述机臂支架将所述机臂安装于所述中心体;
所述机臂与所述机臂支架可活动连接,并能够处于折叠状态和展开状态;所述限位件与所述机臂支架可活动连接,所述限位件具有第一接触面和第二接触面;其中,在所述机臂自所述折叠状态至所述展开状态运动的过程中,所述机臂能够与所述第一接触面接触以推开所述限位件,所述限位件能够在被所述机臂推开后返回,以使所述机臂处于展开状态时能够被限位于所述机臂支架与所述限位件之间;当所述机臂处于展开状态时,所述限位件通过所述第二接触面抵接所述机臂以止挡所述机臂朝所述折叠状态的方向运动;多个旋翼装置,分别安装在多个所述机臂,每个所述旋翼装置包括电机、以及安装在所述电机上的螺旋桨,所述电机驱动所述螺旋桨转动,为所述无人飞行器提供飞行动力。24.根据权利要求23所述的无人飞行器,其特征在于,所述机臂支架设置有转轴,所述机臂能够围绕所述转轴转动,以自所述折叠状态至所述展开状态运动。25.根据权利要求24所述的无人飞行器,其特征在于,所述第二接触面为相对于所述转轴的轴线方向倾斜的倾斜面。26.根据权利要求25所述的无人飞行器,其特征在于,所述第二接触面与所述机臂之间的摩擦系数μ,与所述第二接触面相对于所述轴线方向的倾角α,满足μ≥tanα。27.根据权利要求25所述的无人飞行器,其特征在于,所述第一接触面为相对于所述转轴的轴线方向倾斜的倾斜面;所述第一接触面相对于所述轴线方向的倾角β大于所述第二接触面相对于所述轴线方向的倾角α。28.根据权利要求23至27中任一项所述的无人飞行器,其特征在于,当所述机臂处于展开状态时,所述限位件通过所述第二接触面抵接所述机臂的侧壁。29.根据权利要求24所述的无人飞行器,其特征在于,所述限位件靠近所述机臂的一端的厚度小于所述限位件远离所述机臂的一端的厚度。30.根据权利要求25所述的无人飞行器,其特征在于,所述第一接触面与所述第二接触面为所述限位件上相背的两侧面。31.根据权利要求30所述的无人飞行器,其特征在于,所述第一接触面为相对于所述转轴的轴线方向倾斜的倾斜面且所述第一接触面和所述第二接触面的倾斜方向相反;或所述第一接触面为弧面。32.根据权利要求23所述的无人飞行器,其特征在于,所述第二接触面为平面;所述第二接触面位于所述限位件在所述机臂支架上的活动方向上的一端。33.根据权利要求23至32中任一项所述的无人飞行器,其特征在于,所述限位件与所述机臂支架可滑动连接。34.根据权利要求33所述的无人飞行器,其特征在于,所述机臂组件还包括:弹性件,连接所述机臂支架和所述限位件,以对所述限位件施加弹力,使得所述限位件在所述弹性件的弹力作用力下能够自动复位与所述机臂抵接。
35.根据权利要求34所述的无人飞行器,其特征在于,所述弹性件对所述限位件施加的弹力大于或等于所述限位件与所述机臂支架之间的摩擦力。36.根据权利要求23所述的无人飞行器,其特征在于,所述机臂支架设置有锁定部,所述限位件设置有被锁定部;所述被锁定部能够与所述锁定部相配合,以使所述机臂处于展开状态时,所述第二接触面能够保持与所述机臂的抵接状态。37.根据权利要求33所述的无人飞行器,其特征在于,当所述机臂处于展开状态时,所述限位件能够在自身重力作用下保持所述第二接触面与所述机臂的抵接状态。38.根据权利要求33所述的无人飞行器,其特征在于,当所述机臂自所述折叠状态至所述展开状态运动的过程中,所述限位件通过所述第一接触面与所述机臂接触并被所述机臂推开,从而相对所述机臂支架滑动;当所述机臂推开所述限位件并脱离所述限位件后,所述限位件能够返回至原位,以使得所述机臂处于展开状态时,所述限位件通过所述第二接触面抵接所述机臂。39.根据权利要求33所述的无人飞行器,其特征在于,所述机臂支架和所述限位件中一个设置有导向槽,另一个设置有导向凸起;在所述限位件相对于所述机臂支架滑动的过程中,所述导向凸起在所述导向槽内移动。40.根据权利要求33所述的无人飞行器,其特征在于,所述机臂组件还包括:提手,与所述限位件连接,用于在外力作用下带动所述限位件远离所述机臂。41.根据权利要求33所述的无人飞行器,其特征在于,所述机臂支架设置有容纳腔,所述机臂的第一端伸入所述容纳腔,并与所述容纳腔的腔壁可转动连接;所述机臂支架还设置有安装腔,与所述容纳腔连通,所述限位件至少部分位于所述安装腔内,所述限位件能够在进入和远离所述容纳腔的方向滑动。42.根据权利要求41所述的无人飞行器,其特征在于,所述机臂支架包括第一壁、第二壁和第三壁,所述第一壁与所述第二壁相对间隔分布,所述第三壁连接所述第一壁和所述第二壁,并与所述第一壁和所述第二壁围合形成所述容纳腔。43.根据权利要求42所述的无人飞行器,其特征在于,所述第一壁和/或所述第二壁上设有轴孔;所述机臂支架设置有转轴,所述转轴穿过所述轴孔伸入所述机臂的所述第一端中,所述机臂能够围绕所述转轴转动以展开或折叠。44.根据权利要求42所述的无人飞行器,其特征在于,当所述机臂处于展开状态时,所述机臂的第一端位于所述限位件与所述第三壁之间。
技术总结
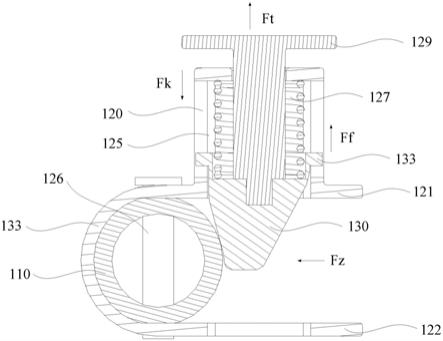
一种机臂组件和无人飞行器。其中,机臂组件用于多旋翼无人飞行器,机臂组件(100)包括:机臂(110)、机臂支架(120)和限位件(130);机臂(110)与机臂支架(120)可活动连接,并能够处于折叠状态和展开状态;限位件(130)与机臂支架(120)可活动连接,限位件(130)具有第一接触面(131)和第二接触面(132);其中,在机臂(110)自折叠状态至展开状态运动的过程中,机臂(110)能够与第一接触面(131)接触以推开限位件(130),限位件(130)能够在被机臂(110)推开后返回,以使机臂110处于展开状态时能够被限位于机臂支架120与限位件130之间;当机臂(110)处于展开状态时,限位件(130)通过第二接触面(132)抵接机臂(110)以止挡机臂(110)朝折叠状态的方向运动。该机臂组件(100),通过第二接触面132与机臂110进行抵接的方式实现机臂110的锁紧,结构简单,操作方便,可靠性高。可靠性高。可靠性高。
技术研发人员:舒展 黄彦鑫 农贵升
受保护的技术使用者:深圳市大疆创新科技有限公司
技术研发日:2020.06.01
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。