1.本发明涉及全球定位系统与三维激光跟踪测量技术领域,具体涉及一种全天候垂线偏差时变测量方法。
背景技术:
2.地面一点上的铅垂线方向与参考方向(椭球面法线)之间的夹角为该点的垂线偏差,通常用子午圈分量(南北方向的分量)和卯酉圈分量(东西方向的分量)表示。垂线偏差表示了大地水准面相对于参考椭球面的倾斜程度,表征了地球内部质量分布的时空不均匀性。垂线偏差给出了重力矢量的方向,是大地测量学和地球物理学等基础学科领域的基本物理量,含有丰富的地球重力场高频信息,它可以很好地反映重力场的精细信息,在解决大地测量应用、地球物理反演等领域有着非常重要的应用。
3.地球的运动往往会伴随着物质迁移,从而引起质量、密度的重新分布。这种重新分布必然导致重力场在时间域里发生变化,作为表征重力方向的铅垂线是能够比较敏感地反映这种变化的,而在垂线偏差定义中的参考方向(椭球面法线)是不随时间改变的,这时的垂线偏差就会随着时间变化而变化,称之为垂线偏差时变,实际上就是铅垂线随时间的变化。
4.垂线偏差的短期时变是研究地壳运动、地震预报、火山爆发、地下水位变化等许多地学领域必要的基础数据,长期时变也在解决板块运动、地幔对流、地球自转速度等领域有着非常重要的应用。总之,垂线偏差变化量中包含着的非常丰富的地球内部物理状态信息,在地球动力学研究中发挥着重要的作用。
5.目前对于垂线偏差时变的测量主要是基于垂线偏差的测量,这些传统垂线偏差测量技术存在难度大、耗时多、费用代价高等问题,易受环境条件限制,无法进行全天候的观测,严重地限制了垂线偏差时变数据的获取和广泛应用。
技术实现要素:
6.本发明的目的在于提出一种全天候垂线偏差时变测量方法,以便能够全天候快速高效地获得垂线偏差时变。
7.一种全天候垂线偏差时变测量方法,包括:
8.s1.在密闭空间内选择悬挂点、悬挂顶点和基准点,安置悬挂靶球、悬挂顶点靶球和基准靶球,利用纤维线将悬挂靶球与悬挂顶点靶球连接,使悬挂靶球悬浮在空中;
9.所述密闭空间的气压、温度和湿度稳定,不受自然因素的影响;
10.s2.利用激光跟踪仪和gnss接收机获得悬挂顶点和基准点的大地坐标;
11.s3.在所述密闭空间内的开阔地选择测点j,在j点架设激光跟踪仪,并进行仪器整平;
12.s4.利用激光跟踪仪对密闭空间内的悬挂靶球、悬挂顶点靶球和基准靶球进行测量,获得独立坐标系下悬顶点、悬挂顶点和基准点的三维坐标;
13.s5.根据步骤中s2获得的悬挂顶点和基准点的大地坐标,求得独立坐标系与大地坐标系之间的转换参数,并将独立坐标系下悬挂点坐标转换到大地坐标系下获得其大地坐标;
14.s6.通过定期或不定期观测,重复步骤s3至步骤s5,获得不同时刻悬挂顶点和悬挂点的大地坐标,计算垂线偏差的时变特征;
15.所述计算垂线偏差的时变特征包括:
16.设i=0时刻,悬挂顶点p的大地坐标为悬挂点q的大地坐标为
17.利用公式(1)和公式(2)将悬挂顶点p点的大地坐标转为空间直角坐标同理可得q点的空间直角坐标
[0018][0019]
公式(1)中,e为椭球偏心率,n为基准椭球体的曲率半径,公式(2)中,a为椭球的长半轴,b为椭球的短半轴;
[0020]
固体潮、海潮、极潮会对gnss测量的大地坐标产生影响,计算垂线偏差的时变特征时应考虑其的影响,设i=1时刻,公式(3)可得悬挂顶点p的大地坐标为时应考虑其的影响,设i=1时刻,公式(3)可得悬挂顶点p的大地坐标为
[0021]
公式(3)中,和分别为三个方向上的由固体潮、海潮、极潮引起的时变改正;
[0022]
i=1时刻,对基准点大地坐标也进行固体潮、海潮、极潮引起的时变改正,设i=1时刻,利用步骤s2至步骤s4获得经固体潮、海潮、极潮时变改正后的悬挂点q的大地坐标为
[0023]
利用公式(1)和公式(2)求得i=1时刻悬挂顶点p和悬挂点q的空间直角坐标和则悬挂点q相对于悬挂顶点p在i=0和1时刻的变化分别表示为:
[0024][0025]
利用公式(5)求得i=0到i=1时刻,悬挂点q点在以p点为坐标原点的neu坐标系中的时变特征
[0026][0027]
即
[0028]
利用公式(6)获得垂线偏差子午和卯酉方向的时变特征:
[0029][0030]
公式(6)中,r为悬挂顶点到悬挂点之间的距离,δξ为垂线偏差子午方向的时变特征,δη为垂线偏差卯酉方向的时变特征。
[0031]
优选地,步骤s1中,悬挂顶点靶球固定于密闭空间内的顶部,悬挂靶球与悬挂顶点靶球之间的连线长度不少于2m。
[0032]
优选地,步骤s1中,基准靶球有多个,各个基准靶球均匀分布在密闭空间内且以悬挂靶球为中心呈正多边形分布。
[0033]
优选地,步骤s1中,连接悬挂靶球的纤维线强度高、重量轻、耐热性好、热膨胀系数小。
[0034]
优选地,步骤s2中,利用激光跟踪仪和gnss接收机获得的悬挂顶点和基准点的大地坐标应每隔3个月进行复测检核。
[0035]
相比于现有(天文大地测量、重力测量等)的测量技术,本发明可以高效快速地确定垂线偏差的时变特征,本发明具有测量操作简便、效率高、工作量小、测量结果可靠、测量精度高、受气象条件影响小以及可全天候作业等优势。
附图说明
[0036]
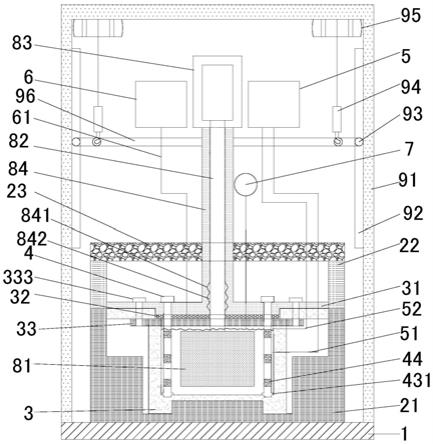
图1为本发明中垂线偏差时变测量示意图。
[0037]
图2为本发明中垂线偏差时变测量方法流程示意图。
[0038]
图3为本发明中坐标系转系换示意图。
[0039]
图4为利用本发明方法后的垂线偏差子午方向时变精度示意图。
[0040]
图5为利用本发明方法后的垂线偏差卯酉方向时变精度示意图。
[0041]
附图标记包括:1
‑
激光跟踪仪,2
‑
悬挂顶点靶球,3
‑
悬挂靶球,4
‑
基准靶球。
具体实施方式
[0042]
下面结合具体实施方式对本发明作进一步详细说明:
[0043]
本发明公开一种全天候垂线偏差时变测量方法,具体是激光跟踪技术与gnss技术的融合。
[0044]
垂线偏差时变测量的示意图如图1所示,包括激光跟踪仪1,悬挂顶点靶球2,悬挂靶球3,基准靶球4。其中:
[0045]
激光跟踪仪1安置于相对密闭空间内的开阔地带,负责测量各个靶球在独立坐标系下的坐标。
[0046]
悬挂顶点靶球2固定于相对密闭空间内的顶部,与悬挂靶球3用纤维线链接,悬挂靶球3悬浮在空中,悬挂靶球3与悬挂顶点靶球2之间的连线不少于2m,且密闭空间的气压、温度、湿度相对稳定,并且不受风等自然因素的影响。
[0047]
基准靶球4有多个,在图1中示出了四个基准靶球。各个基准靶球4均匀分布在密闭空间中,大致以悬挂靶球3为中心,呈正多边形分布。
[0048]
独立坐标系是以激光跟踪仪1的镜头中心为原点建立的xyz三维直角坐标系。
[0049]
如图2所示,该全天候垂线偏差时变测量方法包括如下步骤:
[0050]
s1.在相对密闭的空间内选择合适的悬挂顶点、基准点,并安置靶球,密闭空间的气压、温度、湿度相对稳定,并且不受风等自然因素的影响。利用纤维线将悬挂靶球与悬挂顶点靶球链接,使之悬浮在空中;
[0051]
s2.利用激光跟踪仪和gnss接收机,获得悬挂顶点和基准点的大地坐标;
[0052]
s3.在相对密闭空间内开阔的地选择测点j,在j点架设激光跟踪仪,并进行仪器整平;
[0053]
s4.利用激光跟踪仪对空间内的悬挂顶点靶球、悬挂靶球和基准靶球进行测量,获得独立坐标系下悬挂顶点、悬挂点和基准点的三维坐标;
[0054]
s5.根据s2.步骤中获得的悬挂顶点和基准点的大地坐标,求得独立坐标系与大地坐标系之间的转换参数,并将独立坐标系下悬挂点转换到大地坐标系下,获得其大地坐标;
[0055]
本步骤中,需要将独立坐标系下的悬挂顶点和悬挂点转换到大地坐标系下,涉及大旋转角的空间直角坐标转换,7参数线性模型已不适用。因此,在本步骤中,采用以方向余弦为参数的坐标转换方法,实现独立坐标系与大地坐标系之间的转换。
[0056]
该坐标转换的详细介绍如下所示:
[0057]
设某公共点a在独立坐标系o
‑
xyz中的坐标为(x,y,z),在空间直角坐标(大地坐标)系o
‑
xyz中的坐标为(x,y,z),则o
‑
xyz与o
‑
xyz的关系如图3所示。
[0058]
令x轴在o
‑
xyz中的方向余弦为(a1,b1,c1),y轴在o
‑
xyz中的方向余弦为(a2,b2,c2),z轴在o
‑
xyz中的方向余弦为(a3,b3,c3);则x轴在o
‑
xyz中的方向余弦为(a1,a2,a3),y轴在o
‑
xyz中的方向余弦为(b1,b2,b3),z轴在o
‑
xyz中的方向余弦为(c1,c2,c3)。
[0059]
定义ψ为尺度比,(δx,δy,δz)为o
‑
xyz的原点相对于o
‑
xyz原点的平移量。
[0060]
设两坐标系的公共点个数为n,用矩阵表示为:
[0061][0062]
将旋转矩阵用r表示:
[0063][0064]
则公式(1)转换为:
[0065][0066]
由于r为正交矩阵,相应的坐标变换为正交变换,则必然存在下列条件:
[0067][0068]
因为r阵中仅有3个独立参数,其余6个参数可根据上面条件推导求得。
[0069]
所以取a2,a3,b3为独立参数,则其余6个参数为:
[0070][0071]
若有3个以上的公共点,根据公式(1),利用最小二乘法即可求得3个平移参数、三个旋转参数、1个尺度参数。但由于公式(1)中r阵仅有3个独立参数,其余6个参数都是其非线性函数,所以直接解算公式(1)是非常复杂的。
[0072]
因此,设未知数为3个平移参数、1个尺度参数、9个方向余弦参数,将公式(1)用泰勒级数一阶展开,可得:
[0073]
[0074]
公式(6)中,上标为0的代数为近似值,dδx、dδy、dδz、dψ、da1、da2、da3、db1、db2、db3、dc1、dc2、dc3为改正数,将公式(6)写成误差方程形式如下:
[0075]
v
i
=b
i
x
‑
l
i
,i=1,2,k,n
ꢀꢀ
(7)
[0076]
其中,分别表示各个公共点x、y、z方向的坐标改正值;
[0077][0078]
x=[dδx dδy dδz dψ da
1 da
2 da
3 db
1 db
2 db
3 dc
1 dc
2 dc3]
t
;
[0079][0080]
但由于a1、a2、a3、b1、b2、b3、c1、c2、c3相关,根据公式(4)列出条件方程:
[0081]
cx w=0
ꢀꢀ
(8)
[0082]
其中,x的含义同上,c和w分别为:
[0083][0084][0085]
按附有条件的间接平差法解算公式(7)、(8),就可以得到:
[0086][0087]
其中:n
bb
=b
t
pb,w
l
=b
t
pl,p为权阵。
[0088]
在大地测量和工程测量中,ψ一般接近于1,因此,公式(7)中其余未知数的关系是线性的,可看作准线性模型。对于线性模型,在平差时,对近似值的选取要求非常宽松,可以粗略的选取近似值。应用此方法进行空间直角坐标转换,可按以下步骤实现。
[0089]
①
近似值的确定,一般情况下,可取:
[0090][0091]
②
按公式(7)组成误差方程,若有n个点,则可组成3n个误差方程;
[0092]
③
按式(8)组成条件方程,可组成6个条件方程;
[0093]
④
由3n 6个方程,解13个未知数的改正值;
[0094]
⑤
计算未知数的最新值;
[0095]
⑥
根据改正值的大小判断是否满足收敛要求:
[0096]
若不满足,重复步骤
②
~步骤
⑥
,直到满足收敛要求;
[0097]
s6.通过定期或不定期观测,重复s3.
‑
s5.步骤,获得不同时刻悬挂顶点、悬挂点的大地坐标,计算垂线偏差的时变特征。具体过程如下:
[0098]
设i=0时刻,悬挂顶点p的大地坐标为悬挂点q的大地坐标为
[0099]
利用公式(11
‑
12)将悬挂顶点p点的大地坐标转为空间直角坐标同理可得q点的空间直角坐标
[0100][0101]
其中,e为椭球偏心率,n为基准椭球体的曲率半径,分别表示为:
[0102][0103]
其中,a为椭球的长半轴,b为椭球的短半轴;
[0104]
由于固体潮、海潮、极潮会对gnss测量的大地坐标产生影响,因此在计算垂线偏差的时变特征时应考虑其的影响。设i=1时刻,悬挂顶点p的大地坐标为由公式(13)计算得到;
[0105][0106]
其中,和分别为三个方向上的由固体潮、海潮、极潮引起的时变改正。
[0107]
同理,i=1时刻,对基准点大地坐标也进行固体潮、海潮、极潮引起的时变改正;
[0108]
设i=1时刻,利用s2.
‑
s4.步骤获得经固体潮、海潮、极潮时变改正后的悬挂点q的大地坐标为
[0109]
同理,利用公式(11
‑
12)求得i=1时刻悬挂顶点p和悬挂点q的空间直角坐标和则悬挂点q相对于悬挂顶点p在i=0和1时刻的变化分别表示为:
[0110][0111]
利用公式(15)求得i=0到1时刻,悬挂点q点在以p点为坐标原点的neu坐标系中的时变特征(δn
01
,δe
01
,δu
01
);
[0112][0113]
即
[0114]
利用公式(16)获得垂线偏差子午和卯酉方向的时变特征(
″
);
[0115][0116]
其中,r为悬挂顶点到悬挂点之间的距离,δξ为垂线偏差子午方向的时变特征,δη为垂线偏差卯酉方向的时变特征;
[0117]
所述步骤s1.中,悬挂靶球与悬挂顶点靶球之间的连线不少于2m;
[0118]
所述步骤s1.中,链接悬挂靶球的纤维线应具有强度高、重量轻、耐热性好、热膨胀系数小等特点,例如凯夫拉纤维线、碳纤维线等。
[0119]
所述步骤s2.中,利用激光跟踪仪和gnss接收机获得悬挂顶点和基准点的大地坐标由下述方式进行测量与复测:
[0120]
1.在相对密闭空间与室外连接处较为开阔的地带选择测点k,在k点架设激光跟踪仪,并进行仪器整平;
[0121]
2.利用激光跟踪仪对围绕测点k架设的gnss接收机进行观测,获得独立坐标系下gnss接收机的三维坐标,根据各个gnss接收机测量得到测点处的大地坐标,求得独立坐标系与大地坐标系之间的转换参数;
[0122]
3.利用激光跟踪仪对相对密闭空间内的悬挂顶点靶球和基准点靶球进行测量,获
得独立坐标系下悬挂顶点和基准点的三维坐标;
[0123]
4.根据已求得的独立坐标系与大地坐标系之间的转换参数,将独立坐标系下的悬挂顶点和基准点转换到大地坐标系下,即可获得悬挂顶点和基准点大地坐标;
[0124]
5.每隔3个月应重复1
‑
4流程对悬挂顶点和基准点进行复测检核。
[0125]
所述步骤s5.中,由固体潮、海潮、极潮引起的大地坐标时变改正如下所述:
[0126]
1.固体潮是指在日、月等天体引力作用下,固体地球产生周期性变化的现象。在精密数据处理中必须加以改正,一般只考虑二阶和三阶固体潮的影响。二阶固体潮影响的改正公式:
[0127][0128]
三阶固体潮影响的改正公式:
[0129][0130]
其中,gm
j
是万有引力常数(月亮j=2,太阳j=3),gm
θ
是地球的万有引力常数,r
j
和r
j
分别是地心到月球/太阳距离的单位向量和模,r
e
是地球的赤道半径,r和r分别是地心到测站距离的单位向量和模,h2和l2分别是二阶love数和shida数的标称值。
[0131]
2.海潮引起海水质量的重新分布,从而导致地壳所承受的荷载,在实际应用中,海潮位移改正由11个分潮波的影响叠加而成,即表示为:
[0132][0133]
其中,δc为某一时刻t测站在径向、东西和南北向的海潮负荷位移改正;j(1≤j≤11)为11个主要海潮分潮,包括4个半日分潮m2、s2、n2、k2,4个全日分潮k1、o1、p1、q1,3个长周期潮m
f
、m
m
、s
sa
,其余潮波可以通过插值获取;f
j
和u
j
分别为分潮波j的交点因子和订正角,与月球轨道升交点的经度有关;a
cj
和φ
cj
分别为分潮波j在测站相应方向的振幅和相位,可由海潮模型求得;ω
j
和χ
j
分别为分潮波j的角频率和天文幅角初相。
[0134]
3.受极潮的影响,地球上每一点的离心力位会发生变化,并导致地球发生形变,因此在精密数据处理中应考虑极移的影响。极潮位移改正计算方法如公式(20)所示:
[0135][0136]
其中,(λ,θ)为测站的经纬度;s
r
、s
λ
分别为测站径向、南北、东西向的极潮位移改正;x
p
和y
p
是瞬时的极移值,和是平均自转轴位置。
[0137]
下面对利用本发明方法所能达到的精度进行说明:
[0138]
利用本发明方法进行垂线偏差时变测量过程中,存在的误差有激光跟踪仪测量误差,独立坐标系与大地坐标系之间的坐标转换误差。由于本发明中采用迭代的坐标转换算法,因此造成的误差对结果影响很小,可忽略不计。因此激光跟踪仪1的测量误差即为本发
明的主要误差。
[0139]
假设利用激光跟踪仪对悬挂顶点靶球2、悬挂靶球3和基准靶球4进行观测,每个坐标观测数据加入均值为0,标准差为10μm的随机误差,每30次观测取平均记为1次观测值。
[0140]
按照上文中介绍的垂线偏差时变计算方法和坐标转换方法,得到两次测量间的悬挂点坐标时变(δn,δe,δu),进而得到垂线偏差时变特征(δξ,δη)。
[0141]
计算两次测量间的垂线偏差时变测量的精度。
[0142]
仿真重复以上实验1000次,其结果如图5所示,统计结果见表1。
[0143]
表1各参数偏差统计(单位/
″
)
[0144] δξ偏差δη偏差max0.911.17min
‑
0.94
‑
0.86mean
‑
0.010.02std0.290.28
[0145]
通过图4
‑
图5和表1可以发现,本发明得到的垂线偏差子午和卯酉方向的时变标准差分别为0.29
″
和0.28
″
。因此,相比于传统(天文大地测量、重力测量等)的测量方法,本发明在垂线偏差时变测量精度方面有着明显提高。此外,本发明还具有测量操作简便、效率高、工作量小、受气象条件影响小以及可全天候作业等优势。
[0146]
当然,以上说明仅仅为本发明的较佳实施例,本发明并不限于列举上述实施例,应当说明的是,任何熟悉本领域的技术人员在本说明书的教导下,所做出的所有等同替代、明显变形形式,均落在本说明书的实质范围之内,理应受到本发明的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。