1.本发明涉及的是航空技术领域,具体地说是一种地面解决飞机平衡速度异常的方法。
背景技术:
2.随着航空技术的发展,飞机作为一种装备和交通工具等广泛出现在生活中。在飞机出厂试飞时,处理飞机平衡速度异常问题的传统方法,是地勤维护人员依据飞行员关于平衡速度异常的具体评述,在地面是按经验对飞机平飞操纵系统参数进行调整,然后再进行试飞,如果不行,再调整再试飞的方式来解决。传统方法只能通过多次调整多次试飞的方法,解决平衡速度异常问题,因飞行成本高昂,使用传统方法处理,飞机平衡速度异常问题使得飞机出厂试飞成本较高。
3.因此,在处理飞机平衡速度异常问题时,希望通过一种新的方法来减少试飞架次数,降低飞机出厂试飞成本。
技术实现要素:
4.本发明要解决的技术问题是针对背景技术中存在的问题,提供一种解决平衡速度异常方法,利用该方法可以减少试飞架次数,降低飞机出厂试飞成本,具体地说是一种地面解决飞机平衡速度异常的方法。
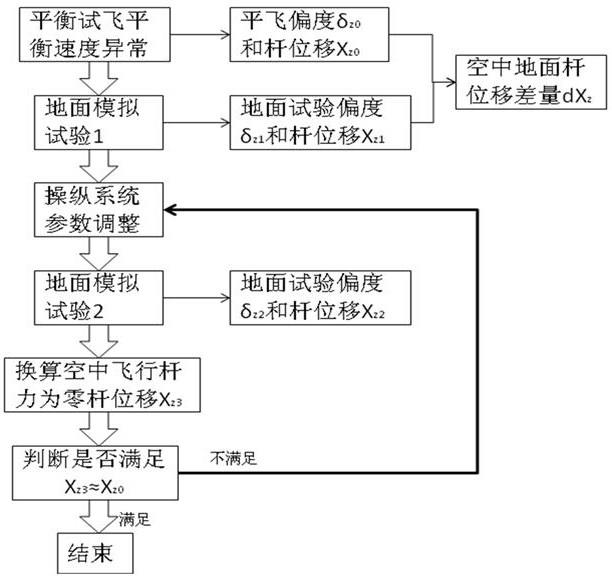
5.为解决上述技术问题,本发明所采用的技术方案为:一种地面解决飞机平衡速度异常的方法,所述方法包括以下步骤:步骤1: 查询到平衡速度异常的飞机平衡速度试飞飞行飞参中,设计平衡速度飞机平飞所需的平飞偏度δz0和对应的纵向驾驶杆位移xz0;步骤2:将平衡速度异常的飞机不做任何调整,直接进行地面抽动静压模拟试验,即进行地面模拟试验1,得到飞参平飞偏度δz1和对应的纵向驾驶杆位移xz1,此时杆位移xz1所对应的杆力为零;步骤3:根据步骤1和步骤2结果,计算出设计平衡速度空中飞行和地面模拟飞参相同平飞偏度时,纵向驾驶杆位移差量dxz= xz0
‑
δz0/(δz1/xz1);步骤4:根据步骤3计算的纵向驾驶杆位移差量,按技术条件,通过操纵系统进行参数调整;步骤5:再次进行地面动静压模拟试验,其试验条件同步骤2,即进行地面模拟试验2,得到地面试验飞参平飞偏度δz2和对应的纵向驾驶杆位移xz2,此时杆位移xz2所对应的杆力为零;步骤6:换算空中飞行杆力为零时杆位移xz3=δz0/(δz2/xz2) dxz,若xz3≈xz0,则飞机空中飞行平衡速度条件满足;否则,不满足要求,则重复步骤4~步骤6。
6.进一步地,本发明所述的一种地面解决飞机平衡速度异常的方法,其中在所述步骤2中,所述地面抽动静压模拟试验的具体操作方法是,驾驶杆在无人操纵情况下,将操纵
系统中的力臂调节器切换至自动状态,直接进行地面抽动静压模拟试验,模拟气压高度3000m时的设计平衡速度,测量变臂偏度,并查询到对应表速的地面试验飞参平飞偏度δz1和对应的纵向驾驶杆位移xz1,此时杆位移xz1对应杆力为零。
7.进一步地,本发明所述的一种地面解决飞机平衡速度异常的方法,其中在所述步骤4中,所述参数调整是指对操纵系统中的拉杆一、拉杆二、拉杆三和拉杆四按技术条件进行长度调整,通过调节力臂调节器的倾斜方向,即可对拉杆一、拉杆二、拉杆三和拉杆四的长度进行调整,使其符合纵向驾驶杆位移差量。
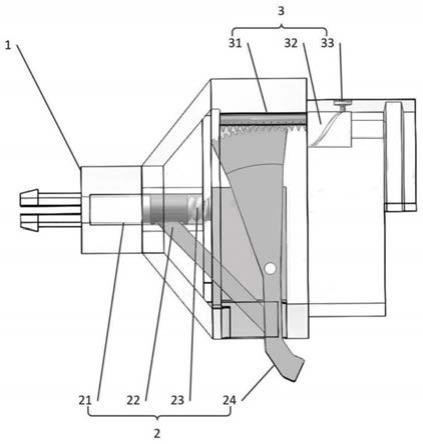
8.进一步地,本发明所述的一种地面解决飞机平衡速度异常的方法,其中所述操纵系统包括力臂调节器、载荷机构、调效机构、拉杆一、拉杆二、拉杆三、拉杆四和摇臂,所述摇臂设有三个,分别为摇臂一、摇臂二和摇臂三,所述拉杆一的一端与摇臂一连接,另一端与力臂调节器连接,所述载荷机构和调效机构之间通过摇臂二连接,所述载荷机构的另一端通过拉杆二与力臂调节器连接,所述拉杆三和拉杆四之间通过摇臂三连接,所述拉杆三的另一端与力臂调节器连接,在所述摇臂的作用下,通过所述力臂调节器可以分别对拉杆一、拉杆二、拉杆三和拉杆四的长度进行调整。
9.采用本发明所述的一种地面解决飞机平衡速度异常的方法,与现有技术相比,其有益效果在于:针对飞机平衡试飞平衡速度异常,利用地面抽动静压模拟试验数据和平衡速度异常时平飞飞参数数据,采用换算空中飞行杆力为零杆位移的方法,能够比较准确地利用地面模拟试验数据调整飞机平衡速度操纵系统参数,并且所需平衡试飞架次数少,能够比较准确地利用地面模拟试验数据调整飞机平衡速度操纵系统参数。其通用性强,安全实用,适合推广使用。
附图说明
10.下面结合附图对本发明作进一步详细说明。
11.图1为本发明的结构原理模拟流程图;图2为本发明所述操纵系统中拉杆连接状态结构示意图。
12.图中所示:1
‑
力臂调节器、2
‑
载荷机构、3
‑
调效机构、4
‑
拉杆一、5
‑
拉杆二、6
‑
拉杆三、7
‑
拉杆四、8
‑
摇臂一、9
‑
摇臂二、10
‑
摇臂三。
具体实施方式
13.如图1和图2所示,本发明所述的一种地面解决飞机平衡速度异常的方法,所述方法包括以下步骤:步骤1: 查询到平衡速度异常的飞机平衡速度试飞飞行飞参中,设计平衡速度飞机平飞所需的平飞偏度δz0和对应的纵向驾驶杆位移xz0;步骤2:将平衡速度异常的飞机不做任何调整,驾驶杆在无人操纵情况下,将操纵系统中的力臂调节器切换至自动状态,直接进行地面抽动静压模拟试验,即进行地面模拟试验1,模拟气压高度3000m时的设计平衡速度,测量变臂偏度,并查询到对应表速的地面试验飞参平飞偏度δz1和对应的纵向驾驶杆位移xz1,此时杆位移xz1对应杆力为零;步骤3:根据步骤1和步骤2结果,计算出设计平衡速度空中飞行和地面模拟飞参相同平飞偏度时,纵向驾驶杆位移差量dxz= xz0
‑
δz0/(δz1/xz1);
步骤4:根据步骤3计算的纵向驾驶杆位移差量,按技术条件,通过操纵系统进行参数调整,具体调整方式是指对操纵系统中的拉杆一、拉杆二、拉杆三和拉杆四按技术条件进行长度调整,通过调节力臂调节器的倾斜方向,即可对拉杆一、拉杆二、拉杆三和拉杆四的长度进行调整,使其符合纵向驾驶杆位移差量;步骤5:再次进行地面动静压模拟试验,其试验条件同步骤2,即进行地面模拟试验2,得到地面试验飞参平飞偏度δz2和对应的纵向驾驶杆位移xz2,此时杆位移xz2所对应的杆力为零;步骤6:换算空中飞行杆力为零时杆位移xz3=δz0/(δz2/xz2) dxz,若xz3≈xz0,则飞机空中飞行平衡速度条件满足;否则,不满足要求,则重复步骤4~步骤6。
14.进一步地,本发明所述的一种地面解决飞机平衡速度异常的方法,其中所述操纵系统包括力臂调节器1、载荷机构2、调效机构3、拉杆一4、拉杆二5、拉杆三6、拉杆四7和摇臂,所述摇臂设有三个,分别为摇臂一8、摇臂二9和摇臂三10,所述拉杆一4的一端与摇臂一8连接,另一端与力臂调节器1连接,所述载荷机构2和调效机构3之间通过摇臂二9连接,所述载荷机构2的另一端通过拉杆二5与力臂调节器1连接,所述拉杆三6和拉杆四7之间通过摇臂三10连接,所述拉杆三6的另一端与力臂调节器1连接,在所述摇臂的作用下,通过所述力臂调节器1可以分别对拉杆一4、拉杆二5、拉杆三6和拉杆四7的长度进行调整。
15.针对飞机平衡试飞平衡速度异常,通过传统方法解决平衡速度异常只能通过多次调整多次试飞的方法,因飞行成本高昂,使用传统方法处理使得飞机出厂试飞成本较高。而采用本发明所述的方法,可以充分利用地面模拟试验,利用地面抽动静压模拟试验数据和平衡速度异常时平飞飞参数数据,采用换算空中飞行杆力为零杆位移的方法,能够比较准确地利用地面模拟试验数据调整飞机平衡速度操纵系统参数,可有效减少试飞架次数,能够比较准确地利用地面模拟试验数据调整飞机平衡速度操纵系统参数,降低飞机出厂试飞成本。
16.以上所述仅为本发明的优选实施方式,并不用以限制本发明,对于本领域的技术人员来说,可以有各种更改和变化,凡利用本发明所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。