1.本发明涉及一种三相开关磁阻电机四象限复合转速控制方法,属于电机控制领域。
背景技术:
2.开关磁阻电机凭借其简单的结构、低廉的成本、极高的可靠性等特点,成为各种需要驱动电机场合的选择之一,在航空航天、通用工业、新能源交通、装备制造等领域具有良好的应用前景。然而,特殊的双凸极结构以及高度饱和磁路导致开关磁阻电机的电磁特性呈现高度非线性,极大的增加了其控制难度,传统的角度位置控制、电流斩波控制、电压脉宽调制控制等方法较难充分发挥开关磁阻电机的优势性能。
3.在实际应用中,往往需要电驱动系统跟踪动态参考转速,这就要求电机具备四象限运行的能力,亦即在不同转向下运行在电动工况或制动工况。目前,对于开关磁阻电机控制方法的研究多集中于转矩波动的抑制,涌现出了直接转矩控制、直接瞬时转矩控制、转矩分配函数控制等方法,然而针对四象限运行的控制方法研究还很少。有鉴于此,本发明公开了一种三相开关磁阻电机四象限复合转速控制方法,可以在抑制转矩波动的同时实现电机的四象限运行,并且还能够兼顾电机的效率,对于开关磁阻电机的四象限转速伺服应用具有重要的意义。
技术实现要素:
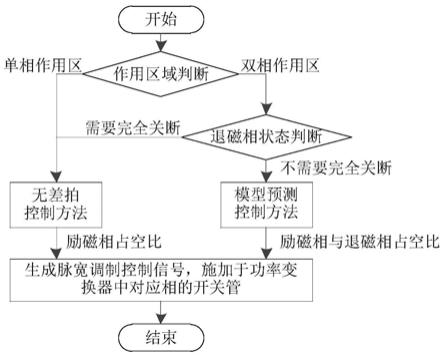
4.本发明公开了一种三相开关磁阻电机四象限复合转速控制方法,对模型预测控制方法进行改进,并与无差拍控制方法相结合,继而扩展至制动运行工况,在抑制转矩波动的同时,实现三相开关磁阻电机的四象限转速控制,方法实现步骤如下:
5.步骤一:判断开关磁阻电机相绕组的作用区域,单相作用区,转至步骤二,双相作用区,转至步骤三;
6.步骤二:在正转的单相作用区,不论是电动工况还是制动工况,采用无差拍控制方法;通过ψ(k 1)=ψ(k) [u
dc
d
‑
i(k)r]t
s
估算下一采样时刻两个退磁相的磁链,其中ψ(k 1)为下一采样时刻的相磁链,ψ(k)为当前采样时刻的相磁链,u
dc
为母线电压,d为占空比,i(k)为当前采样时刻的相电流,r为相电阻,t
s
为采样周期;通过θ(k 1)=θ(k) ωt
s
估算下一采样时刻两个退磁相的转子位置,其中θ(k 1)为下一采样时刻的转子位置,θ(k)为当前采样时刻的转子位置,ω为电机转速;利用下一采样时刻两个退磁相的磁链与转子位置,通过查询表i(ψ,θ)得到下一采样时刻两个退磁相的相电流,再通过查询表t(i,θ)得到下一采样时刻两个退磁相的相转矩t
o1
(k 1)与t
o2
(k 1);通过t
refi
(k 1)=t
ref
(k)
‑
t
o1
(k 1)
‑
t
o2
(k 1)计算下一采样时刻励磁相的参考转矩,其中t
refi
(k 1)为下一采样时刻励磁相的参考转矩,t
ref
(k)为由转速环得到的当前采样时刻的总参考转矩;利用t
refi
(k 1),通过查询表i(t,θ)得到下一采样时刻励磁相的参考电流,再通过查询表ψ(i,θ)得到下一采样时刻励磁相的参考磁链ψ
refi
(k 1);利用ψ
refi
(k 1),通过u
i
(k)=i(k)r [ψ
refi
(k 1)
‑
ψ
i
(k)]/t
s
得到当前采样
时刻励磁相需要施加的相电压u
i
(k),其中ψ
i
(k)为当前采样时刻励磁相的相磁链,而后通过d
i
(k)=u
i
(k)/u
dc
得到当前采样时刻励磁相脉宽调制控制信号的占空比d
i
(k),将此脉宽调制控制信号施加于功率变换器中励磁相对应的开关管,完成控制;对于反转的单相作用区,不论是电动工况还是制动工况,其控制过程与正转的单相作用区相比,区别仅在于励磁相序;定义三相开关磁阻电机的相分别为a相、b相和c相,正转的励磁相序为a
‑
b
‑
c,则反转的相序为a
‑
c
‑
b;
[0007]
步骤三:在双相作用区,通过(τ/2
‑
θ
o
)/ω与ψ
o
/u
dc
之间的大小关系确定退磁相是否需要进入完全关断状态,其中τ为转子极距,θ
o
为退磁相转子位置,ψ
o
为退磁相相磁链;当(τ/2
‑
θ
o
)/ω>ψ
o
/u
dc
时,退磁相不需要进入完全关断状态,转至步骤四,当(τ/2
‑
θ
o
)/ω≤ψ
o
/u
dc
时,退磁相需要进入完全关断状态,并采用单相作用区的无差拍控制方法,转至步骤二;
[0008]
步骤四:开关磁阻电机正转,不论是电动工况还是制动工况,在双相作用区,且退磁相不需要进入完全关断状态时,采用模型预测控制方法;假设各相在下一采样时刻的磁链ψ(k 1)等于当前采样时刻的磁链ψ(k),通过θ(k 1)=θ(k) ωt
s
估算下一采样时刻各相的转子位置;利用ψ(k 1)与θ(k 1),通过查询表i(ψ,θ)得到下一采样时刻各相的相电流,再通过查询表t(i,θ)得到下一采样时刻各相的相转矩,而后通过累加得到下一采样时刻电机的总转矩t(k 1);当|t
ref
(k)|>|t(k 1)|时,从有限集{0,1/8,1/4,3/8,1/2,5/8,3/4,7/8,1}中选取励磁相脉宽调制控制信号的占空比,通过ψ(k 1)=ψ(k) [u
dc
d
‑
i(k)r]t
s
估算下一采样时刻励磁相的相磁链,利用ψ(k 1)和θ(k 1),通过查询表i(ψ,θ)得到下一采样时刻励磁相的相电流,再通过查询表t(i,θ)得到下一采样时刻励磁相的相转矩t
i
(k 1);通过t
refo
(k 1)=t
ref
(k)
‑
t
i
(k 1)获得下一采样时刻退磁相的参考转矩t
refo
(k 1),进而通过查询表i(t,θ)以及ψ(i,θ)得到下一采样时刻退磁相的相电流i
o
(k 1)与相磁链ψ
o
(k 1),利用相磁链,通过u
o
(k)=i(k)r [ψ
o
(k 1)
‑
ψ
o
(k)]/t
s
得到当前采样时刻退磁相需要施加的相电压u
o
(k),其中ψ
o
(k)为当前采样时刻退磁相的相磁链,而后通过d
o
(k)=u
o
(k)/u
dc
得到当前采样时刻退磁相脉宽调制控制信号的占空比;当|t
ref
(k)|≤|t(k 1)|时,从有限集{0,
‑
1/8,
‑
1/4,
‑
3/8,
‑
1/2,
‑
5/8,
‑
3/4,
‑
7/8,
‑
1}中选取退磁相脉宽调制控制信号的占空比,这里的负占空比表明施加的相电压是负的,通过ψ(k 1)=ψ(k) [u
dc
d
‑
i(k)r]t
s
估算下一采样时刻退磁相的相磁链,利用ψ(k 1)和θ(k 1),通过查询表i(ψ,θ)得到下一采样时刻退磁相的相电流,再通过查询表t(i,θ)得到下一采样时刻退磁相的相转矩t
o
(k 1);通过t
refi
(k 1)=t
ref
(k)
‑
t
o
(k 1)获得下一采样时刻励磁相的参考转矩t
refi
(k 1),进而通过查询表i(t,θ)以及ψ(i,θ)得到下一采样时刻励磁相的相电流i
i
(k 1)与相磁链ψ
i
(k 1),利用相磁链,通过u
i
(k)=i(k)r [ψ
i
(k 1)
‑
ψ
i
(k)]/t
s
得到当前采样时刻励磁相需要施加的相电压u
i
(k),而后通过d
i
(k)=u
i
(k)/u
dc
得到当前采样时刻励磁相脉宽调制控制信号的占空比;以上两种情况下,选择有限集中的哪个数作为励磁相或退磁相的占空比,依据的原则是使代价函数j=q
i
i q
e
{[(τ/2
‑
θ)/ω
‑
ψ
o
/u
dc
]/t
s
‑1‑
f}2的值最小,其中i为下一时刻励磁相和退磁相相电流的平方和,f为从1到9的整数,对应以上两个有限集中的9个占空比,占空比的绝对值越大,f就越小;依据以上两种情况下获取的励磁相与退磁相的占空比,生成脉宽调制控制信号,并分别施加于功率变换器中对应相的开关管,完成控制;开关磁阻电机反转,不论是电动工况还是制动工况,在双相作用区,且退磁相不需要进入完全关断状态时,其控制过程与正转的双相
作用区相比,区别仅在于励磁相序;定义三相开关磁阻电机的相分别为a相、b相和c相,正转的励磁相序为a
‑
b
‑
c,则反转的相序为a
‑
c
‑
b。
附图说明
[0009]
图1为开关磁阻电机四象限复合转速控制方法流程图。
[0010]
图2为三相12/8极开关磁阻电机正向电动状态相绕组作用区域判断依据。
具体实施方式
[0011]
以下结合附图和具体实例,对本发明的技术方案进行详细说明。实例所用电机为一个三相12/8极开关磁阻电机,且工作于正向电动状态,本发明所公开的四象限复合转速控制方法在该电机上的实施流程如图1所示,具体步骤如下:
[0012]
步骤一:判断开关磁阻电机相绕组的作用区域,单相作用区,转至步骤二,双相作用区,转至步骤三;对于实例所用三相12/8极开关磁阻电机,在正向电动状态下,其相绕组作用区域判断依据如图2所示。
[0013]
步骤二:采用无差拍控制方法,通过ψ(k 1)=ψ(k) [u
dc
d
‑
i(k)r]t
s
估算下一采样时刻两个退磁相的磁链,通过θ(k 1)=θ(k) ωt
s
估算下一采样时刻两个退磁相的转子位置;利用下一采样时刻两个退磁相的磁链与转子位置,通过查询表i(ψ,θ)得到下一采样时刻两个退磁相的相电流,再通过查询表t(i,θ)得到下一采样时刻两个退磁相的相转矩t
o1
(k 1)与t
o2
(k 1);通过t
refi
(k 1)=t
ref
(k)
‑
t
o1
(k 1)
‑
t
o2
(k 1)计算下一采样时刻励磁相的参考转矩t
refi
(k 1);利用t
refi
(k 1),通过查询表i(t,θ)得到下一采样时刻励磁相的参考电流,再通过查询表ψ(i,θ)得到下一采样时刻励磁相的参考磁链ψ
refi
(k 1);利用ψ
refi
(k 1),通过u
i
(k)=i(k)r [ψ
refi
(k 1)
‑
ψ
i
(k)]/t
s
得到当前采样时刻励磁相需要施加的相电压u
i
(k),而后通过d
i
(k)=u
i
(k)/u
dc
得到当前采样时刻励磁相脉宽调制控制信号的占空比d
i
(k),将此脉宽调制控制信号施加于功率变换器中励磁相对应的开关管,完成控制;
[0014]
步骤三:在双相作用区,通过(τ/2
‑
θ
o
)/ω与ψ
o
/u
dc
之间的大小关系确定退磁相是否需要进入完全关断状态;对于实例所用三相12/8极开关磁阻电机,转子极距为45
°
,当(22.5
°‑
θ
o
)/ω>ψ
o
/u
dc
时,退磁相不需要进入完全关断状态,转至步骤四,当(22.5
°‑
θ
o
)/ω≤ψ
o
/u
dc
时,退磁相需要进入完全关断状态,并采用单相作用区的无差拍控制方法,转至步骤二;
[0015]
步骤四:采用模型预测控制方法,假设各相在下一采样时刻的磁链ψ(k 1)等于当前采样时刻的磁链ψ(k),通过θ(k 1)=θ(k) ωt
s
估算下一采样时刻各相的转子位置;利用ψ(k 1)与θ(k 1),通过查询表i(ψ,θ)得到下一采样时刻各相的相电流,再通过查询表t(i,θ)得到下一采样时刻各相的相转矩,而后通过累加得到下一采样时刻电机的总转矩t(k 1);当|t
ref
(k)|>|t(k 1)|时,从有限集{0,1/8,1/4,3/8,1/2,5/8,3/4,7/8,1}中选取励磁相脉宽调制控制信号的占空比,通过ψ(k 1)=ψ(k) [u
dc
d
‑
i(k)r]t
s
估算下一采样时刻励磁相的相磁链,利用ψ(k 1)和θ(k 1),通过查询表i(ψ,θ)得到下一采样时刻励磁相的相电流,再通过查询表t(i,θ)得到下一采样时刻励磁相的相转矩t
i
(k 1);通过t
refo
(k 1)=t
ref
(k)
‑
t
i
(k 1)获得下一采样时刻退磁相的参考转矩t
refo
(k 1),进而通过查询表i(t,θ)以及ψ(i,θ)得到下一采样时刻退磁相的相电流i
o
(k 1)与相磁链ψ
o
(k 1),利用相磁链,通过u
o
(k)=i
(k)r [ψ
o
(k 1)
‑
ψ
o
(k)]/t
s
得到当前采样时刻退磁相需要施加的相电压u
o
(k),而后通过d
o
(k)=u
o
(k)/u
dc
得到当前采样时刻退磁相脉宽调制控制信号的占空比;当|t
ref
(k)|≤|t(k 1)|时,从有限集{0,
‑
1/8,
‑
1/4,
‑
3/8,
‑
1/2,
‑
5/8,
‑
3/4,
‑
7/8,
‑
1}中选取退磁相脉宽调制控制信号的占空比,通过ψ(k 1)=ψ(k) [u
dc
d
‑
i(k)r]t
s
估算下一采样时刻退磁相的相磁链,利用ψ(k 1)和θ(k 1),通过查询表i(ψ,θ)得到下一采样时刻退磁相的相电流,再通过查询表t(i,θ)得到下一采样时刻退磁相的相转矩t
o
(k 1);通过t
refi
(k 1)=t
ref
(k)
‑
t
o
(k 1)获得下一采样时刻励磁相的参考转矩t
refi
(k 1),进而通过查询表i(t,θ)以及ψ(i,θ)得到下一采样时刻励磁相的相电流i
i
(k 1)与相磁链ψ
i
(k 1),利用相磁链,通过u
i
(k)=i(k)r [ψ
i
(k 1)
‑
ψ
i
(k)]/t
s
得到当前采样时刻励磁相需要施加的相电压u
i
(k),而后通过d
i
(k)=u
i
(k)/u
dc
得到当前采样时刻励磁相脉宽调制控制信号的占空比;以上两种情况下,对选择有限集中不同数作为占空比的情况进行比较,使代价函数j=q
i
i q
e
{[(τ/2
‑
θ)/ω
‑
ψ
o
/u
dc
]/t
s
‑1‑
f}2的值最小的便是最优方案;依据所获取的占空比,生成脉宽调制控制信号,并分别施加于功率变换器中对应相的开关管,完成控制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。