1.本实用新型涉及活塞加工技术领域,尤其涉及一种活塞数控加工自动化机械手系统单元。
背景技术:
2.目前,活塞在加工过程中,需要通过止口机、镗孔机、头部机、精外机、绞孔机进行加工,在加工过程中,常规形式是采用人工方式,在一个机器中完成一道工序后,再采用人工方式将活塞装入到另一个机器中,再继续下一道工序,这种方式的缺陷是人工转移速度慢,工作效率低,生产效率低,人工转移不稳定,易造成产品质量降低。
技术实现要素:
3.本实用新型要解决上述现有技术存在的问题,提供一种活塞数控加工自动化机械手系统单元,通过机械手自动识别抓取来实现活塞的自动化加工过程,提高了工作效率,提高了生产效率,提高了活塞加工的稳定性,提高了产品质量,减少了操作人员数量,降低了人工成本。
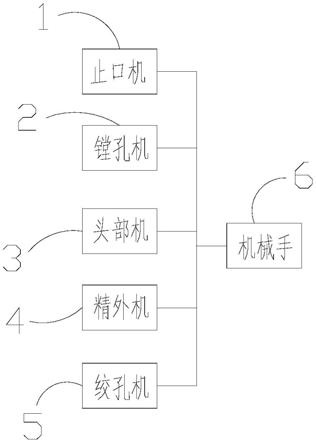
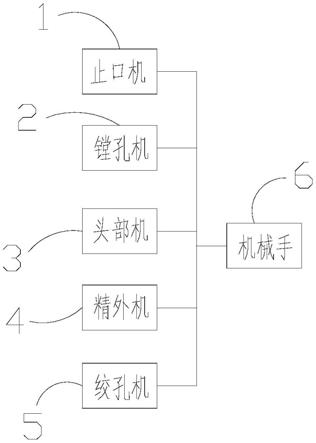
4.本实用新型解决其技术问题采用的技术方案:这种活塞数控加工自动化机械手系统单元,包括止口机、镗孔机、头部机、精外机、绞孔机、机械手,止口机、镗孔机、头部机、精外机、绞孔机呈纵向排列状态设置,或呈横向排列状态设置,止口机、镗孔机、头部机、精外机、绞孔机均与机械手连接,该机械手位于止口机、镗孔机、头部机、精外机、绞孔机一侧进行自动识别抓取。
5.机械手采用五轴机器人或者六轴机器人。
6.机械手上设置有控制器。
7.控制器采用plc可编程逻辑控制器。
8.控制器上连接有人机界面。
9.本实用新型有益的效果是:本实用新型的活塞数控加工自动化机械手系统单元,通过机械手自动识别抓取来实现活塞的自动化加工过程,提高了工作效率,提高了生产效率,提高了活塞加工的稳定性,提高了产品质量,通过止口机、镗孔机、头部机、精外机、绞孔机的纵向排列状态设置,缩小机械手行程距离长度,使机械手上下行程缩短,进一步提高了工作效率,减少了操作人员数量,降低了人工成本,使用效果好,利于推广。
附图说明
10.图1为本实用新型实施例的纵向排列状态结构示意图;
11.图2为本实用新型实施例的横向排列状态示意图;
12.图3为本实用新型实施例的连接框图。
13.附图标记说明:止口机1,镗孔机2,头部机3,精外机4,绞孔机5,机械手6,控制器7,人机界面8。
具体实施方式
14.下面结合附图对本实用新型作进一步说明:
15.参照附图:本实施例中的活塞数控加工自动化机械手系统单元,包括止口机1、镗孔机2、头部机3、精外机4、绞孔机5、机械手6,止口机1、镗孔机2、头部机3、精外机4、绞孔机5呈纵向排列状态设置,或呈横向排列状态设置,止口机1、镗孔机2、头部机3、精外机4、绞孔机5均与机械手6连接,该机械手位于止口机1、镗孔机2、头部机3、精外机4、绞孔机5一侧进行自动识别抓取。
16.机械手6采用五轴机器人或者六轴机器人。
17.机械手6上设置有控制器7。
18.控制器7采用plc可编程逻辑控制器。
19.控制器7上连接有人机界面8。
20.控制器7采用plc可编程逻辑控制器,按照设定的程序执行工作,止口机1、镗孔机2、头部机3、精外机4、绞孔机5的纵向排列状态设置,能够缩小机械手6行程距离长度,使机械手6上下行程缩短,使机器加工结束后单边开门,让位给机械手6,减少机械手的上下行走距离。
21.止口机1、镗孔机2、头部机3、精外机4、绞孔机5内的转轴定位角度按照需求进行定位,机械装夹、活塞寻位装夹、上机安装角度在人机界面8上可调,进行自动化生产加工操作。
22.人机界面8采用触摸式显示屏。
23.工作时,操作人员将待加工的活塞固定模型到输送带,再依台级式自动送料凿边,上料完毕后,再通过机械手6识别抓取,依次通过止口机1、镗孔机2、头部机3、精外机4、绞孔机5进行自动化加工,实现自动化加工的过程,原先需要四人或五人才能进行正常加工,通过本实用新型的活塞数控加工自动化机械手系统单元,只需一至二人即可完成正常加工,减少了操作人员数量,降低了人工成本。
24.在本实用新型中,止口机1、镗孔机2、头部机3、精外机4、绞孔机5呈纵向排列状态时,工作原理与呈横向排列状态时的工作原理相同。
25.本实用新型实施例的特点是:通过机械手6自动识别抓取来实现活塞的自动化加工过程,提高了工作效率,提高了生产效率,提高了活塞加工的稳定性,提高了产品质量,通过止口机1、镗孔机2、头部机3、精外机4、绞孔机5的纵向排列状态设置,缩小机械手行程距离长度,使机械手上下行程缩短,进一步提高了工作效率,减少了操作人员数量,降低了人工成本,使用效果好,利于推广。
26.虽然本实用新型已通过参考优选的实施例进行了图示和描述,但是,本专业普通技术人员应当了解,在权利要求书的范围内,可作形式和细节上的各种各样变化。
技术特征:
1.一种活塞数控加工自动化机械手系统单元,其特征在于:包括止口机(1)、镗孔机(2)、头部机(3)、精外机(4)、绞孔机(5)、机械手(6),所述止口机(1)、镗孔机(2)、头部机(3)、精外机(4)、绞孔机(5)呈纵向排列状态设置,或呈横向排列状态设置,所述止口机(1)、镗孔机(2)、头部机(3)、精外机(4)、绞孔机(5)均与机械手(6)连接,该机械手位于止口机(1)、镗孔机(2)、头部机(3)、精外机(4)、绞孔机(5)一侧进行自动识别抓取。2.根据权利要求1所述的活塞数控加工自动化机械手系统单元,其特征在于:所述机械手(6)采用五轴机器人或者六轴机器人。3.根据权利要求1所述的活塞数控加工自动化机械手系统单元,其特征在于:所述机械手(6)上设置有控制器(7)。4.根据权利要求3所述的活塞数控加工自动化机械手系统单元,其特征在于:所述控制器(7)采用plc可编程逻辑控制器。5.根据权利要求3所述的活塞数控加工自动化机械手系统单元,其特征在于:所述控制器(7)上连接有人机界面(8)。
技术总结
一种活塞数控加工自动化机械手系统单元,包括止口机、镗孔机、头部机、精外机、绞孔机、机械手,止口机、镗孔机、头部机、精外机、绞孔机呈纵向排列状态设置,或呈横向排列状态设置,该机械手位于止口机、镗孔机、头部机、精外机、绞孔机一侧进行自动识别抓取,本实用新型有益的效果是:通过机械手自动识别抓取来实现活塞的自动化加工过程,提高了工作效率,提高了生产效率,提高了产品质量,通过止口机、镗孔机、头部机、精外机、绞孔机的纵向排列状态设置,或横向排列状态设置,使机械手上下行程缩短,进一步提高了工作效率,减少了操作人员数量,降低了人工成本,使用效果好,利于推广。利于推广。利于推广。
技术研发人员:王武法
受保护的技术使用者:王武法
技术研发日:2021.06.07
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。