1.本发明涉及大气检测技术领域,尤其涉及一种基于激光大气碳排放检测方法。
背景技术:
2.全球气候变暖的主要原因是由于人类在自身发展过程中对能源的过度使用 和自然资源的过度开发,造成大气中温室气体的浓度以极快的速度增长所致。其 中二氧化碳、甲烷等均为主要温室气体。无论是控制碳排放,推动碳排放尽早达 到峰值,还是碳补偿,都需要利用碳排放监测系统。
3.碳排放检测目标的确立对科技创新,特别是整体技术布局及技术发展方向提出了全新的发展方向。与环境监测相比,碳排放监测系统更为复杂。目前国内外对碳排放监测手段尚不完善,因此有必要开发一种基于激光大气碳排放检测方法,以适应不同检测场景的需求。
技术实现要素:
4.本发明目的就是为了弥补已有技术的缺陷,提供一种基于激光大气碳排放检测方法。
5.本发明是通过以下技术方案实现的:一种基于激光大气碳排放检测方法,采用2003nm波段的激光器测量co2,采用1654nm波段的激光器测量ch4,通过主控模块分时产生两路调制信号输出给激光器驱动模块,激光器驱动模块驱动两个激光器发出激光,两束激光采用光纤合束器进行合束,合束后的激光通过固定长度的多次反射吸收池,所述的吸收池内安装有吸气泵,使用内置吸气泵实时置换吸收池内的空气,所述的吸收池的尾部安装有探测器,激光穿出吸收池后被探测器探测,探测器将光信号转换为电信号,并将电信号发送给主控模块,主控模块实时计算出大气中co2和ch4浓度的波动。
6.所述的主控模块包括有主控板,主控板分时产生两路调制信号输出给激光器驱动模块,调制信号采用锯齿波形进行调制,其中锯齿波频率为1khz;主控板分时扫描在切换通道同步生成一个触发信号,用于触发外部adc采集该通道的探测器信号;主控模块还包括一路用于解调探测器信号的锁相放大电路,所述主控板还与上位机数据交换。
7.所述的测量ch4的激光器和测量co2的激光器采用分时扫描的方式出光,即主控板在获取到ch4通道数据后,关闭测量ch4的激光器,打开测量co2的激光器,当主控板在处理ch4通道数据时,adc在采集co2通道数据,至主控板处理完ch4通道数据后,关闭测量co2的激光器,打开测量ch4的激光器,主控板开始获取并处理co2通道数据,adc开始采集ch4通道数据,至主控板处理完co2通道数据后,关闭测量ch4的激光器,打开测量co2的激光器,主控板开始获取并处理ch4通道数据,如此循环。
8.所述的激光器驱动模块包括有激光器tec驱动和激光器ld驱动,所述激光器tec驱动采用高精度温控驱动芯片,利用激光器的热敏电阻产生的电压,通过仪表放大器放大后
与设定的目标电压通过一个差分运算放大器进行比较,产生一个偏差电压,pid补偿网络根据偏差电压的值对激光器的相位进行补偿,同时通过h桥输出电流来控制tce的制冷和制热,从而控制激光器温度;所述激光器ld驱动是一个运算放大器和一个n
‑
mos组成的横流驱动电路,其扫描电流为50ma
‑
120ma。
9.所述的两个激光器均为蝶形激光器,中心波长为1654nm的激光器为nel蝶形激光器,中心波长为2003nm的激光器为eblana蝶形激光器。
10.所述的光纤合束器为1:1波段1500nm
‑
2100nm的分束器,逆向使用为合束器。
11.所述的吸收池包括有密闭结构的吸收池主体,在吸收池主体上设有进气口和出气口,吸气泵的两端分别连接进气口和出气口,在吸收池主体内安装有高反射镜一和高反射镜二,合束后的激光从高反射镜一的小孔射入,直射到高反射镜二发生第一反射后返回高反射镜一,再反射到高反射镜二,如此反复,最后从高反射镜二的下端小口射出,打到探测器上。
12.所述的吸气泵为微型真空电动隔膜泵,采用epdm隔膜,在吸气泵下面安装有柔性橡胶材质的安装底座。
13.本发明应用激光吸收光谱技术,对大气气中主要温室气体co2和ch4的浓度测量方法进行研究,整体构建激光大气碳排放检测试验平台系统,其中对目标气体组分co2、ch4的测量分别采用中心波长为2003nm、1654nm的激光器,内置一个3m长光程的多次反射吸收池,采用泵吸的方式置换吸收池内部的气体。本发明内置长光程多次反射吸收池的调节,其具体实现方法为使用可见红光耦合进光纤,调节光纤头在使激光在两面反射镜中多次反射,最后激光在特定位置射出,打到探测器上。分时扫描的方式使得一个探测器能够检测两个激光器的信号。为保证两个激光器的中心出光频率稳定,本发明利用大气中的co2和ch4的吸收对激光器进行实时中心频率校准。洁净的大气中co2浓度约为400ppm,ch4浓度约为1.8ppm,当设备检测到充入的气体中的co2浓度低于5ppm时,设备将停止对co2激光器中心频率进行校准。当设备检测到充入的气体中的ch4低于100ppb时,设备将停止对ch4激光器中心频率进行校准。本发明扣除ch4通道水汽的影响,根据激光气体吸收光谱可知,在波长为1653.5nm附近有水汽吸收,干燥空气中的水汽含量约为2%vol左右,其吸收强度与大气中甲烷吸收强度相当。且ch4吸收中心波长为1653.7nm左右,两者波长位置相近,在2f信号中会出现两个峰。本发明设计利用固定浓度的水汽进行吸收度拟合,在计算ch4同时时,扣除拟合后的水汽吸收图谱,得到ch4单一的吸收图谱。同时也可计算出当前水汽的浓度,水汽也为温室气体,可做为碳排放检测拓展组分显示出来。
14.本发明的优点是:本发明应用激光吸收光谱技术,对大气中co2和ch4浓度的测量方法进行研究,整体构建激光大气碳排放试验平台系统,实现对大气碳排放24小时实时在线监测,加强我国碳排放监测与治理的基础理论研究、体系建设和相关技术装备研发,缩小与发达国家的差距,增强我国大气污染控制与处置能力,解决现阶段监管方式和手段的不足,增强大气碳排放监测能力。
附图说明
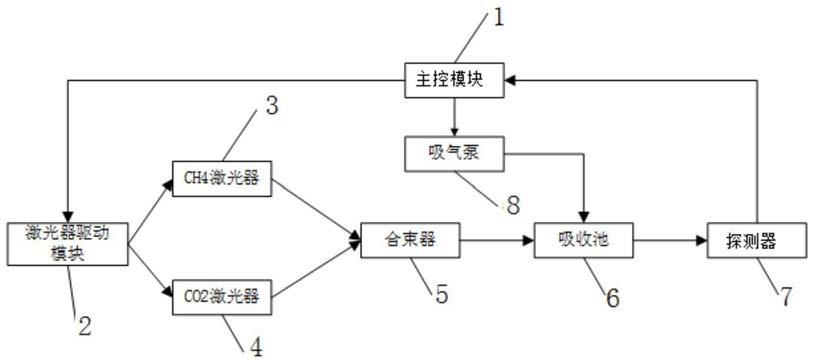
15.图1为本发明的检测示意图。
16.图2为本发明多次反射吸收池结构示意图。
具体实施方式
17.以下实施例仅用于更加清楚的说明本发明的技术方案,而不能以此来限制本发明的保护范围。如在说明书及权利要求当中使用了某些词汇来指称特定部件。本领域技术人员应可理解,硬件制造商可能会用不同名词来称呼同一个部件。本说明书及权利要求并不以名称的差异来做为区分部件的方式,而是以部件在功能上的差异来做为区分的准则。说明书后续描述为实施本发明的较佳实施方式,然所述描述乃以说明本新型的一般原则为目的,并非用以限定本发明的范围。本发明的保护范围当视所附权利要求所界定者为准。
18.下面将结合附图,对本发明实例中的技术方案进行清楚、完整地描述。
19.参照附图1和图2,一种基于激光大气碳排放检测方法,采用2003nm波段的激光器4测量co2,采用1654nm波段的激光器3测量ch4,通过主控模块1分时产生两路调制信号输出给激光器驱动模块2,激光器驱动模块2驱动两个激光器发出激光,两束激光采用光纤合束器5进行合束,合束后的激光通过固定长度的多次反射吸收池6,所述的吸收池6内安装有吸气泵8,使用内置吸气泵8实时置换吸收池内的空气,所述的吸收池6的尾部安装有探测器7,激光穿出吸收池6后被探测器7探测,探测器7将光信号转换为电信号,并将电信号发送给主控模块1,主控模块1实时计算出大气中co2和ch4浓度的波动。
20.所述的主控模块1包括有主控板,主控板分时产生两路调制信号输出给激光器驱动模块,调制信号采用锯齿波形进行调制,其中锯齿波频率为1khz;主控板分时扫描在切换通道同步生成一个触发信号,用于触发外部adc采集该通道的探测器信号;主控模块还包括一路用于解调探测器信号的锁相放大电路,所述主控板还与上位机数据交换。
21.所述的测量ch4的激光器3和测量co2的激光器4采用分时扫描的方式出光,即主控板在获取到ch4通道数据后,关闭测量ch4的激光器3,打开测量co2的激光器4,当主控板在处理ch4通道数据时,adc在采集co2通道数据,至主控板处理完ch4通道数据后,关闭测量co2的激光器4,打开测量ch4的激光器3,主控板开始获取并处理co2通道数据,adc开始采集ch4通道数据,至主控板处理完co2通道数据后,关闭测量ch4的激光器3,打开测量co2的激光器4,主控板开始获取并处理ch4通道数据,如此循环。
22.所述的激光器驱动模块2包括有激光器tec驱动和激光器ld驱动,所述激光器tec驱动采用高精度温控驱动芯片,利用激光器的热敏电阻产生的电压,通过仪表放大器放大后与设定的目标电压通过一个差分运算放大器进行比较,产生一个偏差电压,pid补偿网络根据偏差电压的值对激光器的相位进行补偿,同时通过h桥输出电流来控制tce的制冷和制热,从而控制激光器温度;所述激光器ld驱动是一个运算放大器和一个n
‑
mos组成的横流驱动电路,其扫描电流为50ma
‑
120ma。
23.所述的两个激光器均为蝶形激光器,中心波长为1654nm的激光器为nel蝶形激光器,中心波长为2003nm的激光器为eblana蝶形激光器。
24.所述的光纤合束器5为1:1波段1500nm
‑
2100nm的分束器,逆向使用为合束器。
25.所述的吸收池6包括有密闭结构的吸收池主体9,在吸收池主体9上设有进气口10和出气口11,吸气泵的两端分别连接进气口10和出气口11,在吸收池主体9内安装有高反射镜一12和高反射镜二13,合束后的激光从高反射镜一12的小孔射入,直射到高反射镜二13发生第一反射后返回高反射镜一12,再反射到高反射镜二13,如此反复,最后从高反射镜二13的下端小口射出,打到探测器7上。通过设计两面反射镜之间的距离和反射次数,便可以
计算出实际的气体吸收光程。
26.所述的吸气泵6为微型真空电动隔膜泵,采用epdm隔膜,具有较好的抗耐性。吸气泵的安装底座为橡胶材质,具有消音减震的作用,在吸气泵下面安装有柔性橡胶材质的安装底座。
27.本发明的工作流程如下:系统开机后设备进入自检状态,指示灯以1hz的频率闪烁。完成自检后,吸气泵打开,开始置换内部气体,设备进入正常工作方式,指示灯以5hz频率闪烁。
28.本发明应用激光吸收光谱技术,对大气中的co2和ch4的气体浓度测量方法进行研究,整体构建泵吸式激光气体检测平台系统,其中测量co2使用的激光器为2003nm波段,测量ch4使用的激光器为1654nm波段。两个激光器采用1:1光纤合束器5进行合束,合束后的激光通过固定长度的多次反射吸收池6,两种气体组分的测量共用一个探测器7,两种激光器采用分时调制的方式测量两种气体,使用内置吸气泵实时置换吸收池内的空气,从而实时检测出大气中co2和ch4浓度的波动,测量的浓度数据通过接入大气系统检测平台实时显示当前空气指标。
29.本发明系统采用泵吸式方式置换内部多次反射吸收池中的气体,吸收池6为密闭结构,气体从进气口流入,出气口流出,吸气泵8的进气口接到气池的出气口,确保能全部置换出气池内全部气体。吸气泵安装底座采用柔性橡胶材质,能极大的减少吸气泵工作时的震动。
30.本发明在吸收光谱检测技术中,可以通过增加吸收气体的光程长度,以提高灵敏度,降低检测极限,在固定的体积的机箱内,为获得较大的激光吸收光程,内部吸收池可通过多次反射来扩大光程,其原理是一束激光在距离固定的两面平面镜中来回反射,通过控制来回反射的次数来控制激光吸收光程。
31.本发明使用2个光源通过光纤耦合的方式进行合束成一束激光,耦合方法为逆向使用1:1的光纤分束器,分束器的额定波段为1500nm
‑
2100nm。
32.本发明使用中心波段为1654nm的nel激光器测量ch4气体,使用中心波段为2003nm的ebnala激光器测量co2气体。
33.本发明的ch4光源和co2光源采用分时扫描的方式出光,即主控板在获取到ch4通道数据后,关闭ch4光源,打开co2光源,当主控板在处理ch4通道数据时,adc在采集co2通道数据,至主控板处理完ch4通道数据后,关闭co2光源,打开ch4光源,主控板开始获取并处理co2通道数据,adc开始采集ch4通道数据,至主控板处理完co2通道数据后,关闭ch4光源,打开co2光源,主控板开始获取并处理ch4通道数据,如此循环。
34.本发明为提高灵敏度,降低检测极限,主控板在对原始波形进行高阶fir滤波,rir滤波参数通道导入原始波形样品数据到matlab中,通过仿真计算出fir滤波器的参数。
35.本发明通过充入特定标准浓度的水汽气体,采集并储存ch4通道在1653.5nm波段附近的水汽吸收波形,通过最小二乘法实时拟合ch4通道在当前大气中水汽的吸收,对ch4通道进行水汽干扰扣除,同时检测出大气中水汽的浓度。
36.本发明为避免大气中的悬浮颗粒物对设备内部吸收池的污染,使用过滤器对进入气池前的气体进行过滤预处理。
37.本发明设备具备自检和故障指示功能,能够以指示灯结合故障码的形式反馈系统
错误信息。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。