技术特征:
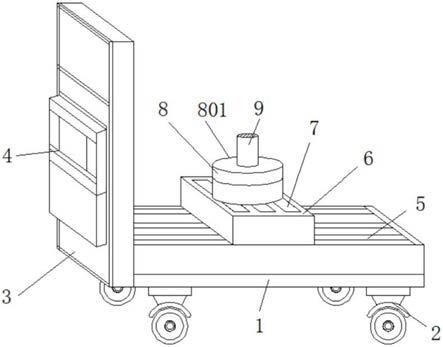
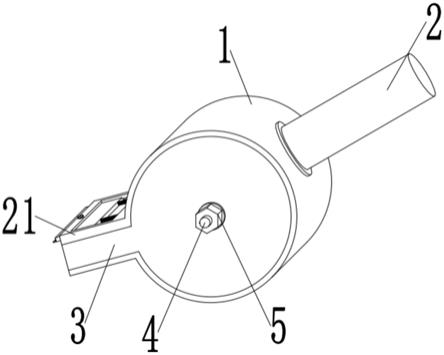
1.一种基于机械手的三工位搬运机构,包括移动搬运底座(1),其特征在于:所述移动搬运底座(1)的下端四角设置有脚轮(2),且移动搬运底座(1)的左侧垂直固定有推板(3),所述推板(3)的侧壁固定有plc控制器(4),所述移动搬运底座(1)的上端固定有左右工位调控结构(5),所述左右工位调控结构(5)的上方设置有前后工位调控结构(6),所述前后工位调控结构(6)的上端面开设有限定槽(7),所述前后工位调控结构(6)的上方设置有角度工位调控结构(8),且角度工位调控结构(8)的输出端连接有机械臂杆(9)。2.根据权利要求1所述的一种基于机械手的三工位搬运机构,其特征在于:所述左右工位调控结构(5)包括电缸(501)、调控轨道(502)、螺母装配头(503)和传动承载块(504),所述电缸(501)的输出端设置有螺母装配头(503),且螺母装配头(503)的一侧连接有传动承载块(504),所述传动承载块(504)的外侧设置有调控轨道(502)。3.根据权利要求2所述的一种基于机械手的三工位搬运机构,其特征在于:所述电缸(501)通过螺母装配头(503)与传动承载块(504)之间构成伸缩结构,且传动承载块(504)与调控轨道(502)之间为滑动连接,并且左右工位调控结构(5)设置有三组。4.根据权利要求1所述的一种基于机械手的三工位搬运机构,其特征在于:所述前后工位调控结构(6)包括工位承载座(601)、丝杆传动单元(602)、限定杆(603)和承载套杆(604),且工位承载座(601)的内部安装有丝杆传动单元(602),所述丝杆传动单元(602)的左右两侧成对称设置有两个限定杆(603),且丝杆传动单元(602)和限定杆(603)的外侧均套设有承载套杆(604)。5.根据权利要求4所述的一种基于机械手的三工位搬运机构,其特征在于:所述丝杆传动单元(602)通过承载套杆(604)与角度工位调控结构(8)之间构成传动结构,且丝杆传动单元(602)与承载套杆(604)螺纹连接。6.根据权利要求1所述的一种基于机械手的三工位搬运机构,其特征在于:所述角度工位调控结构(8)包括装载壳体(801)、固定座(802)、伺服电机(803)和联轴器(804),且装载壳体(801)的内部固定有固定座(802),所述固定座(802)上固定安装有伺服电机(803),且伺服电机(803)的输出端连接有联轴器(804)。7.根据权利要求6所述的一种基于机械手的三工位搬运机构,其特征在于:所述伺服电机(803)通过固定座(802)与装载壳体(801)之间为固定连接,且伺服电机(803)通过联轴器(804)与机械臂杆(9)构成转动结构。
技术总结
本实用新型公开了一种基于机械手的三工位搬运机构,包括移动搬运底座,所述移动搬运底座的下端四角设置有脚轮,且移动搬运底座的左侧垂直固定有推板,所述推板的侧壁固定有PLC控制器,所述移动搬运底座的上端固定有左右工位调控结构,所述左右工位调控结构的上方设置有前后工位调控结构,所述前后工位调控结构的上方设置有角度工位调控结构,且角度工位调控结构的输出端连接有机械臂杆。本实用新型通过设置的PLC控制器能与左右工位调控结构、前后工位调控结构和角度工位调控结构均电性连接,以此能提高搬运机构使用的便捷性与自动化效果;设置的角度工位调控结构能够方便对机械手的工作角度工位进行调节控制,如此能实现机械手三工位的调控。机械手三工位的调控。机械手三工位的调控。
技术研发人员:於艳鹏
受保护的技术使用者:苏州莱盟自动化设备有限公司
技术研发日:2021.07.27
技术公布日:2021/12/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。