1.本实用新型涉及检测技术领域,具体涉及一种用于辅助检测装置的供料装置。
背景技术:
2.现如今在对工件进行电阻检测时,需及时将工件放置在检测位进行检测,检测完成后将工件取走。
3.现有技术中通常为人工取料至检测位进行电阻检测,工件检测完成后,人工收料。然而,在实现本技术过程中,发明人发现现有技术中至少存在如下问题:人工取放料的工作效率低,易刮伤工件,且检测成本高。
技术实现要素:
4.鉴于上述状况,有必要提供一种供料装置,以解决现有的人工取放料的工作效率低,易刮伤工件,且检测成本高的问题。
5.本实用新型提出一种供料装置,该供料装置包括取放料机构和定位翻转机构;所述定位翻转机构包括第一定位组件、第二定位组件、移动组件以及两个相对设置的翻转组件,所述第一定位组件和所述第二定位组件设于两个所述翻转组件之间,所述第二定位组件滑动连接所述移动组件,所述移动组件用于带动所述第二定位组件靠近或远离所述第一定位组件运动,所述第一定位组件和所述第二定位组件用于定位工件,所述翻转组件用于吸附所述第一定位组件或所述第二定位组件上的所述工件,并带动所述工件翻转;所述取放料机构包括上料组件和放料组件,所述上料组件用于取放所述工件并带动所述工件移动至所述第一定位组件或所述第二定位组件上;所述放料组件用于抓取所述第一定位组件和所述第二定位组件上的所述工件,并带动所述工件移动至其他设备上。
6.在一些实施例中,所述第一定位组件和所述第二定位组件分别包括定位平台、固定定位件及滑动定位件,所述定位平台用于放置所述工件,所述定位平台的第一侧和第二侧设有所述固定定位件,所述第一侧垂直于所述第二侧,所述定位平台的第三侧和第四侧滑动设有所述滑动定位件,所述第三侧垂直于所述第一侧,所述第四侧垂直于所述第三侧,所述固定定位件和所述滑动定位件用于定位所述工件。
7.在一些实施例中,所述第一定位组件和所述第二定位组件还包括两个相垂直设置在所述定位平台背面的所述定位驱动件,所述滑动定位件滑动贯穿于所述定位平台两相对侧面,并与相应的所述定位驱动件连接,所述定位驱动件用于驱动所述滑动定位件靠近或远离所述固定定位件,以固定或松开所述工件。
8.在一些实施例中,所述移动组件包括:移动件,所述移动件连接于所述第二定位组件,移动滑轨,所述移动滑轨沿所述第二定位组件的移动方向延伸,所述移动件滑动连接所述移动滑轨,移动驱动件,所述移动驱动件连接于所述移动件,用于驱动所述移动件沿所述移动滑轨靠近或远离所述第一定位组件移动,从而带动所述第二定位组件靠近或远离所述第一定位组件运动。
9.在一些实施例中,所述翻转组件包括支撑架、翻转臂、第一驱动件和第一吸附件,所述第一驱动件连接所述支撑架,所述翻转臂的一端连接于所述的第一驱动件,所述翻转臂的另一端连接有所述第一吸附件,所述第一驱动件通过所述翻转臂带动所述第一吸附件翻转。
10.在一些实施例中,所述第一吸附件包括第一转动部和第一吸附部,所述翻转臂远离所述第一驱动件的一端设有多个所述第一转动部,每个所述第一转动部设置有第一滑槽,所述第一滑槽内滑动设有所述第一吸附部。
11.在一些实施例中,所述上料组件包括上料机器人、上料手爪及料框,所述料框用于存放所述工件,所述上料手爪连接于所述上料机器人,所述上料机器人用于驱动所述上料手爪在所述料框及所述定位翻转机构之间移动,所述上料手爪用于取放所述工件,所述放料组件包括放料机器人及连接于所述放料机器人的放料模组,所述放料机器人用于驱动所述放料模组移动,所述放料模组用于取放所述工件。
12.在一些实施例中,所述上料手爪包括连接臂、取料板、相机模块、吸板及第二吸附件,所述连接臂的一端连接于所述上料机器人,所述连接臂的另一端连接于所述取料板,所述取料板的一侧设有所述相机模块,所述取料板的另一侧连接有所述吸板,所述第二吸附件设置在所述吸板背离所述取料板的一侧。
13.在一些实施例中,所述放料模组包括横向连接杆、纵向连接杆、第二转动部和第二吸附部,所述横向连接杆的两端分别连接有所述纵向连接杆,所述纵向连接杆的两端分别滑动连接有多个所述第二转动部,每个所述第二转动部远离所述纵向连接杆的一端连接有所述第二吸附部。
14.在一些实施例中,所述供料装置进一步包括:收料机构,所述收料机构包括料盘移动夹爪、第二驱动件及两个相对设置的升降模组,所述料盘移动夹爪滑动连接所述第二驱动件,所述第二驱动件用于带动所述料盘移动夹爪在两个升降模组之间移动,所述料盘移动夹爪用于抓取所述料盘,所述升降模组包括用于承载料盘的收料平台及升降滑轨,所述收料平台可滑动地连接所述升降滑轨,所述升降滑轨用于带动所述收料平台上下移动。
15.如此,上述供料装置通过上料组件取料,并将工件移至第一定位组件或第二定位组件上,移动组件驱动第二定位组件靠近或远离第一定位组件运动以使工件固定定位,翻转组件吸附第一定位组件或第二定位组件上固定的工件,且带动工件翻转,放料组件将已翻转的工件移至检测装置处进行检测。相对于现有技术,本实用新型操作简便,提高了检测的效率,避免了刮伤工件,且降低了检测成本。
附图说明
16.图1为本实用新型实施例提供的供料装置的立体结构示意图。
17.图2为图1所示的供料装置中上料组件的立体结构示意图。
18.图3为图2所示的供料装置中上料手爪的立体结构示意图。
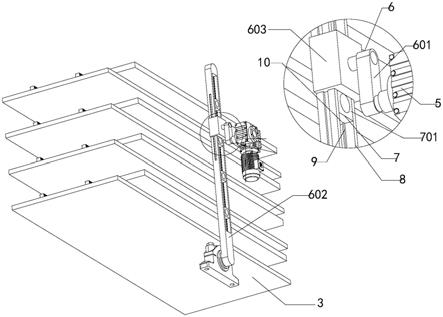
19.图4为图1所示的供料装置中定位翻转机构的立体结构示意图。
20.图5为图1所示的供料装置中定位翻转机构的另一角度的立体结构示意图。
21.图6为图1所示的供料装置中放料组件的立体结构示意图。
22.图7为图6所示的供料装置中放料模组的立体结构示意图。
23.图8为图1所示的供料装置中收料机构及上料机构的立体结构示意图。
24.图9为图8所示的收料机构的立体结构示意图。
25.图10为图9所述的料盘移动夹爪的立体结构示意图。
26.主要元件符号说明
27.供料装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
28.取放料机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
29.上料组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
30.上料机器人
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
31.第一驱动臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
121
32.第二驱动臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
122
33.第一转盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
123
34.上料手爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13
35.连接臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
131
36.取料板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
132
37.相机模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
133
38.吸板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
134
39.第二吸附件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
135
40.光源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
136
41.料框
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
42.放料组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15
43.放料机器人
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16
44.第三驱动臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
161
45.第四驱动臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
162
46.第二转盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
163
47.放料模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17
48.横向连接杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
171
49.第二转动部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
172
50.第二吸附部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
173
51.第二滑槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
174
52.纵向连接杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
175
53.支座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18
54.定位翻转机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
55.安装件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
56.第一定位组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22
57.第二定位组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23
58.定位平台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
231
59.固定定位件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
232
60.滑动定位件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
233
61.定位驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
234
62.移动组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24
63.移动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
241
64.移动滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
242
65.移动驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
243
66.翻转组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
25
67.支撑架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
251
68.翻转臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
252
69.第一驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
253
70.第一吸附件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
254
71.第一转动部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
255
72.第一吸附部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
256
73.第一滑槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
257
74.翻转气缸
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
258
75.转盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
259
76.限位件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
26
77.收料机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30
78.料盘移动夹爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31
79.连接板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
311
80.夹料板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
312
81.夹料驱动部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
313
82.第二驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32
83.收料滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
321
84.移动部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
322
85.升降模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33
86.收料平台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
331
87.收料支撑部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
332
88.收料驱动部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
333
89.升降滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
334
90.料盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
34
91.工件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
92.检测装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50
93.废料台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
60
具体实施方式
94.下面详细描述本实用新型的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
95.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽
度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
96.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
97.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度小于第二特征。
98.下文的公开提供了许多不同的实施方式或例子用来实现本实用新型的不同结构。为了简化本实用新型的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本实用新型。此外,本实用新型可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本实用新型提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
99.本实用新型实施例提出一种供料装置,用于辅助检测装置,包括取放料机构和定位翻转机构;所述定位翻转机构包括第一定位组件、第二定位组件、移动组件以及两个相对设置的翻转组件,所述第一定位组件和所述第二定位组件设于两个所述翻转组件之间,所述第二定位组件滑动连接所述移动组件,所述移动组件用于带动所述第二定位组件靠近或远离所述第一定位组件运动,所述第一定位组件和所述第二定位组件用于定位工件,所述翻转组件用于吸附所述第一定位组件或所述第二定位组件上的所述工件,并带动所述工件翻转;所述取放料机构包括上料组件和放料组件,所述上料组件用于取放所述工件并带动所述工件移动至所述第一定位组件或所述第二定位组件上;所述放料组件用于抓取所述第一定位组件和所述第二定位组件上的所述工件,并带动所述工件移动至其他设备上。
100.本实用新型操作简便,提高了检测的效率,避免了刮伤工件,且降低了检测成本。
101.以下将结合附图对本实用新型的一些实施方式作详细说明。
102.请参阅图1,本实用新型实施例提供一种供料装置100,用于取放工件40,并二次定位及翻转工件40,完成检测前的上料作业以及检测后的下料作业。供料装置100包括取放料机构10和定位翻转机构20。工件40大致为片状,取放料机构10包括上料组件11和放料组件
15,上料组件11用于抓取位于上料位的工件40并带动工件40移动至定位翻转机构20;定位翻转机构20用于二次定位工件40并带动工件40翻转,实现工件40上料;放料组件15用于抓取定位翻转机构20上的工件40并带动工件40移动至检测装置50上,及将经检测装置50检测后的工件40移走,实现工件40下料。
103.定位翻转机构20包括第一定位组件22、第二定位组件23、移动组件24以及两个相对设置的翻转组件25。第一定位组件22和第二定位组件23设于两个翻转组件25之间,第一定位组件22和第二定位组件23分别用于二次定位工件40。翻转组件25用于吸附经第一定位组件22或第二定位组件23定位的工件40,并带动工件40翻转。移动组件24滑动连接于第二定位组件23,用于带动第二定位组件23靠近或远离第一定位组件22运动,以调节第一定位组件22和第二定位组件23之间的距离。当移动组件24带动第二定位组件23靠近第一定位组件22运动时,便于上料组件11抓取工件40放置至第二定位组件23上;当移动组件24带动第二定位组件23远离第一定位组件22运动时,使第二定位组件23靠近一翻转组件25,便于翻转组件25吸附第二定位组件23上的工件40。
104.上述的供料装置100工作方式为:将工件40放置于上料位,通过移动组件24带动第二定位组件23靠近第一定位组件22移动。上料组件11抓取位于上料位的工件40并分别将工件40移动至第一定位组件22和第二定位组件23上,以使第一定位组件22和第二定位组件23二次定位工件40,通过移动组件24带动第二定位组件23远离第一定位组件22移动,以使第二定位组件23靠近一翻转组件25,两个翻转组件25同时吸附经第一定位组件22和第二定位组件23二次定位后的工件40,并带动工件40翻转,使工件40的内腔朝上。通过放料组件15将经两个翻转组件25翻转后的工件40移至检测装置50处进行检测,实现工件40上料作业。待检测装置50检测后,通过放料组件15将检测后的工件40抓取至下料位,实现工件40下料作业。
105.请参阅图2,上料组件11包括上料机器人12、上料手爪13、料框14及承载料框14的支座18,料框14大致为长方体状,料框14包括多个储料位,用于存放工件40。上料手爪13连接上料机器人12,上料机器人12用于驱动上料手爪13在料框14及定位翻转机构20之间移动,上料手爪13用于取放工件40。上料机器人12包括第一驱动臂121、第二驱动臂122和第一转盘123,第一驱动臂121可转动地连接于上料手爪13,以调整上料手爪13的位置,第二驱动臂122可转动地连接于第一驱动臂121,以调整第一驱动臂121的位置,从而调整上料手爪13的位置,第一转盘123可旋转地连接于第二驱动臂122,以调整第二驱动臂122的角度,从而调整第一驱动臂121的角度,进而调整上料手爪13的角度,以使上料手爪13准确取放工件40。
106.来料时,直接将采用料框14装载工件40,无需人工转框。通过上料机器人12上料手爪13从料框14内依次吸取工件40,并将工件40依次放置于定位翻转机构20上,通过上料机器人12及上料手爪13代替人工完成二次定位前的上料作业。
107.请参阅图3,上料手爪13包括连接臂131、取料板132、相机模块133、吸板134及第二吸附件135。连接臂131大致为圆柱状,取料板132和吸板134大致为片状,连接臂131的一端连接上料机器人12,连接臂131的另一端连接取料板132。取料板132的一侧设有相机模块133,且相机模块133的一端设置有光源136,取料板132的另一侧连接有吸板134,第二吸附件135设置在吸板134背离取料板132的一侧。吸板134的宽度范围小于放置于料框14内前后
相邻的两个工件40之间的间距,便于使吸板134通过第二吸附件135从料框14内取出工件40。通过相机模块133采集料框14内工件的位置图像,并驱动上料机器人12带动连接臂131移动,从而带动吸板134移动至相应的储料位,通过第二吸附件135吸附工件40以取出工件40。在本实施例中,相机模块133为ccd工业相机,第二吸附件135为吸盘。
108.请参阅图4,定位翻转机构20还包括安装件21,安装件21设于支座18一侧,第一定位组件22和移动组件24分别连接安装件21。
109.进一步的,第一定位组件22和第二定位组件23分别包括定位平台231、固定定位件232及滑动定位件233,定位平台231大致为长方体状,固定定位件232和滑动定位件233大致为圆柱状。第一定位组件22的定位平台231固定连接安装件21,第二定位组件23的定位平台231滑动连接移动组件24,分别用于放置工件40。定位平台231包括第一侧、第二侧、第三侧及第四侧,定位平台231的第一侧和第二侧分别设有固定定位件232,第一侧垂直于第二侧,定位平台231的第三侧和第四侧分别滑动设有滑动定位件233,第三侧垂直于第一侧,第四侧垂直于第三侧,固定定位件232和滑动定位件233用于内撑定位工件40,从而固定工件40。
110.在一些实施例中,定位翻转机构20还包括限位件26,限位件26呈t型,限位件26设置于安装件21邻近第二定位组件23的位置,用于限定第二定位组件23的移动距离。
111.请同时参阅图5,第一定位组件22和第二定位组件23还分别包括两个相垂直设置在定位平台231背面的定位驱动件234,滑动定位件233滑动贯穿于定位平台231的两个相对的侧面,并与相应的定位驱动件234连接,定位驱动件234用于驱动滑动定位件233靠近或远离固定定位件232移动,以内撑或松开工件40。当内撑定位工件时,一定位驱动件234驱动位于第四侧的滑动定位件233远离位于第一侧的固定定位件232移动,从而内撑工件40的一侧,另一定位驱动件234再驱动位于第三侧的滑动定位件233远离位于第二侧的固定定位件232移动,从而内撑工件40的另一侧。在本实施例中,定位驱动件234为气缸。通过气缸驱动滑动定位件233移动,以内撑工件40的内侧壁进行定位,避免接触产品外观面。
112.移动组件24包括移动件241、移动滑轨242及移动驱动件243。移动件241大致为长方体状,移动件241连接于第二定位组件23。移动滑轨242沿第二定位组件23的移动方向延伸,移动件241可滑动地连接于移动滑轨242。移动驱动件243为横杆气缸,移动驱动件243连接于移动件241,移动驱动件243用于驱动移动件241靠近或远离第一定位组件22移动,从而带动第二定位组件23靠近或远离第一定位组件22运动。在一些实施例中,移动滑轨242还可以为丝杠、电动滑台等,能够带动第二定位组件23靠近或远离第一定位组件22运动即可。
113.进一步的,请参阅图4和图5,两个翻转组件25对称设于安装件21的两侧。每个翻转组件25分别包括支撑架251、翻转臂252、第一驱动件253和第一吸附件254。支撑架251呈l型,支撑架251的一端连接支架18,支撑架251的另一端安装有第一驱动件253,第一驱动件253包括相连接的翻转气缸258和转盘259,翻转气缸259固定设置于支撑架251远离安装件21的一端,用于带动转盘259转动。翻转臂252呈l型,翻转臂252的一端连接于转盘259,翻转臂252的另一端连接有第一吸附件254,第一吸附件254用于吸附工件40,翻转气缸258用于驱动转盘259转动,从而带动翻转臂252转动,进而使翻转臂252带动第一吸附件254翻转,从而实现定位后的工件40的翻转,使工件40的内腔朝上,等待上料。
114.其中,第一吸附件254包括第一转动部255和第一吸附部256,多个转动部255转动连接翻转臂252远离第一驱动件253的一端,每个第一转动部255设置有第一滑槽257,第一
吸附部256滑动设置于第一滑槽257内,可滑动调节第一吸附部256在第一滑槽257内位置,适用于不同尺寸的工件40吸附。
115.请参阅图6,放料组件15包括放料机器人16及连接放料机器人16的放料模组17,放料机器人16用于驱动放料模组17在定位翻转机构20及检测装置50之间移动,放料模组17用于取放工件40。放料机器人16包括第三驱动臂161、第四驱动臂162和第二转盘163,第三驱动臂161可转动地连接于放料模组17,以调整放料模组17的位置,第四驱动臂162可转动地连接于第三驱动臂161,以调整第三驱动臂161的位置,从而调整放料模组17的位置,第二转盘163可旋转地连接于第四驱动臂162,以调整第四驱动臂162的角度,从而调整第三驱动臂161的角度,进而调整放料模组17的角度,以使放料模组17准确取放工件40。
116.请参阅图7,放料模组17包括横向连接杆171、纵向连接杆175、第二转动部172和第二吸附部173,横向连接杆171的两端分别连接有纵向连接杆175,纵向连接杆175的两端分别滑动连接有多个第二转动部172,每个第二转动部172远离纵向连接杆175的一端连接有第二吸附部173,每个第二转动部172设置有第二滑槽174,每个第二转动部172通过第二滑槽174与纵向连接杆175滑动连接,以调整第二吸附部173的位置,以适应工件40的尺寸,实现对工件40稳定抓取。
117.请参阅图8,在一些实施例中,供料装置100进一步包括收料机构30和废料台60,收料机构30用于存放检测合格的工件40,废料台60用于存放检测不合格的工件40。
118.请参阅图9,收料机构30包括料盘移动夹爪31、第二驱动件32及两个相对设置的升降模组33,升降模组33用于放置料盘34,并带动料盘34上下移动;料盘移动夹爪31连接于第二驱动件32,第二驱动件32用于带动料盘移动夹爪31在两个升降模组33之间移动,料盘移动夹爪31用于抓取料盘34。使用时,先在一个升降模组33上放置一个料盘34,当该料盘34上放满工件40后,通过第二驱动件32带动料盘移动夹爪31抓取该料盘34移动至另一升降模组33上,并将该料盘34放置在另一升降模组33上,另一升降模组33带动料盘34下降一定距离,便于堆叠放置料盘34,重复上述操作,实现将放满工件后的料盘34整齐存放。
119.其中,第二驱动件32包括收料滑轨321和移动部322,收料滑轨321沿第二驱动件32移动方向延伸,移动部322滑动连接于收料滑轨321,移动部322连接于料盘移动夹爪31,用于带动料盘移动夹爪31在两个升降模组33之间移动。
120.其中,升降模组33包括收料平台331、收料支撑部332及升降滑轨333,收料平台331大致为长方体状,用于承载料盘34,收料支撑部332设有升降滑轨333,升降滑轨334沿收料平台331的移动方向延伸,收料平台331可滑动地连接于升降滑轨333,升降滑轨333用于带动收料平台331上升或下降,以堆叠料盘34。
121.请参阅图10,料盘移动夹爪31包括连接板311、夹料板312及夹料驱动部313,连接板311呈u型,连接板311的一侧连接于移动部322,移动部322可带动连接板311移动。连接板311的两端分别连接有夹料板312,夹料板312大致为片状,夹料板312连接于夹料驱动部313,夹料驱动部313可驱动两个相对设置的夹料板312相互靠近或者远离,从而夹取或释放料盘34。
122.本实用新型上述实施例提出的供料装置100的工作过程为:
123.来料时,直接将采用料框14装载工件40。通过上料组件11中相机模块133采集料框14内工件的位置图像,驱动上料机器人12带动连接臂131移动,从而带动吸板134移动至料
框14,通过第二吸附件135从料框14内吸附工件40并将工件40移动至定位翻转机构20的第一定位组件22和第二定位组件23上。
124.通过定位翻转机构20中第一定位组件22和第二定位组件23内撑定位工件40,通过移动组件24驱动第二定位组件23远离第一定位组件22运动,以使第二定位组件23靠近一翻转组件25。通过翻转组件25中第一吸附件254吸附工件40,通过翻转气缸258带动转盘259旋转,以带动工件40翻转,使工件40的内腔朝上,等待上料。
125.通过放料组件15中放料模组17吸附已翻转的工件40,放料机器人16带动放料模组17移至检测装置50进行检测。待工件40检测完成后,通过放料模组17吸附已检测的工件40,通过放料机器人16带动放料模组17移至收料机构30中料盘34上方,并将工件40放置于料盘34上,使料盘34收集工件40。
126.当收料机构30中一升降模组33上的料盘34装满工件时,通过料盘移动夹爪31抓取该料盘34,并通过第二驱动件32带动料盘移动夹爪31移动至另一升降模组33的上方,并将该料盘34放置于另一升降模组33上,另一升降模组33带动该满载的料盘34下降,以自动堆叠满载的料盘34,供人工收取满载的料盘34。
127.上述供料装置100通过上料组件11取料,并将工件40移至第一定位组件22或第二定位组件23固定定位,移动组件24驱动第二定位组件23靠近或远离第一定位组件22运动以使工件40固定定位,翻转组件23吸附第一定位组件22或第二定位组件23上固定的工件40,且带动工件40翻转,放料组件15将已翻转的工件40移至检测装置50处进行检测。本实用新型操作简便,提高了检测的效率,避免了刮伤工件,并且可降低检测成本。
128.另外,本领域技术人员还可在本实用新型精神内做其它变化,当然,这些依据本实用新型精神所做的变化,都应包含在本实用新型所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。