1.本发明涉及电机控制技术领域,尤其涉及一种直线电机控制系统及控制方法。
背景技术:
2.目前,直线电机及其驱动器的生产技术和应用技术在工业发达国家正处于发展阶段,并作为一种崭新的进给方式呈现出极大的生命力,在国外已进入工业应用阶段,但国内直线电机的研究和应用尚处于起步阶段,而三闭环(电流环,速度环,位置环)控制在工业领域以成熟应用于伺服电机,可以参考该控制方法并在直线电机上进行应用。
3.因此,有必要提供一种直线电机控制系统及控制方法以解决上述技术问题。
技术实现要素:
4.为解决上述技术问题,本发明的一种实施例提供一种直线电机控制系统,所述控制系统包括位置控制模块、速度控制模块、机电模块及传感模块;
5.所述位置控制模块连接所述速度控制模块,用于接收位置控制信号并输出速度控制信号;
6.所述速度控制模块用于接收所述速度控制信号并输出电流控制信号;
7.所述机电模块连接所述速度控制模块,包括电流控制模块、力控制模块及电机,所述电流控制模块用于接收所述电流控制信号并依据所述电流控制信号控制所述电机的位置;
8.所述传感模块连接所述位置控制模块、所述速度控制模块、所述机电模块,用于获取所述电机反馈的位置反馈信号、速度反馈信号及电流反馈信号,所述位置控制模块依据所述位置反馈信号调整输出所述速度控制信号,所述速度控制模块依据所述速度反馈信号调整输出所述电流控制信号;所述力控制模块依据所述位置反馈信号、所述电流反馈信号进行力补偿并输出电流补偿信号,所述电流控制模块依据所述电流反馈信号、所述电流补偿信号调整输出所述电流控制信号。
9.根据本发明的一种实施例,所述传感模块包括第一传感单元、第二传感单元,所述第一传感单元连接于所述位置控制模块、所述速度控制模块及所述电机,用于获取所述位置反馈信号,并依据所述位置反馈信号获取所述速度反馈信号,所述第二传感单元连接于所述电流控制模块、所述力控制模块,用于获取所述电流反馈信号。
10.根据本发明的一种实施例,所述力控制模块包括力观测单元、齿槽力单元,所述力观测单元连接所述第一传感单元、所述第二传感单元,用于依据所述电流反馈信号、所述位置反馈信号获取所述电机的电机常数,所述齿槽力单元连接所述第一传感单元,用于依据所述位置反馈信号获取所述电机的齿槽力。
11.根据本发明的一种实施例,所述力控制模块还包括力补偿单元,所述力补偿单元连接所述力观测单元、所述齿槽力单元,用于依据所述电机常数、所述齿槽力及所述电机的预设负载进行力补偿,以使所述电机的预设负载的力与所述电机的实际负载的力的差值小
于预设阈值时,输出力补偿结果。
12.根据本发明的一种实施例,所述电流控制模块包括电流控制器,所述电流控制器连接所述力控制模块,用于依据所述力补偿结果输出所述电流补偿信号。
13.根据本发明的一种实施例,所述电流控制模块包括驱动单元、电流转换单元,所述驱动单元连接所述速度控制单元,用于依据所述电流控制信号将外接电压转换为驱动所述电机的驱动电压,所述电流转换单元连接所述驱动单元及所述电机,用于依据所述电机的物理参数、所述驱动电压获取驱动电流,所述电机在所述驱动电流的驱动下依据所述电机的实际负载、所述电机的电机常数输出所述电机的位置。
14.根据本发明的一种实施例,所述机电模块还包括反电动力势模块,所述反电动力势模块连接所述电流控制模块及所述电机,用于依据所述电机的位置调整输出所述驱动电流。
15.根据本发明的一种实施例,所述位置控制模块包括位置控制器,所述速度控制模块包括速度控制器。
16.根据本发明的一种实施例,所述电流控制器、所述位置控制器、所述速度控制器均为pi控制器。
17.为解决上述技术问题,本发明的另一种实施例提供一种直线电机控制方法,所述直线电机控制方法包括:
18.位置控制器接收位置控制信号并输出速度控制信号至速度控制器,以使所述速度控制器依据所述速度控制信号输出电流控制信号,所述机电模块接收所述电流控制信号并依据所述电流控制信号控制所述机电模块的电机位置;
19.传感器获取所述电机位置的位置反馈信号、速度反馈信号及电流反馈信号,所述位置控制器依据所述位置反馈信号调整输出所述速度控制信号,所述速度控制器依据所述速度反馈信号调整输出所述电流控制信号;所述机电模块依据所述位置反馈信号、所述电流反馈信号进行力补偿并输出电流补偿信号,并依据所述电流反馈信号、所述电流补偿信号调整输出所述电流控制信号,所述机电模块依据调整的所述电流控制信号调整所述机电模块的电机位置。
20.相较于现有技术,本发明的一种直线电机控制系统及控制方法,通过所述位置控制模块依据所述位置反馈信号调整输出所述速度控制信号,所述速度控制模块依据所述速度反馈信号调整输出所述电流控制信号;所述力控制模块依据所述位置反馈信号、所述电流反馈信号进行力补偿并输出电流补偿信号,所述电流控制模块依据所述电流反馈信号、所述电流补偿信号调整输出所述电流控制信号实现所述直线电机控制系统对所述电机的精确控制。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
22.图1是本发明一实施例的直线电机控制系统的结构示意图。
23.图2是本发明一实施例的直线电机控制系统的原理示意图。
24.图3是本发明一实施例的直线电机控制系统的力控制模块原理示意图。
25.图4是本发明一实施例的直线电机控制方法的流程图。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”和“第三”等是用于区别不同对象,而非用于描述特定顺序。此外,术语“包括”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
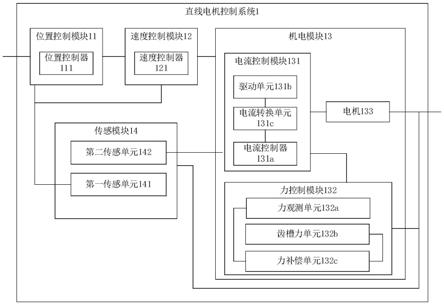
28.请一并参阅图1、图2及图3,图1是本发明一实施例的直线电机控制系统1的结构示意图,图2是本发明一实施例的直线电机控制系统1的原理示意图,图3是本发明一实施例的直线电机控制系统1的力控制模块132原理示意图。直线电机控制系统1包括位置控制模块11、速度控制模块12、机电模块13及传感模块14。
29.根据本发明的一种实施例,所述位置控制模块11包括位置控制器111,所述速度控制模块12包括速度控制器121,本实施例中,所述位置控制器111、所述速度控制器121均为pi控制器。所述位置控制模块11连接所述速度控制模块12,所述机电模块13连接所述速度控制模块12,所述位置控制模块11接收位置控制信号x*,经过所述位置控制器111输出速度控制信号v*至所述速度控制模块12,所述速度控制模块12的所述速度控制器121依据所述速度控制信号v*输出电流控制信号i*;所述机电模块14连接所述速度控制模块12,本实施例中,所述机电模块14包括电流控制模块131、力控制模块132及电机133,其中,所述电流控制模块131还包括电流控制器131a,所述电流控制器131a连接所述力控制模块132,其中,所述电流控制器也为pi控制器。所述电流控制模块131接收所述速度控制模块12输出的所述电流控制信号i*后依据所述电流控制信号i*控制所述电机133的位置x。
30.具体的,所述电流控制模块131包括驱动单元131b、电流转换单元131c,所述驱动单元131b连接所述速度控制单元12,所述驱动单元131b依据所述电流控制信号i*将外接电压v转换为驱动所述电机133的驱动电压v(s),所述电流转换单元131c连接所述驱动单元131b及所述电机133,并依据所述电机133的物理参数、所述驱动电压v(s)获取驱动电流i,本实施例中,所述电机133的物理参数包括电机相电感、电机相电阻,加载在所述电机133线圈两端的驱动电压v(s)为:
[0031][0032]
其中,i(s)为驱动电流,l为所述电机133的电机相电感,r为所述电机133的电机相电阻。
[0033]
所述电机133在所述驱动电流i(s)的驱动下依据所述电机133的实际负载f
l
、所述电机133的电机常数k输出所述电机133的位置x。
[0034]
如设kc为所述电机133的线圈电流转换的电流增益,pi控制器闭环电流环函数可表示为:
[0035][0036]i*
(s)为所述电流控制信号,i(s)为所述驱动电流,kp,ki分别为pi控制器增益,l为所述电机133的电机相电感,r为所述电机133的电机相电阻。
[0037]
当kc、k
p
远大于r时,阻力可忽略不计,式(2)可表示为:
[0038][0039]
其中,pi控制器的参数可由衰减系数λ及固有频率ωn得出,式(3)可表示为:
[0040][0041][0042]
式(3)中以所述电机常数k表示电磁力及所述驱动电流的关系,因此,所述驱动电流与所述电机133的动子位置的关系可表示为:
[0043][0044]
其中,m,b,c为二阶传递函数分母系统数。
[0045]
在另一实施例中,所述机电模块13还包括反电动力势模块134,所述反电动力势模块134连接所述电流控制模块131及所述电机133,并依据所述电机133的位置x调整输出所述驱动电流i。
[0046]
所述传感模块14连接所述位置控制模块11、所述速度控制模块12、所述机电模块13,所述传感模块14可以获取所述电机133反馈的位置反馈信号、速度反馈信号及电流反馈信号,所述位置控制模块11依据所述位置反馈信号调整输出所述速度控制信号v*,所述速度控制模块12依据所述速度反馈信号调整输出所述电流控制信号i*;所述力控制模块132依据所述位置反馈信号、所述电流反馈信号进行力补偿并输出电流补偿信号,所述电流控制模块132依据所述电流反馈信号、所述电流补偿信号调整输出所述电流控制信号i*,从而使调整所述电机133的位置x。本实施例中,所述传感模块14包括第一传感单元141、第二传感单元142,所述第一传感单元141连接于所述位置控制模块11、所述速度控制模块12及所述电机133,所述第一传感单元141可以获取所述电机133的所述位置反馈信号,并依据所述位置反馈信号获取所述速度反馈信号,并将所述位置反馈信号输出给所述位置控制模块11,及将所述速度反馈信号输出给所述速度控制模块12,所述第二传感单元142连接于所述电流控制模块131、所述力控制模块132,所述第二传感单元142可以从所述电流控制模块131输出处获取所述电流反馈信号,并将所述电流反馈信号同时输出到所述电流控制模块131及所述力控制模块132。
[0047]
所述力控制模块132包括力观测单元132a、齿槽力单元132b,所述力观测单元123a连接所述第一传感单元141、所述第二传感单元142,依据所述第一传感单元141反馈的所述位置反馈信号、及所述第二传感单元142反馈的所述电流反馈信号获取所述电机133的电机常数k,所述齿槽力单元132b连接所述第一传感单元142,依据所述第一传感单元141反馈的所述位置反馈信号获取所述电机133的齿槽力。本实施例中,所述力控制模块132还包括力补偿单元132c,所述力补偿单元132c连接所述力观测单元132a、所述齿槽力单元132b,依据所述电机常数、所述齿槽力及所述电机133的预设负载进行力补偿,以使所述电机133的预设负载的力与所述电机的实际负载的力的差值小于预设阈值时,输出力补偿结果,所述电流控制器131a并依据所述力控制模块132的所述力补偿结果输出所述电流补偿信号。具体地,
[0048]
由于力输出形变主要由局部磁场饱和及齿槽力所导致,由于磁场饱和,所述电机133的力输出与电流关系将会表现为非线性的特质。在所述电机133整个行程与运作过程中,电机常数k并不一直保持恒定,反电动势与所述电机133的速度关系也为非线性的。所述力控制模块132用来补偿所述电流控制信号i*。所述力观测单元132a为一个位置x与所述驱动电流i的函数,表示了所述电机常数k的非线性特质。所述力控制模块132整合了所述电机常数k,所述齿槽力及所述电机133的实际负载产生的力,以此反馈回所述电流控制器131a起到调整所述电流控制信号i*的作用,所述实际负载产生的力相当于所述电机133的驱动电流i与力常数的乘积,齿槽力和力输出形变可通过有限元分析法求出并由所述力控制模块132进行力补偿。当所述电机133进入稳定工作状态时,式(6)可表示为:
[0049][0050]
其中,k1是电机电流变化率对电机出力的干扰系数,k2为电机力常数,即电机出力与电机电流之比,s为拉普拉氏算子。为求得k1,k2,实际测量所述实际负载产生的力输出将有限元分析法的结果及理论计算进行结合,所述实际负载产生的力,所述齿槽力及所述力形变可通过有限元分析法估算出。其估算的误差可被视为所述电机133的参数定义中的误差。电机常数k可由下式(8)定义:
[0051]
a(z-1
)x(t)=b(z-1
)i(t) ε(t)
ꢀꢀꢀ
(8)
[0052]
其中,i(t)为驱动电路,x为所述电机的位置,式(8)可表示为离散时间形式,将ε(t)视为所述直线电机控制系统1的估算误差及其余干扰系数,其表达式为:
[0053]
a(z-1
)=1 a1z-1
a2z-2
ꢀꢀꢀ
(9)
[0054]
b(z-1
)=b0 b1z-1
ꢀꢀꢀ
(10)
[0055]
假设式(9),(10)中a
1 a
2 b
0 b1可求,所述电机133的动子质量,衰减系数b及系数c已估算出,所述电机常数k则可求出。
[0056]
其中,如下式(11),a
1 a
2 b
0 b1可由最小二乘法矩阵求出。
[0057][0058]
其中,θ=[a1,a2,b0,b1],且ε(t)为残差。θ可根据以下步骤由递归最小二乘法及遗忘因素ρ求得。
[0059]
[0060][0061][0062]
p(t)和g(t)为协方差矩阵及增益调整,ρ为一个常数值,本实施例中,ρ通常取0.95~1之间。p(t)为一个范围有限的初值矩阵,i为一个单位矩阵,所述电机133的紧急制动规则如下式:
[0063][0064]
e为预设阈值,即所述电机133的预设负载的力与所述电机的实际负载的力的差值小于预设阈值,可获得所述电机常数k,当所述电机常数k收敛时,输出力补偿结果,所述电流控制器131a并依据所述力控制模块132的所述力补偿结果输出所述电流补偿信号。
[0065]
本发明的一种直线电机控制系统1通过所述位置控制模块11依据所述位置反馈信号调整输出所述速度控制信号,所述速度控制模块12依据所述速度反馈信号调整输出所述电流控制信号;所述力控制模块132依据所述位置反馈信号、所述电流反馈信号进行力补偿并输出电流补偿信号,所述电流控制模块131依据所述电流反馈信号、所述电流补偿信号调整输出所述电流控制信号实现所述直线电机控制系统1对所述电机133的精确控制。
[0066]
进一步地,将有限元分析法的结果及理论计算进行结合可以减少理论计算的误差,同时不需要复杂的实际测量过程即可获取所述电机133的电机常数k,从而实现对所述电机133的精确控制。
[0067]
请参阅图4,图4是本发明一实施例的直线电机控制方法的流程图。所述直线电机控制方法包括:
[0068]
步骤s101:位置控制器接收位置控制信号并输出速度控制信号至速度控制器,以使所述速度控制器依据所述速度控制信号输出电流控制信号,所述机电模块接收所述电流控制信号并依据所述电流控制信号控制所述机电模块的电机位置。
[0069]
具体的,步骤s101中,所述位置控制器、所述速度控制器均为pi控制器。所述位置控制器接收位置控制信号x*,输出速度控制信号v*至所述速度控制器,所述速度控制器依据所述速度控制信号v*输出电流控制信号i*;所述机电模块依据所述电流控制信号i*控制所述电机的位置x。
[0070]
本实施例中,所述机电模块的驱动单元依据所述电流控制信号i*将外接电压v转换为驱动所述电机133的驱动电压v(s),所述机电模块的电流转换单元依据所述电机133的物理参数、所述驱动电压v(s)获取驱动电流i,所述电机133在所述驱动电流i的驱动下依据所述电机133的实际负载f
l
、所述电机133的电机常数k输出所述电机133的位置x。
[0071]
步骤s102:传感器获取所述电机位置的位置反馈信号、速度反馈信号及电流反馈信号,所述位置控制器依据所述位置反馈信号调整输出所述速度控制信号,所述速度控制器依据所述速度反馈信号调整输出所述电流控制信号。
[0072]
进一步地,所述传感器可以获取所述电机反馈的位置反馈信号、速度反馈信号及电流反馈信号,所述位置控制器依据所述位置反馈信号调整输出所述速度控制信号v*,所述速度控制器依据所述速度反馈信号调整输出所述电流控制信号i*,实现位置环、速度环
控制。
[0073]
步骤s103:所述机电模块依据所述位置反馈信号、所述电流反馈信号进行力补偿并输出电流补偿信号,并依据所述电流反馈信号、所述电流补偿信号调整输出所述电流控制信号,所述机电模块依据调整的所述电流控制信号调整所述机电模块的电机位置。
[0074]
在步骤s103中,所述机电模块的力控制模块依据所述位置反馈信号、所述电流反馈信号进行力补偿并输出电流补偿信号,所述机电模块的电流控制器依据所述电流反馈信号、所述电流补偿信号调整输出所述电流控制信号i*,从而使调整所述电机的位置x。
[0075]
其中,所述力控制模块依据反馈的所述位置反馈信号、及所述电流反馈信号获取所述电机的电机常数k及所述电机133的齿槽力。本实施例中,所述力控制模块132还依据所述电机常数k、所述齿槽力及所述电机133的预设负载进行力补偿,以使所述电机133的预设负载的力与所述电机的实际负载的力的差值小于预设阈值时,可获得所述电机常数k,当所述电机常数k收敛时,输出力补偿结果,所述电流控制器并依据所述力控制模块的所述力补偿结果输出所述电流补偿信号。
[0076]
本发明的一种直线电机控制方法,所述机电模块依据所述位置反馈信号、所述电流反馈信号进行力补偿并输出电流补偿信号,并依据所述电流反馈信号、所述电流补偿信号调整输出所述电流控制信号,所述机电模块依据调整的所述电流控制信号调整所述机电模块的电机位置将三闭环(位置环、速度环、电流环)控制方法应用到直线电机上,实现对所述直线电机的精确控制。
[0077]
进一步地,通过所述机电模块的力控制模块依据所述位置反馈信号、所述电流反馈信号进行力补偿并输出电流补偿信号,所述机电模块的电流控制器依据所述电流反馈信号、所述电流补偿信号调整输出所述电流控制信号,从而使调整所述电机的位置,提高了对所述直线电机控制的精确度。
[0078]
以上所揭露的仅为本发明一种实施方式而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。