1.本发明涉及放线技术领域,具体而言,涉及一种划线设备及划线方法。
背景技术:
2.现阶段楼层放线机器人较少,一是因为楼层施工条件比较苛刻,有大量的钢筋和预留的孔洞,对现场的机器人的作业和导航要求较高;二是楼层放线的精度要求较高,墙、梁、柱边的放线精度要求是
±
3mm,大部分的测量设备都无法满足要求;而目前比较前沿的技术方案是采用机器人bim放样的方法,通过在前期设计bim地图并标记放样点,后期将数据导入放样机器人(全站仪),并通过投点的方式标记放样点,其精度较高,但是因为其生产成本高,且对工人的专业能力也有一定要求,所以普及率不高。
技术实现要素:
3.本发明实施例的目的在于提供一种划线设备及划线方法,以解决上述问题。本发明实施例通过以下技术方案来实现上述目的。
4.第一方面,本发明实施例提供一种划线设备,包括定位组件和移动主机,定位组件包括基准板和固定安装在基准板的至少一个激光发射器,至少一个激光发射器用于发射激光导航线;移动主机包括拉绳、拉绳位移传感器、划线组件和控制器,拉绳连接于移动主机和基准板,拉绳位移传感器用于检测移动主机移动的距离,当移动主机沿激光导航线移动至预设距离时,控制器控制划线组件做出划线记号。
5.在一种实施方式中,移动主机还包括与控制器数据连接的存储器,存储器用于存储放线位置数据,拉绳位移传感器和划线组件均与控制器信号连接,当预设距离对应于放线位置数据时,控制器控制划线组件在楼板上做出划线记号。存储器存储放线位置数据。
6.在一种实施方式中,划线设备具有整机状态和放线状态,在整机状态时,定位组件安装于移动主机;在放线状态时,定位组件与移动主机分离,拉绳从拉绳位移传感器拉出,并且拉绳的方向平行于激光导航线。划线设备具有整机状态和放线状态。
7.在一种实施方式中,移动主机还包括主机框架和行走机构,主机框架开设收容空间,行走机构安装于主机框架的底部,拉绳位移传感器、划线组件和控制器均收容于收容空间。移动主机的结构。
8.在一种实施方式中,行走机构包括第一滚轮组和第二滚轮组,第一滚轮组和第二滚轮组彼此间隔;定位组件安装于移动主机时,基准板收容于第一滚轮组和第二滚轮组之间。行走机构的结构。
9.在一种实施方式中,划线组件包括储墨盒、动力泵和喷嘴,储墨盒连接于动力泵和喷嘴之间,动力泵与控制器信号连接,用于在控制器的控制下将储墨盒中的墨水从喷嘴喷出。划线组件的结构及划线过程。
10.第二方面,本发明实施例提供一种划线方法,包括步骤:控制所述激光发射器发射垂直于所述主控线的激光导航线,所述激光发射器安装在基准板上,所述基准板安装在待
划线区域的主控线上;控制移动主机沿激光导航线移动,移动主机包括拉绳、拉绳位移传感器、划线组件和控制器,所述拉绳连接于所述拉绳位移传感器和所述基准板之间;当拉绳位移传感器检测到移动主机沿激光导航线移动预定距离时,控制器控制划线组件做出划线记号。
11.在一种实施方式中,在控制器控制划线组件做出划线记号之前,划线方法还包括:获取与输入信息对应的放线位置数据;当拉绳位移传感器检测到移动主机沿所述激光导航线移动预定距离时,所述控制器控制划线组件做出划线记号包括:将放线位置数据与拉绳位移传感器检测到移动主机沿激光导航线移动的距离进行实时比较;及当放线位置数据对应于预定距离时,控制器控制划线组件做出划线记号。
12.在一种实施方式中,放线位置数据包括第一数据、第二数据和第三数据,控制器控制划线组件做出划线记号包括:拉绳位移传感器检测到移动主机沿激光导航线移动的距离对应于第一数据时,控制器控制划线组件做出第一划线记号;拉绳位移传感器检测到移动主机沿激光导航线移动的距离对应于第二数据时,控制器控制划线组件做出第二划线记号;及拉绳位移传感器检测到移动主机沿激光导航线移动的距离对应于第三数据时,控制划线组件做出第三划线记号;其中第二划线记号位于第一划线记号和第三划线记号之间。
13.在一种实施方式中,在划线组件做出划线记号后,划线方法还包括步骤:使移动主机返回主控线;使基准板、至少一个激光发射器和移动主机沿着主控线移动预定路程;使基准板再次对准主控线,固定安装在基准板上的至少一个激光发射器根据主控线发射出激光导航线;使移动主机沿激光导航线移动,当拉绳位移传感器检测到移动主机沿激光导航线移动预定距离时,控制划线组件做出另一划线记号;及根据两个划线记号划出标记边线。
14.相较于现有技术,本发明提供的划线设备包括拉线位移传感器,并且当移动主机移动至预设距离时,控制器控制划线组件做出划线记号,在保证放线精度的基础上,提高了放线效率,降低了操作难度。
15.本发明的这些方面或其他方面在以下实施例的描述中会更加简明易懂。
附图说明
16.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
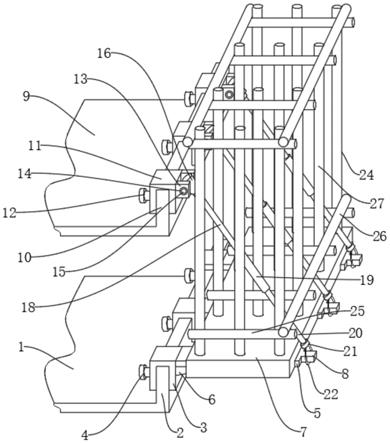
17.图1是本发明实施例提供的划线设备在整机状态下的结构示意图。
18.图2是本发明实施例提供的划线设备在放线状态下的结构示意图。
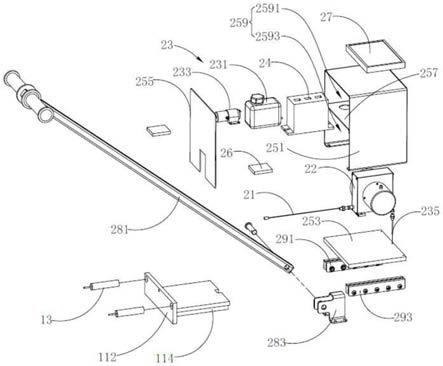
19.图3是本发明实施例提供的划线设备的拆分示意图。
20.图4是本发明实施例提供的划线方法的流程图。
21.图5是本发明实施例提供的楼层放线的平面示意图。
22.图6是本发明实施例提供的计算机自动生成的数据组列表。
23.图7是本发明实施例提供的数据组04的放线简化示意图。
24.其中,上述附图说明包括以下附图标记:
25.划线设备1、定位组件10、基准板11、安装部112、配合部114、激光发射器13、移动主
机20、拉绳21、拉绳位移传感器22、划线组件23、储墨盒231、动力泵233、喷嘴235、控制器24、主机框架25、主机外框251、底板253、后盖板255、隔板257、收容空间259、第一安装腔2591、第二安装腔2593、存储器26、数据输入装置27、把手组件28、把手281、把手座283、行走机构29、第一滚轮组291、第二滚轮组293
具体实施方式
26.为了便于理解本发明实施例,下面将参照相关附图对本发明实施例进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
27.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明实施例中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。
28.请参阅图1、图2和图3,本发明实施例提供一种划线设备1,包括定位组件10和移动主机20,定位组件10包括基准板11和固定安装在基准板11的至少一个激光发射器13,至少一个激光发射器13用于发射激光导航线;移动主机20包括拉绳21、拉绳位移传感器22、划线组件23和控制器24,拉绳21连接于移动主机和基准板11,拉绳位移传感器22用于检测移动主机20移动的距离,当移动主机20沿激光导航线移动至预设距离时,控制器24控制划线组件23做出划线记号。
29.在本实施例中,本发明提供的划线设备1用于楼板放线。在其他实施方式中,划线设备1还可以运用在其他需要高精度放线或者标记的场合,比如车库,道路划线等。具体地,划线设备1具有整机状态和放线状态。其中,整机状态对应于划线设备1的非工作状态,而放线状态对应于划线设备1的工作状态。如图1所示,在整机状态时,定位组件10安装于移动主机20;如图2所示,在放线状态时,定位组件10与移动主机20分离,此时拉绳21从拉绳位移传感器22拉出,并且拉绳21的方向平行于激光导航线,拉绳位移传感器22则用于检测拉绳21的长度。
30.在本实施例中,基准板11为基准重块,可以用于确定移动主机20移动的基准线(主控线)。具体地,先确定主控线,然后将基准板11对齐基准线,并推动移动主机20沿垂直于基准线的方向移动,然后在预设位置做出划线记号,放线效率高,操作简单方便,降低了对作业人员的素质要求。
31.基准板11包括安装部112和配合部114,安装部112和配合部114均为矩形板状结构;安装部112安装于配合部114的一端,可以用于安装至少一个激光发射器13,配合部114可以选择性地与移动主机20配合或者分离。当划线设备1处于整机状态,配合部114嵌入移动主机20,且安装部112与移动主机20配合接触;当划线设备1处于放线状态,配合部114及安装部112均与移动主机20分离,且配合部114与移动主机20之间通过拉绳21连接。
32.请继续参阅图3,至少一个激光发射器13安装于安装部112远离配合部114的一侧。在本实施例中,至少一个激光发射器13包括两个激光发射器13,两个激光发射器13沿安装部112的长度方向间隔设置。工作时,两个一字激光将在楼面上投射出两条平行光线。在其他实施方式中,激光发射器13的数量还可以是一个、三个、四个或者更多个,且激光发射器
13可以按照其他形式设置于安装部112。在本实施例中,激光发射器13可以是一字激光,可以用于发射红激光、蓝激光或者绿激光的其中一种,以作为激光导航线,其中,激光导航线垂直于基准线。在其他实施方式中,可以激光发射器13还可以是其他形状的激光器。
33.移动主机20沿激光导航线移动。由于激光的方向性好,因此基本沿直线传播,移动主机20沿激光导航线移动可以保证移动主机20基本沿直线移动,从而可以保证划线记号的标记精度。
34.请参阅图1和图3,移动主机20还包括主机框架25,当划线设备1处于整机状态,主机框架25与定位组件10配合,即定位组件10的配合部114嵌入主机框架25内。当划线设备1处于整机状态,主机框架25与定位组件10分离。主机框架25开设收容空间259,收容空间259可以用于收容拉绳位移传感器22和划线组件23等部件。
35.主机框架25包括主机外框251、底板253、后盖板255和隔板257。主机外框251开设收容空间259;底板253与后盖板255彼此邻接且均安装于主机外框251;隔板257可以平行于底板253,隔板257安装于收容空间259内并将收容空间259分隔成第一安装腔2591和第二安装腔2593,在本实施例中,第一安装腔2591位于上层,可以用于收容划线组件23;第二安装腔2593位于下层,可以用于收容拉绳21以及拉绳位移传感器22。后盖板255与主机外框251配合,以封闭收容腔,减少外界环境,例如水汽、灰尘等对拉绳位移传感器22以及划线组件23等部件的影响;在本实施例中,后盖板255可以在划线设备1处于整机状态时与定位组件10配合接触。
36.在本实施例中,拉绳21可以是钢丝绳,可以缠绕设置于收容空间259内,并且拉绳21的一端连接于拉绳位移传感器22,另一端连接于基准板11,拉绳21在划线设备1处于划线状态时的长度增加,并且拉绳21的方向平行于激光导航线。在其他实施方式中,拉绳21还可以由可伸缩的弹性材料制成,例如橡皮筋等。在本实施例中,拉绳21与地面具有一定距离,因此即使地面不平,也不会影响拉绳21的伸缩,使得拉绳位移传感器22的测量精度受外界影响较小,从而对划线设备1的的放线精度影响较小,本发明提供的划线设备1也可以适应地面不平的状况。拉绳21的长度需要满足放线需求,作为一种示例,在楼层放线环境下,拉绳21的长度可以实现距离最远为八米的放线点标记。
37.拉绳位移传感器22收容于收容空间259,并与控制器24信号连接。更具体地,拉绳位移传感器22安装于第二安装腔2593内。拉绳位移传感器22通过检测拉绳21的长度来确定移动主机20移动的距离,即拉绳21的长度等于移动主机20移动的距离。本实施例中的拉绳位移传感器22的精度高,保证了较高的放线精度,放线精度可达
±
3mm。作为一种示例,拉绳位移传感器22的重复精度在0.02%fs(full-scale,满量程)~0.01%fs之间,且八米的最大误差为1.6mm,符合楼层放线的国家标准。
38.请继续参阅图3,划线组件23也收容于收容空间259,并与控制器24信号连接,更具体地,划线组件23安装于第一安装腔2591内。划线组件23包括储墨盒231、动力泵233和喷嘴235。储墨盒231连接于动力泵233和喷嘴231之间,即储墨盒231和动力泵233及喷嘴231均连通,储墨盒231用于存储墨水,喷嘴235穿设于底板253,可以用于墨水的流出。动力泵233用于提供将墨水输出的动力,在本实施例中,动力泵233与控制器24信号连接,用于在控制器24的控制下将储墨盒231中的墨水从喷嘴235喷出。
39.移动主机20还包括存储器26和数据输入装置27,存储器26与控制器24数据连接,
可以用于存储放线位置数据。存储器26可以与数据输入电性连接,在本实施例中,存储器26可以是u盘,在其他实施方式中,存储器26还可以是具有存储功能的其他器件。数据输入装置27安装于主机外框251与底板253相对的一侧,即主机外框251的顶部。数据输入装置27可以是触摸屏。通过触摸屏输入放线位置数据,并通过存储器26对放线位置数据进行存储。通过采用数据输入装置27导入放线位置数据,在推动移动主机20沿激光导航线移动过程中,只要移动主机20到达预设距离(放线位置数据中的放线位置)时便自动喷点,能准确标记符合标准的放线点,避免了放线作业时需要记忆上百个数据点的困难,降低了放线难度,提高了放线效率,降低了对作业人员的素质要求。本实施例中的存储器26可以存储的标记点数不限,并且可以保存多个历史数据。当然放线位置数据也可以通过通讯模块实时获取。
40.控制器24可以收容于第一安装腔2591内,控制器24与拉绳位移传感器22以及划线组件23均信号连接,当移动主机20沿激光导航线移动的预设距离对应于放线位置数据对应时,控制器24控制划线组件23在楼板上做出划线记号
41.移动主机20还包括把手组件28,把手组件28包括把手281和把手座283,把手281可以用于用户的抓取,以使作业员可以通过把手281推动移动主机20移动,并避开钢筋和楼层预留的孔洞,灵活性更好。把手组件28可以用于把手281的安装。把手座283固定安装于底板253,其中,可以通过粘接、焊接、螺钉固定或者其他固定方式,把手281铰接于把手座283,具体地,把手281通过铰链销铰接于把手座283。
42.移动主机20还包括行走机构29,行走机构29安装于主机框架25的底部,具体地,行走机构29安装于底板253远离主机外框251的一侧,可以用于移动主机20的移动。在本实施例中,行走机构29包括第一滚轮组291和第二滚轮组293,第一滚轮组291和第二滚轮组293彼此间隔,均可以包括多个滚轮。第一滚轮组291和第二滚轮组293在划线设备1处于放线状态时,带动主机框架25与定位组件10分离。在划线设备1处于整机状态时,即定位组件10安装于移动主机20时,第一滚轮组291和第二滚轮组293之间可以用于收容基准板11。
43.综上,本发明提供的划线设备1包括拉线位移传感器,并且当移动主机20移动至预设距离时,控制器24控制划线组件23做出划线记号,在保证放线精度的基础上,提高了放线效率,降低了操作难度。并且本发明的划线设备1体积较小,操作灵活性更高,减少了施工环境对放线作业的影响。
44.请参阅图4,本发明实施例提供一种划线方法,包括步骤:
45.s1:设置主控线;
46.具体地,可以通过全站仪或经纬仪描点,根据描点用墨斗弹出主控线。主控线可以通过反复校核,来提供标定精度,作为一种示例,主控线可以作为墙、柱定位边线和临边线的放线的参考基准。
47.请参阅图5在本实施例中,x1、x2、y1、y2、y3为楼层放线的主控线,可以通过全站仪或经纬仪描点,并且根据描点用墨斗弹出。为保证直线度,每次弹线长度不能超过6米。
48.s2:激光发射器13发射垂直于主控线的激光导航线,激光发射器13安装在基准板11上,基准板安装在待划线区域的主控线上;
49.将划线设备1的基准板11安装在主控线上,使得拉绳21一端的起始点位于主控线上,并且控制至少一个激光发射器13发出激光导航线,以使激光导航线与主控线垂直,可以推动移动主机20沿激光导航线的延伸方向移动。主控线可以通过人工标定,待划线区域可
以为楼板。
50.s3:控制移动主机20沿激光导航线移动;
51.在本实施例中,可以是操作员推动移动主机20沿激光导航线移动;在其他实施方式中,还可以是通过舵轮或者借助导航设备带动移动主机20沿激光导航线移动。
52.s4:当拉绳位移传感器22检测到移动主机20沿激光导航线移动预定距离时,控制器24控制划线组件23做出划线记号。
53.在本实施例中,在控制器24控制划线组件23做出划线记号之前,划线方法还包括:接收输入信息;及从存储器24获取与输入信息对应的放线位置数据;当拉绳位移传感器22检测到移动主机20沿激光导航线移动预定距离时,控制器24控制划线组件23做出划线记号包括:将放线位置数据与拉绳位移传感器22检测到移动主机20沿激光导航线移动的距离进行实时比较;及当放线位置数据对应于预定距离时,控制器24控制划线组件做出划线记号。
54.具体地,放线位置数据包括第一数据、第二数据和第三数据。每组数据至少有两个位置点,与主控线的距离可作为一组数据,每组数据可在工程图纸定义线条属性后,由计算机自动生成,如图6所示。作为一种示例,平行临近的主控线且在两个位置点一侧的分别为墙的放线参考基准、柱定位边线的放线参考基准和临边线的放线参考基准。数据组需配合楼板放线的示意图使用,可以直接通过输入设备导入划线设备1,由于数据组直接导入划线设备1,所以无需人工记忆,操作难度小。
55.控制器24控制划线组件23做出划线记号包括:拉绳位移传感器22检测到移动主机20沿激光导航线移动的距离对应于第一数据时,控制器24控制划线组件23做出第一划线记号;拉绳位移传感器22检测到移动主机20沿激光导航线移动的距离对应于第二数据时,控制器24控制划线组件23做出第二划线记号;及拉绳位移传感器22检测到移动主机20沿激光导航线移动的距离对应于第三数据时,控制器24控制划线组件23做出第三划线记号;其中第二划线记号位于第一划线记号和第三划线记号之间。在本实施例中,第一划线记号可以是a1(a2),第二划线记号可以是b1(b2),第三划线记号可以是c1(c2)。
56.在划线组件23做出划线记号后,划线方法还包括步骤:
57.使移动主机20返回主控线;使基准板11、至少一个激光发射器13和移动主机29沿着主控线移动预定路程,其中,移动方式可以是手动推动移动主机20移动;使基准板11再次对准主控线,固定安装在基准板11上的至少一个激光发射器13根据主控线发射出激光导航线;使移动主机20沿激光导航线移动;当检测到移动主机20沿激光导航线移动预定距离时,控制划线组件23做出另一划线记号;及根据两个划线记号划出标记边线。
58.请参阅图5、图6和图7,以下以一个具体的示例对本发明提供的放线方法进行说明:
59.在楼层的楼板上,操作员先用全站仪和铅垂仪确定主控线的位置,并且用墨斗弹出楼板所有的主控线;
60.启动划线设备1,把u盘插入划线设备1,u盘里存储有放线楼层和放线位置数据组01-014,使用数据输入装置27选择需要放线的楼层,再选择到其中一组数据,例如数据组04。
61.查看层放线的平面示意图,根据示意图找到数据组04,确定定位组件10的放置位置,并使定位组件10的一侧对齐主控线y1,并且令投射在楼板上的两束激光导航线垂直于
主控线y1。
62.操作员以一定速度(约0.2m/s)沿着激光导航线推动移动主机20,拉绳位移传感器22实时测量移动主机20的移动距离,当到达数据组04对应的位置时,控制器24控制动力泵233将墨水从储墨盒231经喷嘴235导出,并在楼板喷出点a1、b1、c1等标记点。
63.移动主机20返回至主控线y1,划线设备1平行移动一定距离,并且把定位组件10放置在主控线y1另一位置,移动主机20沿激光导航线移动预定距离时,控制器24控制动力泵233将墨水从储墨盒231经喷嘴235导出,并在楼板喷出a2、b2、c2等标记点;
64.放线工人用墨斗的墨线连接a1-a2、b1-b2、c1-c2,就可以画出l1,l2,l3,即完成墙、柱定位边线和临边线的放线。
65.同理完成楼层放线所有数据组的放线。
66.综上,本发明提供的划线方法,通过检测到移动主机20沿激光导航线移动预定距离时,控制划线组件23做出划线记号,提高了放线效率,降低了操作难度。
67.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。