1.本公开总体上涉及交通工具方向盘,并且更具体地涉及一种具有用于接收用户输入命令的接近传感器或开关的交通工具方向盘。
背景技术:
2.机动交通工具通常配备有用户操纵的方向盘,所述用户操纵的方向盘可以包括用于控制交通工具功能的各种用户输入控制按钮。例如,巡航控制、无线电音量控制、无线电菜单选择和其他控制功能可以用各种输入按钮来输入,诸如通常位于中心部分或将方向盘的轮缘与方向盘轴互连的辐条上的按钮开关。当旋转方向盘时,也将各种输入控制按钮旋转到不同的角位置。
技术实现要素:
3.根据本公开的第一方面,提供了一种交通工具方向盘。所述交通工具方向盘包括:可旋转轮缘,所述可旋转轮缘包括芯结构;转向角传感器,所述转向角传感器感测所述轮缘的旋转角度;多个接近传感器,所述多个接近传感器位于所述轮缘上并沿着弧长彼此间隔开;以及控制器,所述控制器处理由所述多个接近传感器中的每一个产生的感测输出并基于所述感测输出确定操作员输入命令,其中所述控制器为所述接近传感器中的每一个分配功能,所述功能随着所述轮缘以一定角度旋转而改变,使得与接近传感器相关联的给定功能保持在同一空间位置处。
4.本公开的第一方面的实施例可以包括以下特征中的任一个或其组合:
[0005]-覆盖包裹物,所述覆盖包裹物围绕所述多个接近传感器和所述芯;
[0006]-显示器,所述显示器设置在由所述轮缘限定的开口内;
[0007]-所述显示器显示与所述多个接近传感器中的至少一个传感器相关联的功能标识符;
[0008]-所述多个接近传感器包括位于所述轮缘的多个侧面上的接近传感器;
[0009]-所述多个接近传感器位于所述轮缘的前侧面、后侧面、顶侧面和底侧面上;
[0010]-所述接近传感器中的每一个被配置为检测用户触摸命令和用户压力命令,并且其中所述控制器基于所述用户触摸命令和所述用户压力命令中的至少一个来控制一个或多个交通工具相关操作;
[0011]-所述接近传感器中的每一个包括第一电极、第二电极和设置在所述第一电极与所述第二电极之间的顺应性电介质层,其中所述控制器处理与所述第一电极和所述第二电极相关联的信号并选择性地以不同的接近传感器布置重新配置所述第一电极和所述第二电极的操作以提供被配置为感测触摸的第一电容传感器和被配置为感测压力的第二电容传感器;
[0012]-所述第一电极包括一对电极,所述一对电极可配置为产生互电容以提供第一电容传感器,并且还可配置为产生自电容以提供第二电容传感器;
[0013]-所述一对电极包括第一多个电容指状物和第二多个电容指状物,其中所述第一多个电容指状物与所述第二多个电容指状物叉指形交叉;并且
[0014]-所述控制器对与所述第一电容传感器、所述第二电容传感器和所述第三电容传感器中的每一者相关联的信号顺序采样。
[0015]
根据本公开的第二方面,提供了一种交通工具方向盘。所述交通工具方向盘包括:可旋转轮缘,所述可旋转轮缘包括芯结构;转向角传感器,所述转向角传感器感测所述轮缘的旋转角度;多个电容传感器,所述多个电容传感器位于所述轮缘上并沿着弧长彼此间隔开;控制器,所述控制器处理由所述多个电容传感器中的每一个产生的输出并基于所述感测输出确定操作员输入命令,其中所述控制器为所述电容传感器中的每一个分配功能,所述功能随着所述轮缘以一定角度旋转而改变,使得与电容传感器相关联的给定功能保持在同一空间位置处;以及显示器,所述显示器设置在由所述轮缘限定的开口内,其中所述显示器显示与所述多个电容传感器中的至少一个传感器相关联的功能标识符。
[0016]
本公开的第二方面的实施例可以包括以下特征中的任一个或其组合:
[0017]-覆盖包裹物,所述覆盖包裹物围绕所述多个电容传感器和所述芯;
[0018]-所述多个电容传感器包括位于所述轮缘的多个侧面上的电容传感器;
[0019]-所述多个电容传感器位于所述轮缘的前侧面、后侧面、顶侧面和底侧面上;
[0020]-所述电容传感器中的每一个被配置为检测用户触摸命令和用户压力命令,并且其中所述控制器基于所述用户触摸命令和所述用户压力命令中的至少一个来控制一个或多个交通工具相关操作;
[0021]-所述电容传感器中的每一个包括第一电极、第二电极和设置在所述第一电极与所述第二电极之间的顺应性电介质层,其中所述控制器处理与所述第一电极和所述第二电极相关联的信号并选择性地以不同的电容传感器布置重新配置所述第一电极和所述第二电极的操作以提供被配置为感测触摸的第一电容传感器和被配置为感测压力的第二电容传感器;
[0022]-所述第一电极包括一对电极,所述一对电极可配置为产生互电容以提供第一电容传感器,并且还可配置为产生自电容以提供第二电容传感器;所述一对电极包括第一多个电容指状物和第二多个电容指状物,其中所述第一多个电容指状物与所述第二多个电容指状物叉指形交叉;并且
[0023]-所述控制器对与所述第一电容传感器、所述第二电容传感器和所述第三电容传感器中的每一者相关联的信号顺序采样。
[0024]
本领域技术人员在研究以下说明书、权利要求和附图之后将理解并了解本公开的这些和其他方面、目的和特征。
附图说明
[0025]
在附图中:
[0026]
图1a是具有配备有多个用户输入件的方向盘的机动交通工具的内部的前透视图;
[0027]
图1b是被示出为由用户抓握并处于第一角位置的方向盘的前视图;
[0028]
图1c是被示出为旋转到相对于图1b所示的第一角位置的第二角位置的方向盘的前视图;
[0029]
图2是方向盘的一部分的放大的部分组装视图,其示出方向盘的各个层;
[0030]
图3是根据一个实施例的通过图1b的线iii-iii截取的方向盘的透视横截面视图,其示出位于轮缘上的接近传感器的布置;
[0031]
图4是根据一个实施例的电容式接近传感器总成的分解的上部前透视图;
[0032]
图5是图4所示的电容式接近传感器的前透视图,其中控制器被配置为以第一传感器模式对信号进行采样;
[0033]
图6是图4所示的电容式接近传感器的前透视图,其中控制器被配置为以第二传感器模式对信号进行采样;
[0034]
图7是图4所示的电容式接近传感器的前透视图,其中控制器被配置为以第三传感器模式对信号进行采样;
[0035]
图8是图4的电容式接近传感器的横截面视图,其进一步示出以第一传感器模式产生的电场;
[0036]
图9是图4的电容式接近传感器的横截面视图,其进一步示出以第二传感器模式产生的电场;
[0037]
图10是图4的电容式接近传感器的横截面视图,其进一步示出以第三传感器模式产生的电场;
[0038]
图11是示出用于对由图4的电容式接近传感器总成以第一传感器模式、第二传感器模式和第三传感器模式产生的信号进行采样和测量的例程的流程图;
[0039]
图12是示出用于基于方向盘的旋转位置来控制输入功能的例程的一个实施例的流程图;以及
[0040]
图13是示出用于基于方向盘的旋转位置来控制输入功能的例程的另一个实施例的流程图。
具体实施方式
[0041]
根据要求,本文中公开了本发明的详细实施例;但是应理解,所公开的实施例仅示例性地说明本公开,本公开可以体现为不同形式和替代形式。附图不一定是详细设计的;一些示意图可能被放大或最小化来示出功能概况。因此,本文公开的具体结构细节和功能细节不应被解释为是限制性的,而是仅解释为教导本领域技术人员以不同方式采用本公开的代表性基础。
[0042]
出于本文的描述的目的,术语“上”、“下”、“右”、“左”、“后”、“前”、“竖直”、“水平”及其派生词应与如在图1a中取向的概念相关。然而,应理解,除非明确地指明为相反,否则所述概念可呈现各种替代取向。还应当理解,附图中所示的以及以下说明书中描述的具体装置和过程仅仅是所附权利要求中限定的创造性概念的示例性实施例。因此,除非权利要求另有明确说明,否则与本文所公开的实施例相关的特定尺寸和其他物理特性不应被视为具有限制性。
[0043]
本图示的实施例主要存在于与交通工具方向盘相关的方法步骤和设备部件的组合中。因此,设备部件和方法步骤已经在适当的情况下通过附图中的常规符号表示,仅示出了与理解本公开的实施例相关的那些具体细节,以便不会被对受益于本文描述的本领域普通技术人员来说是容易明显的细节混淆了本公开。此外,说明书和附图中相同的附图标记
表示相同的元件。
[0044]
如本文所使用,术语“和/或”当用于列出两个或更多个项时表示可以单独地采用所列出的项中的任何一个,或者可以采用所列的项中的两个或更多个项的任何组合。例如,如果组合物被描述为含有组分a、b和/或c,那么组合物可以含有:仅a;仅b;仅c;a和b的组合;a和c的组合;b和c的组合;或a、b和c的组合。
[0045]
在本文件中,关系术语,诸如第一和第二、顶部和底部等,仅用于将一个实体或动作与另一个实体或动作区分开,而不一定要求或暗示此类实体或动作之间的任何实际的这种关系或顺序。术语“包括(comprises)”、“包括(comprising)”或其任何其他变型旨在涵盖非排他性包括,使得包括一系列要素的过程、方法、制品或设备不仅包括那些要素,而是可以包括未明确列出的或者此类过程、方法、制品或设备固有的其他要素。前面有“包括......一个”的要素在没有更多约束的情况下则不会排除在包括该要素的过程、方法、制品或设备中存在另外的相同要素。
[0046]
如本文所用的术语“约”意指量、大小、配方、参数和其他量及特性不是精确的且不需要是精确的,而是可根据以下需要为近似的和/或较大些或较小些:反映公差、换算系数、舍入、测量误差等以及本领域技术人员已知的其他因素。当术语“约”用于描述值或范围的端点时,本公开内容应当被理解为包括具体的值或所涉及的端点。无论本说明书中的数值或范围的端点是否叙述“约”,所述数值或范围的端点都意图包括两个实施例:一个由“约”修饰,并且一个不由“约”修饰。还应理解,范围中的每一个范围的端点在与另一个端点相关以及独立于另一个端点都是显著的。
[0047]
如本文所用的术语“基本”、“基本上”及其变型意图指明所描述的特征等于或近似等于值或描述。例如,“基本上平面的”表面意图指示平面的或近似平面的表面。另外,“基本上”意图表示两个值相等或近似相等。在一些实施例中,“基本上”可以表示值在彼此的约10%内,诸如在彼此的约5%内,或者在彼此的约2%内。
[0048]
除非相反地明确指示,否则如本文所用的术语“所述”、“一(a)”或“一(an)”意指“至少一个”,并且不应局限于“仅一个”。因此,例如,除非上下文另外明确指示,否则对“部件”的引用包括具有两个或更多个此类部件的实施例。
[0049]
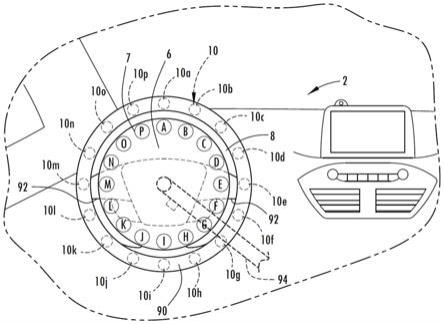
参考图1a-图3,交通工具方向盘4被总体示出为位于机动交通工具2中。交通工具方向盘4包括具有芯结构24的轮缘90和布置在轮缘90上以感测用户输入命令的多个接近传感器10a-10p。方向盘4包括控制器,所述控制器被配置为处理由多个接近传感器10a-10p中的每一个产生的输出并基于所述感测输出确定操作员输入命令,其中所述控制器为接近传感器中的每一个分配功能,所述功能随着方向盘4以一定角度旋转而改变,使得与接近传感器相关联的给定功能保持在同一空间位置处。
[0050]
参考图1a,根据一个实施例,机动交通工具2的乘客舱被总体示出为配备有方向盘4。交通工具2可以是轮式机动交通工具,其使用方向盘4以用于操纵可转向轮的方向,诸如用于轿车、卡车、货车、公共汽车、运动型多用途交通工具(suv),或用于操纵具有方向盘的其他可转向交通工具,诸如船只。交通工具2被示出为具有限定乘客舱的主体,所述乘客舱通常具有被配置为使一个或多个乘客就座的一个或多个座椅。方向盘4通常定位在驾驶员座椅的前面,以使就座的驾驶员能够用他/她的手接合和操作方向盘4,以沿顺时针方向和逆时针方向旋转方向盘4。方向盘4被总体示出为从交通工具仪表板向交通工具后方延伸,
如通常在驾驶员操纵的交通工具中所配置。方向盘4具有大致环形的轮缘90和将轮缘90与方向盘轴94互连的一个或多个辐条92或其他连接结构。方向盘轴94随着方向盘4的旋转而旋转,并且具有方向盘角度传感器96,诸如光学传感器,以感测方向盘4的旋转位置。
[0051]
方向盘4被示出为具有位于方向盘4的不同角位置处的呈电容传感器形式的多个接近传感器。根据一个示例,多个接近传感器包括沿着方向盘4的轮缘90以诸如22.5
°
的角度α等角度设置的十六个电容传感器总成10a-10p。传感器10a-10p被示出为彼此分开死区b。根据一个实施例,每个电容传感器总成10a-10p可以包括位于方向盘4的轮缘90的圆周周围的各个位置处的电容传感器,诸如在方向盘4的前侧面、后侧面、顶侧面和底侧面上。
[0052]
居中位于方向盘4的轮缘90内的是包含显示屏6的开口,所述显示屏可以定位在辐条92上或上方。显示屏6可以向乘客显示字母数字和所显示字符。显示屏6可以包括触摸屏,除了查看显示器上的输出之外,所述触摸屏还使得能够在显示器上输入用户输入。间隙8被示出为位于显示屏6与方向盘4的轮缘90之间,以使用户能够沿着方向盘4的轮缘90的内侧操纵或放置他们的手指或拇指。显示屏6可以固定到辐条92或方向盘4的其他支撑件,并且通常在方向盘4顺时针或逆时针旋转时与方向盘4同步旋转。显示屏6可以显示标记为7a-p的指示符7,其指示与每个电容传感器总成10a-10p相关联的功能。指示符a-p可以是符号、图标、字母、单词、数字或其他标记中的一者或多者的形式。
[0053]
如图1b和图1c所见,当方向盘4顺时针旋转时,轮缘90上的多个电容传感器总成10a-10p也顺时针旋转。多个接近传感器总成10a-10p中的每一个具有由控制器为其指定的功能,所述功能响应于由传感器接近度总成10a-10p中的每一个感测到的由用户命令的输入而执行。例如,示出在图1b中方向盘4的轮缘90的顶部处的传感器总成10a可以专用于诸如打开或关闭无线电的功能。功能标识符a可以作为指示符7在显示屏6上显示在接近传感器10a附近。当方向盘4的轮缘90顺时针旋转了诸如例如相对于图1b的在图1c所见的22.5
°
的方向盘角度swa时,轮缘90上的接近传感器总成10a-10p也旋转22.5
°
的角度。控制器监测用方向盘角度传感器96感测到的方向盘4的旋转的位置,并且将功能重新分配给位于与如图1b所见的同一空间位置处的另一个接近传感器总成。因而,与方向盘4上的顶部或十二点钟位置处的电容传感器总成相关联的功能保持相同,而不管方向盘4如何旋转。当方向盘4旋转了从图1b所示位置到图1c所示位置的22.5
°
的方向盘角度swa时,由功能标识符a指示的功能从图1b中的传感器总成10a改变到图1c中的传感器总成10p。分配给其余传感器总成的功能也改变。
[0054]
传感器10a-10p中的每一个可以具有分配给其的单个功能,或者可以与其他传感器组合以提供诸如由标识符15所示的多功能开关组。多功能开关组15被示出为采用具有标识符k-m的三个传感器10j-10l。开关组15被示出为从参考十二点钟位置偏移被识别为标识符spa的角度。中间传感器10k可以用于例如选择音频装置,而传感器10j和10l可以分别用于控制音量增大和减小。应当理解,可以采用任何数量的多功能开关组。
[0055]
参考图2,方向盘4的环形轮缘90的一部分被总体示出为部分组装,以便示出方向盘4的各个层。根据一些示例,方向盘4包括刚性芯24,所述刚性芯被示出为大致圆柱形的横截面形状,可以由镁或铝制成。芯24也可以被称为用于为方向盘4提供结构支撑和形状的骨架。围绕芯24的是可以由聚氨酯或泡沫制成的顺应层20。顺应层20可以具有大致圆柱形形状并且提供具有记忆的压缩性,这允许方向盘4具有柔软或缓冲感。顺应层20和芯24一起提
供方向盘4的芯结构。电容传感器10a-10p被示出为位于顺应层20之上。设置在顺应层20和电容传感器10a-10p上的是罩层30,诸如皮革罩。可以使用通过孔56施加以提供缝合图案52的缝合线54将罩层30缝合到芯结构上。
[0056]
参考图3,电容传感器10n被示出为设置在方向盘4的轮缘90的圆周周围的四个侧面上。如图所见,电容传感器10n设置在前侧面、后侧面、顶侧面和底侧面上。因而,通过使用定位在四个侧面中的每一个上的所有四个传感器,可以在方向盘4的轮缘90的前侧面、顶侧面、后侧面和底侧面上检测用户的手88。应当理解,可以检测用户的手在电容传感器中的一个或多个上的接近度或触摸,并且可以用电容传感器10a-10p来检测用户的手可能挤压并施加到其的压力。其余的电容传感器可以与传感器10n相同地配置。
[0057]
根据图4的第一实施例示出了表示传感器10a-10p中的每一者的电容式接近传感器10。接近传感器包括三个电极,所述三个电极被配置为通过使用控制器以重新配置由各种电极产生的信号的输入和输出采样以在不同的传感器配置中操作以提供可以充当互电容传感器或自电容传感器的多达三个电容传感器来以不同的传感器模式或状态操作,并且用于感测输入命令,诸如触摸、接近度和压力(力/面积)或力。
[0058]
图4所示的电容式接近传感器10中的电极的布置具有第一电容电极12和第二电容电极14,所述第一电容电极和所述第二电容电极被布置在公共层内并且经由分隔距离彼此电介质隔离。第一电极12具有第一多个传导指状物16,并且第二电极14具有第二多个传导指状物18。第一多个传导指状物16与第二多个传导指状物18叉指形交叉或交错。结果,当在以互电容模式操作时电极信号端子32和34中的一者用驱动信号驱动并且电极信号端子32和34中的另一者产生接收信号时,第一电极12和第二电极14可以在第一模式中充当互电容传感器。当电极信号端子32和34中的一者接收到驱动信号时,所述电极充当驱动电极,而另一电极充当接收电极。驱动电极可以接收在电压vi下施加的方波驱动脉冲。接收电极可以具有用于产生输出电压vo的输出。应当理解,第一电极12和第二电极14可以各种其他配置布置以用于产生电容电场作为激活场。
[0059]
在互电容传感器模式中,驱动电极被施加电压输入vi作为方波脉冲,所述方波脉冲具有足以将接收电极充电到期望电压的电荷脉冲周期。接收电极由此用作测量电极。当用户或操作员(诸如用户的手指)进入大致靠近接近传感器总成10的顶部前侧的激活电场时,接近传感器总成10检测由手指引起的对激活电场的干扰并确定所述干扰是否足以检测到足以激活接近开关或产生期望输出的触摸输入。通过处理与对应信号相关联的电荷脉冲信号来检测激活电场的干扰。
[0060]
上覆的电介质罩30设置在第一电极12和第二电极14的顶部前侧上,以提供第一电极12与第二电极14的电介质隔离以及对第一电极和第二电极的保护。电介质罩30可以包括任何电介质材料,诸如电介质聚合物或塑料、皮革、木材、装饰部件或其他电介质。应当理解,第一电极12和第二电极14可以通过以电极的期望图案印刷传导油墨来形成。根据一个实施例,油墨可以印刷在电介质罩30的后表面上,或者可以印刷在其下方的电介质层20的前表面上。第一电极12和第二电极14可以其他方式通过将预成形的传导电极放置在电介质罩30与顺应性电介质层20之间来形成。
[0061]
顺应性电介质层20设置在第一电极12和第二电极14的下方。顺应性电介质层20具有相对柔软的材料,当在罩30的前部施加压力(其是施加在区域上方的力)时,所述相对柔
软的材料是顺应性的且可变形的以便挤压第一顺应性电介质层20和使其变形。根据一个示例,顺应性电介质层20可以是柔软泡沫材料。
[0062]
第三电极26位于顺应性电介质层30的下方。根据一个实施例,第三电极26被示出为形成为传导材料片。第三电极26具有信号端子38,以允许信号与控制器进行通信。第三电极26可以在一种传感器模式中充当互电容传感器,所述互电容传感器检测施加到顶部前表面的压力,所述压力导致顺应性电介质层20变形。当顺应性电介质层20由于压力被挤压并且变形时,所述一对第一电极12和第二电极14的至少一部分(其可以短路在一起以形成单个电极或单独地操作)朝向第三电极26移动。当发生这种情况时,控制器检测所述一对第一电极12和第二电极14相对于第三电极26的相对位置。在其他传感器模式中,第三电极26可以开路以充当位于其上方的第一电极12和第二电极14或位于其下方的第三电极26的屏蔽件。根据各种实施例,当充当屏蔽件时,第三电极26可以开路,使得没有施加所施加的电压,或者可以被驱动到期望电压。
[0063]
另一底部电介质层28被示出为设置在第三电极26的下方,以便在底侧上将第三电极26电介质隔离。在一个实施例中,底部电介质层28可以是电介质背衬材料。
[0064]
参考图5-图10,示出了针对电容式接近传感器总成10的传感器之一的一个实施例的由控制器40控制的电极配置的各种操作传感器模式。如图4-图6最佳地所见,控制器40可以包括微处理器42和配置有一个或多个例程60、100的存储器44。根据一个示例,控制器40可以是具有固件的微控制单元(mcu)。应当理解,可以使用其他模拟和/或数字电路来提供控制器40。控制器40包括各种输入端/输出端,所述输入端/输出端包括连接到与第一电极12、第二电极14和第三电极26相关联的相应信号端子32、34和38的三个输入端/输出端。另外,控制器40可以基于感测的信号而产生一个或多个输出48。例如,根据各种示例,控制器40可以基于接近度感测来提供接近开关输出,使得电容式接近传感器总成10充当一个或多个电容式接近开关。
[0065]
参考图5和图8,接近传感器总成10根据第一传感器模式来配置,在所述第一传感器模式中,第一电极12和第二电极14彼此形成互电容以用作第一传感器,所述第一传感器可以用于感测在罩30的顶部前表面处或附近的用户的触摸或紧邻。在该传感器模式中,第三电极26经由控制器40开路,以便形成可以增强第一电极12与第二电极14之间的互电容的传导屏蔽件。第一电极12可以接收驱动信号x,并且第二电极14可以供应接收信号y。如图8所见,激活电场由于第一电极12和第二电极14的互电容耦合而产生(如由箭头50所示),以使得能够检测在前罩30上或上方(例如,在30毫米内)的触摸或移动(例如,扫过)。
[0066]
控制器40可以简单地通过改变输入和输出并由此重新配置感测布置以顺序地提供第一传感器、第二传感器和第三传感器来快速地在各种传感器模式之间顺序地切换电容式接近传感器总成10。参考图6和图9,电容式接近传感器总成10被示出处于第二传感器模式,在所述第二传感器模式中,第一电极12和第二电极14被电短路在一起以形成单个电极,并且第三电极26被驱动到期望电压以提供屏蔽件。为了将第一电极12和第二电极14电短路在一起,控制器40可以包括开关46,所述开关可以在固件中实施或以其他方式用模拟或数字开关来实施。在该传感器模式中,短路在一起的第一电极12和第二电极14接收自电容输入以产生由箭头50所示的激活电场,以形成如图9所见的第二自电容传感器,其中激活电信号可以检测顶部前罩30上方处于延长距离(例如,高达30厘米的距离)处的对象。自电容器
输入可以施加电压持续周期的一半以对电极充电,并且可以在周期的另一半期间感测电容。
[0067]
参考图7和图10,电容式接近传感器总成10被示出为处于第三传感器模式,在所述第三传感器模式中,第一电极12和第二电极14经由通过控制器40控制的开关46被电短路在一起并且接收驱动信号x,并且第三电极26供应接收信号y。应当理解,短路的第一电极12和第二电极14可以接收驱动信号x以与第三电极26形成互电容来提供第三传感器。因而,由于第一顺应性电介质层20的压缩而引起的短路在一起的第一电极12和第二电极14相对于第三电极的移动可以被检测为对施加到罩层5上的罩30的前表面的力或压力的量的指示。在短路的第一电极12和第二电极14与第三电极26之间的激活电场由图10中的箭头50示出。
[0068]
因此,应当理解,控制器40可以如图6-图10所示在第一传感器模式、第二传感器模式和第三传感器模式之间快节奏地顺序地切换,以便在被称为第一传感器、第二传感器和第三传感器的各种传感器配置中顺序地配置电容式接近传感器总成10,并且对感测到的信号进行采样以在每个传感器模式中感测所感测到的状况。这可以通过控制器40在各种输入与输出之间切换驱动信号x和接收信号y并且在诸如20毫秒之类的短时间段内对信号进行采样、然后顺序地切换到下一个传感器模式来实现。因而,可以利用电容式接近传感器10a-10p来实现多个传感器。可以将传感器信号与阈值进行比较以充当开关来触发输出响应。与每个传感器模式中的一个或多个相关联的传感器功能可以用于检测每个接近传感器总成的用户输入。
[0069]
参考图11,示出了根据一个实施例的用于控制所述控制器40以在各种操作模式中顺序地切换电容式接近传感器10的例程60。例程60被示出为用于以传感器模式1-3中的每一者操作根据第一实施例的电容式接近传感器总成10。应当理解,例程60可以由控制器40中的微处理器42执行,并且例程60可以存储在存储器44中。根据一个示例,例程60可以对数据进行采样并且以各种模式以约20毫秒的采样速率重新配置电容式接近传感器总成10。应当理解,可以采用其他采样速率。
[0070]
程序60在步骤62处开始以获取数据,然后前进到步骤64以将控制器配置在第一互电容传感器模式1中。在传感器模式1中,例程60前进到步骤66以用驱动信号x设定第一电极并用驱动接收信号y设定第二电极,并且可以将第三电极设定为屏蔽件。此后,例程60前进到步骤68以在传感器模式1下对所配置的互电容传感器上的电容进行采样。传感器模式1可以感测可以用于执行功能(诸如显示信息和激活诸如照明装置等某些装置)的触摸命令。
[0071]
接下来,例程60前进到步骤70以将控制器配置在自电容传感器模式2中。在模式2中,例程60前进到步骤72以将第一电极和第二电极电短路在一起,并且将第三电极设定为屏蔽件。短路在一起的第一电极和第二电极接收自电容输入信号。接下来,在步骤74处,例程60在传感器模式2中对所配置的自电容传感器的电容进行采样。传感器模式2可以用于确定对传感器附近的对象的检测。
[0072]
接下来,例程60前进到步骤76以将控制器配置在互电容传感器模式3中。这包括在步骤78中将第一电极和第二电极电短路在一起以及用驱动信号x设定组合的第一电极和第二电极,并且用接收信号y设定第三电极。接下来,在步骤80中,在于步骤82处结束之前在传感器模式3下对所配置的互电容传感器的电容进行采样。传感器模式3可以检测由用户施加到方向盘输入端的压力,并且可以用于命令与用户触摸命令不同的功能。
[0073]
应当理解,可以快节奏地顺序地重复例程60,使得在模式1、模式2和模式3中的传感器配置的执行之间的采样可以例如以20毫秒的采样速率发生。结果,根据第一实施例,电容式接近传感器总成10能够在具有不同配置的电容传感器的多种模式中顺序地操作,以在四种传感器模式中感测各种信号,特别是对象和输入命令。
[0074]
参考图12,示出了根据一个实施例的用于基于方向盘的旋转位置来控制与接近传感器相关联的输入功能的例程100。例程100在步骤102处开始并且前进到步骤104以获取方向盘角度swa。接下来,在步骤106处,例程100计算多功能开关组的期望位置,所述期望位置是开关组角度spa。在步骤108处,例程100根据开关组角度spa与方向盘角度swa之间的差值除以传感器距离角α并四舍五入为整数值来计算用于多功能开关组的中心传感器的索引,所述索引可以被识别为isensor。最后,在步骤110处,例程100将多功能开关组的中心按钮的isensor值和相邻传感器用于切换输入。
[0075]
参考图13,示出了根据另一个实施例的用于基于方向盘的旋转位置来控制与接近传感器相关联的输入功能的例程120。在该实施例中,例程120在步骤122处开始并且前进到步骤124以获取方向盘角度swa,并且前进到步骤126以计算多功能开关组的期望位置spa。在步骤128处,例程120计算用于开关组的第一传感器的被识别为isensor1的索引,其类似于步骤108的计算,不同的是所述值向下取整为底值整数以消除任何分数值。接下来,在步骤130处,例程120计算用于多功能开关组的第一传感器的被识别为标识符iweight1的权重。然后,例程120使用isensor1和iweight1值来确定针对多功能开关组的中心触摸。在步骤134处,例程120例如使用相邻传感器来确定切换输入。
[0076]
应理解,可以在不脱离本发明的概念的情况下对前述结构做出变动和修改,并且还应理解,除非所附权利要求用其语言明确另有说明,否则此类概念意图由这些权利要求涵盖。
[0077]
根据本发明,提供了一种交通工具方向盘,其具有:可旋转轮缘,所述可旋转轮缘包括芯结构;转向角传感器,所述转向角传感器感测所述轮缘的旋转角度;多个接近传感器,所述多个接近传感器位于所述轮缘上并沿着弧长彼此间隔开;以及控制器,所述控制器处理由所述多个接近传感器中的每一个产生的感测输出并基于所述感测输出确定操作员输入命令,其中所述控制器为所述接近传感器中的每一个分配功能,所述功能随着所述轮缘以一定角度旋转而改变,使得与接近传感器相关联的给定功能保持在同一空间位置处。
[0078]
根据实施例,本发明的特征还在于围绕所述多个接近传感器和所述芯的覆盖包裹物。
[0079]
根据实施例,本发明的特征还在于设置在由所述轮缘限定的开口内的显示器。
[0080]
根据实施例,所述显示器显示与所述多个接近传感器中的至少一个传感器相关联的功能标识符。
[0081]
根据实施例,所述多个接近传感器包括位于所述轮缘的多个侧面上的接近传感器。
[0082]
根据实施例,所述多个接近传感器位于所述轮缘的前侧面、后侧面、顶侧面和底侧面上。
[0083]
根据实施例,所述接近传感器中的每一个被配置为检测用户触摸命令和用户压力命令,并且其中所述控制器基于所述用户触摸命令和所述用户压力命令中的至少一个来控
制一个或多个交通工具相关操作。
[0084]
根据实施例,所述接近传感器中的每一个包括:第一电极;第二电极;和顺应性电介质层,所述顺应性电介质层设置在所述第一电极与所述第二电极之间,其中所述控制器处理与所述第一电极和所述第二电极相关联的信号并且选择性地以不同的接近传感器布置重新配置所述第一电极和所述第二电极的操作以提供被配置为感测触摸的第一电容传感器和被配置为感测压力的第二电容传感器。
[0085]
根据实施例,所述第一电极包括一对电极,所述一对电极可配置为产生互电容以提供第一电容传感器,并且还可配置为产生自电容以提供第二电容传感器。
[0086]
根据实施例,所述一对电极包括第一多个电容指状物和第二多个电容指状物,其中所述第一多个电容指状物与所述第二多个电容指状物叉指形交叉。
[0087]
根据实施例,所述控制器对与所述第一电容传感器、所述第二电容传感器和所述第三电容传感器中的每一者相关联的信号顺序采样。
[0088]
根据本发明,提供了一种交通工具方向盘,其具有:可旋转轮缘,所述可旋转轮缘包括芯结构;转向角传感器,所述转向角传感器感测所述轮缘的旋转角度;多个电容传感器,所述多个电容传感器位于所述轮缘上并沿着弧长彼此间隔开;控制器,所述控制器处理由所述多个电容传感器中的每一个产生的输出并基于所述感测输出确定操作员输入命令,其中所述控制器为所述电容传感器中的每一个分配功能,所述功能随着所述轮缘以一定角度旋转而改变,使得与电容传感器相关联的给定功能保持在同一空间位置处;以及显示器,所述显示器设置在由所述轮缘限定的开口内,其中所述显示器显示与所述多个电容传感器中的至少一个传感器相关联的功能标识符。
[0089]
根据实施例,本发明的特征还在于围绕所述多个电容传感器和所述芯的覆盖包裹物。
[0090]
根据实施例,所述多个电容传感器包括位于所述轮缘的多个侧面上的电容传感器。
[0091]
根据实施例,所述多个电容传感器位于所述轮缘的前侧面、后侧面、顶侧面和底侧面上。
[0092]
根据实施例,所述电容传感器中的每一个被配置为检测用户触摸命令和用户压力命令,并且其中所述控制器基于所述用户触摸命令和所述用户压力命令中的至少一个来控制一个或多个交通工具相关操作。
[0093]
根据实施例,所述电容传感器中的每一个包括:第一电极;第二电极;和顺应性电介质层,所述顺应性电介质层设置在所述第一电极与所述第二电极之间,其中所述控制器处理与所述第一电极和所述第二电极相关联的信号并选择性地以不同的电容传感器布置重新配置所述第一电极和所述第二电极的操作以提供被配置为感测触摸的第一电容传感器和被配置为感测压力的第二电容传感器。
[0094]
根据实施例,所述第一电极包括一对电极,所述一对电极可配置为产生互电容以提供第一电容传感器,并且还可配置为产生自电容以提供第二电容传感器。
[0095]
根据实施例,所述一对电极包括第一多个电容指状物和第二多个电容指状物,其中所述第一多个电容指状物与所述第二多个电容指状物叉指形交叉。
[0096]
根据实施例,所述控制器对与所述第一电容传感器、所述第二电容传感器和所述
第三电容传感器中的每一者相关联的信号顺序采样。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。