1.本发明涉及高速铁路基础设施技术领域,尤其涉及高速铁路钢轨廓形检测方法及装置。
背景技术:
2.在高速动车检测平台下,基于激光三角测量原理的钢轨廓形检测面临一系列难题。其中两个主要问题:一是目前的光条中心提取方法无法满足高速铁路时速350km/h的实时检测需求,二是对钢轨打磨和外部环境光变化较为敏感,由于钢轨表面亮度不均匀或环境光变化被相机采集而引入复杂图像噪声,这些干扰因素会直接影响钢轨廓形光条中心提取。传统的中心提取方法对环境光变化适应能力不强,通常以时间复杂度为代价提高提取精度和可靠性,这类方法往往适用于噪声干扰少和环境光可控的检测场景,而高速检测环境中存在各种噪声干扰,导致钢轨轮廓条纹亮度不均和变形,甚至部分光条缺失,因此传统方法并不适合应用于高速铁路运行状态中。
3.在钢轨廓形检测中,激光采集图像中钢轨廓形的快速准确提取是影响廓形分析和结构光检测系统精度的关键问题之一。在线激光高速检测过程中,钢轨廓形光条容易受到复杂因素干扰而发生变化,如钢轨形状结构、表面粗糙程度和外部环境光等,导致摄像机拍摄的激光条纹粗细和形状也发生相应改变。
4.当列车经过钢轨打磨区段时,由于钢轨表面及轨距角形成镜面反射后的光线射入相机,若反射光线与成像设备光轴一致,会造成该区域的图像过曝。相反,若反射光线偏离成像设备光轴,则会造成该区域图像过暗。最终都会导致轨距角区域光条粗细和形状发生明显变化,严重影响光条中心的准确提取。
5.列车在动态运行过程中因轨道不平顺等原因会产生六自由度的车体振动,由于安装摄像机与钢轨轨道具有一定高度和角度,尤其当阳光与钢轨表面成一定角度时,钢轨表面不可避免被引入环境光噪声,导致钢轨廓形形态缺失,将影响光条中心提取的抗干扰和稳健性。可以将钢轨光条按形状分三类:正常、打磨和环境光干扰。
6.传统的光条中心方法有极值法、模板匹配法、steger方法和灰度重心法等。极值法速度快、计算量小,适用于噪声干扰少的环境,对高速行车下的复杂环境不适用。模板匹配法精度高,但模板卷积计算量太大,对于车载检测系统要求的实时提取不能胜任。steger方法拥有高精度、鲁棒性好的优点,但运算量较大,不适用于实时提取的场景。灰度重心法计算量较小,可以满足实时运算要求,但由于传统灰度重心法只进行行与列两个方向的提取,所以对于钢轨廓形的曲线变化不适用。
7.因此,亟需一种可以克服上述问题的高速铁路钢轨廓形检测方案。
技术实现要素:
8.本发明实施例提供一种高速铁路钢轨廓形检测方法,用以进行高速铁路钢轨廓形检测,提高检测准确率,确保实时性和稳健性,该方法包括:
9.获得高速铁路钢轨图像;
10.根据高速铁路钢轨图像,利用时空上下文算法确定钢轨感兴趣区域像素点;
11.利用dbscan聚类算法对钢轨感兴趣区域像素点进行扫描,确定钢轨感兴趣区域的干扰点簇;
12.对去除干扰点簇后的钢轨感兴趣区域提取最大灰度值点列,得到光条中心初始值;
13.根据所述光条中心初始值和标准钢轨模板,确定第一中心点列;
14.根据所述第一中心点列,利用最小二乘法确定第二中心点列;
15.根据所述第一中心点列和第二中心点列,进行高速铁路钢轨廓形检测。
16.本发明实施例提供一种高速铁路钢轨廓形检测装置,用以进行高速铁路钢轨廓形检测,提高检测准确率,确保实时性和稳健性,该装置包括:
17.图像获得模块,用于获得高速铁路钢轨图像;
18.像素点确定模块,用于根据高速铁路钢轨图像,利用时空上下文算法确定钢轨感兴趣区域像素点;
19.像素点扫描模块,用于利用dbscan聚类算法对钢轨感兴趣区域像素点进行扫描,确定钢轨感兴趣区域的干扰点簇;
20.初始值确定模块,用于对去除干扰点簇后的钢轨感兴趣区域提取最大灰度值点列,得到光条中心初始值;
21.第一点列确定模块,用于根据所述光条中心初始值和标准钢轨模板,确定第一中心点列;
22.第二点列确定模块,用于根据所述第一中心点列,利用最小二乘法确定第二中心点列;
23.钢轨廓形检测模块,用于根据所述第一中心点列和第二中心点列,进行高速铁路钢轨廓形检测。
24.本发明实施例还提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述高速铁路钢轨廓形检测方法。
25.本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有执行上述高速铁路钢轨廓形检测方法的计算机程序。
26.本发明实施例通过获得高速铁路钢轨图像;根据高速铁路钢轨图像,利用时空上下文算法确定钢轨感兴趣区域像素点;利用dbscan聚类算法对钢轨感兴趣区域像素点进行扫描,确定钢轨感兴趣区域的干扰点簇;对去除干扰点簇后的钢轨感兴趣区域提取最大灰度值点列,得到光条中心初始值;根据所述光条中心初始值和标准钢轨模板,确定第一中心点列;根据所述第一中心点列,利用最小二乘法确定第二中心点列;根据所述第一中心点列和第二中心点列,进行高速铁路钢轨廓形检测。本发明实施例考虑了钢轨打磨和外部环境光变化较为敏感情况,利用时空上下文算法确定钢轨感兴趣区域像素点,并利用dbscan聚类算法对钢轨感兴趣区域像素点进行扫描,确定钢轨感兴趣区域的干扰点簇,然后对去除干扰点簇后的钢轨感兴趣区域提取最大灰度值点列,得到光条中心初始值,从而确定第一中心点列和第二中心点列,进而根据第一中心点列和第二中心点列进行高速铁路钢轨廓形
检测,有效提高了检测准确率,确保实时性和稳健性。
附图说明
27.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
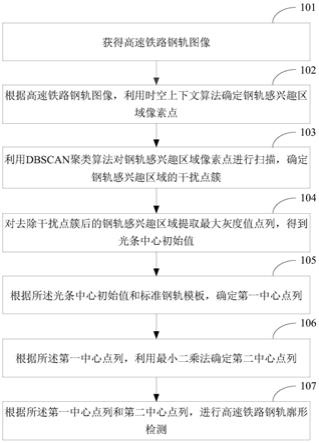
28.图1为本发明实施例中高速铁路钢轨廓形检测方法示意图;
29.图2~图11为本发明具体实施例中高速铁路钢轨廓形检测方法示意图;
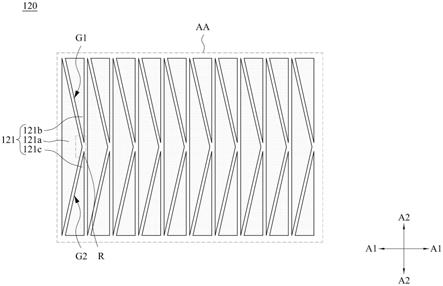
30.图12为本发明实施例中高速铁路钢轨廓形检测装置结构图;
具体实施方式
31.为使本发明实施例的目的、技术方案和优点更加清楚明白,下面结合附图对本发明实施例做进一步详细说明。在此,本发明的示意性实施例及其说明用于解释本发明,但并不作为对本发明的限定。
32.如前所述,运动场景的钢轨廓形提取问题主要分析连续采集图像序列中感兴趣的运动目标,并消除外部环境干扰和形状变化带来的影响。在实际的廓形提取应用中,单一使用这几种经典的光条中心方法都会出现相应问题,主要原因是钢轨打磨和外部环境运行状态下钢轨廓形结构特点与一般光条提取问题区别较大。此外现有方法无法同时兼顾高准确性、实效性和稳健性,这就需要根据不同场景选择合适的方法。
33.为了进行高速铁路钢轨廓形检测,提高检测准确率,确保实时性和稳健性,本发明实施例提供一种高速铁路钢轨廓形检测方法,如图1所示,该方法可以包括:
34.步骤101、获得高速铁路钢轨图像;
35.步骤102、根据高速铁路钢轨图像,利用时空上下文算法确定钢轨感兴趣区域像素点;
36.步骤103、利用dbscan聚类算法对钢轨感兴趣区域像素点进行扫描,确定钢轨感兴趣区域的干扰点簇;
37.步骤104、对去除干扰点簇后的钢轨感兴趣区域提取最大灰度值点列,得到光条中心初始值;
38.步骤105、根据所述光条中心初始值和标准钢轨模板,确定第一中心点列;
39.步骤106、根据所述第一中心点列,利用最小二乘法确定第二中心点列;
40.步骤107、根据所述第一中心点列和第二中心点列,进行高速铁路钢轨廓形检测。
41.由图1所示可以得知,本发明实施例通过获得高速铁路钢轨图像;根据高速铁路钢轨图像,利用时空上下文算法确定钢轨感兴趣区域像素点;利用dbscan聚类算法对钢轨感兴趣区域像素点进行扫描,确定钢轨感兴趣区域的干扰点簇;对去除干扰点簇后的钢轨感兴趣区域提取最大灰度值点列,得到光条中心初始值;根据所述光条中心初始值和标准钢轨模板,确定第一中心点列;根据所述第一中心点列,利用最小二乘法确定第二中心点列;根据所述第一中心点列和第二中心点列,进行高速铁路钢轨廓形检测。本发明实施例考虑了钢轨打磨和外部环境光变化较为敏感情况,利用时空上下文算法确定钢轨感兴趣区域像
素点,并利用dbscan聚类算法对钢轨感兴趣区域像素点进行扫描,确定钢轨感兴趣区域的干扰点簇,然后对去除干扰点簇后的钢轨感兴趣区域提取最大灰度值点列,得到光条中心初始值,从而确定第一中心点列和第二中心点列,进而根据第一中心点列和第二中心点列进行高速铁路钢轨廓形检测,有效提高了检测准确率,确保实时性和稳健性。
42.实施例中,获得高速铁路钢轨图像;根据高速铁路钢轨图像,利用时空上下文算法确定钢轨感兴趣区域像素点。
43.本实施例中,根据高速铁路钢轨图像,利用时空上下文算法确定钢轨感兴趣区域像素点,包括:
44.获得高速铁路钢轨图像的轨头特征轨距点坐标信息和先验引导图,所述先验引导图为包含轨头目标特征的初始追踪区域;
45.根据所述轨头特征轨距点坐标信息和先验引导图,确定钢轨廓形纹理图;
46.根据所述钢轨廓形纹理图和预先建立的时空上下文模型,确定钢轨感兴趣区域像素点。
47.本实施例中,根据所述钢轨廓形纹理图和预先建立的时空上下文模型,确定钢轨感兴趣区域像素点,包括:
48.根据所述钢轨廓形纹理图和预先建立的时空上下文模型,确定目标置信图;
49.根据所述目标置信图的最大极值点,确定钢轨感兴趣区域像素点。
50.具体实施时,对于连续帧目标变化,首先需要指定包含轨头目标特征的初始追踪区域ω0作为先验引导图,并给出轨头特征轨距点坐标信息(x
*
,y
*
),计算钢轨廓形纹理图。行车环境下得到的第t帧时空上下文模型后,按如下公式可以计算得到第t 1帧目标的置信图:
[0051][0052]
置信图中值最大的位置就是钢轨感兴趣区域(roi),搜索该函数的最大极值点为argmax(l
t 1
(x,y))。
[0053]
实施例中,利用dbscan聚类算法对钢轨感兴趣区域像素点进行扫描,确定钢轨感兴趣区域的干扰点簇。
[0054]
具体实施时,利用基于密度的聚类算法dbscan对钢轨数据进行聚类,每幅图像可得到多个点簇,识别出干扰点簇。给定一组包含n个像素点数据p={p1,p2,...,pn},设定ε为邻域半径,m为核心点阈值,则对每个点pn,n
ε
(pn)={p'∈p:d(p',pn)≤ε}为该点的ε邻域;ρ(pn)=|n
ε
(pn)|为该点的密度;若ρ(pn)≥m,则将pn记为p的核心点;若ρ(pn)≤m,且pn的ε邻域中存在核心点,则将pn记为p的边界点;若pn既不是核心点也不是边界点,则将pn记为干扰点。具体的,扫描钢轨感兴趣区域roi像素点,如果某个点ε邻域范围内点数目大于阈值λ
min
,则将其纳入核心点列表,并将其密度直达的点形成对应的临时簇;然后,对于每一个临时簇,检查其中的点是否为核心点,如果是,则将该点对应的临时簇与当前临时簇进行合并,得到新的临时簇;最后,重复此操作,直到当前临时簇中的每一个点不在核心点列表,或其密度直达的点都已经在该临时簇中,则将该临时簇升级成为点簇。继续对剩余的临时簇进行相同的合并操作,直到全部临时簇被处理。上述阈值λ
min
为设定的点簇包含的最小点数量,干扰点即为聚类结果中的孤立点。
[0055]
实施例中,对去除干扰点簇后的钢轨感兴趣区域提取最大灰度值点列,得到光条中心初始值。
[0056]
具体实施时,根据结构光光条截面能量分布的特性,由极值法按列遍历灰度图寻找每列最大灰度值点vq,其对应坐标为(x
max
,y
max
)。记录上述所有的点,将其作为光条中心初始结果。其法线方向邻域范围(-q, q)的取值由光条边缘特性分布确定,在本实验环境的激光亮度和相机参数设置下,取q=10。
[0057]
实施例中,根据所述光条中心初始值和标准钢轨模板,确定第一中心点列。
[0058]
本实施例中,根据所述光条中心初始值和标准钢轨模板,确定第一中心点列,包括:
[0059]
根据所述光条中心初始值,将标准钢轨模板与高速铁路钢轨图像的每个连通域进行匹配,确定每个连通域内的初始法线方向;
[0060]
利用灰度重心法在所述初始法线方向的像素邻域范围内进行光条中心提取,得到第一中心点列。
[0061]
具体实施时,基于标准钢轨模板匹配图像每个连通域,得到连通域的法线方向。计算每个连通域内vq的初始法线方向,归一化处理后,作为该点所在连通域的法线方向。根据灰度重心法在vq的初始法线方向(-q, q)的像素邻域范围内进行光条中心初步提取,得到初始中心点列p1(x
p
,y
p
)。
[0062]
实施例中,根据所述第一中心点列,利用最小二乘法确定第二中心点列。
[0063]
本实施例中,根据所述第一中心点列,利用最小二乘法确定第二中心点列,包括:
[0064]
以所述第一中心点列中每个点为中心,获取每个点对应的预设范围内的一组拟合点;
[0065]
根据预设范围内的一组拟合点,利用最小二乘法进行曲线拟合,得到多个拟合直线;
[0066]
根据所述多个拟合直线,确定修正法线方向;
[0067]
根据所述修正法线方向,确定第二中心点列。
[0068]
具体实施时,根据最小二乘法对点列p1上每个点的k邻域进行曲线拟合,根据如下公式得到每个点修正法线方向后提取得到的精确光条中心点列p2:
[0069][0070][0071][0072]
实施例中,根据所述第一中心点列和第二中心点列,进行高速铁路钢轨廓形检测。
[0073]
本实施例中,根据所述第一中心点列和第二中心点列,进行高速铁路钢轨廓形检测,包括:
[0074]
根据预先建立的马氏距离度量误差分析模型,对所述第一中心点列和第二中心点列进行离群点检测;
[0075]
根据离群点检测的结果,进行高速铁路钢轨廓形检测。
[0076]
具体实施时,对点列p1、p2进行离群点检测。建立如下基于马氏距离度量的误差分析模型:
[0077][0078]
其中,为点列p2和p1的相同序号点坐标,∑为协方差矩阵,若输出的误差超过设定的误差阈值,即判定为离群点,需要进行均值平滑操作,通过调整使光条中心线结果更加平滑和稳定。
[0079]
本发明实施例的有益效果是提出了一种基于法线方向的光条截面灰度分布提取方法,亚像素光条中心结果平均偏差是0.0581个像素,均方差为0.0460个像素,可以用于高速铁路的钢轨廓形光条中心快速提取,适用于钢轨打磨和外部环境光变化较为敏感情况,同时满足时速350km/h的廓形检测的实时性和准确性。对高速铁路钢轨廓形技术研究所面临的廓形分析和结构光检测系统精度进行了有益探索,为钢轨廓形分析和指导钢轨打磨等问题提供数据支撑。
[0080]
下面给出一个具体实施例,说明本发明实施例中高速铁路钢轨廓形检测的具体应用。在本具体实施例中,基于法线方向的光条截面灰度分布提取方法,充分利用截面能量分布函数特性,首先使用置信图的似然函数最大值划分图像,得到图像中感兴趣的钢轨区域roi,然后基于密度的聚类算法dbscan过滤掉干扰区域,最后根据结构光光条截面能量分布的特性,得到亚像素中心点。图2为本发明具体实施例中钢轨廓形检测方法的流程图。根据该操作流程,整个钢轨廓形光条中心提取过程分为分割钢轨区域roi、剔除干扰噪声、标准钢轨廓形模板匹配、钢轨廓形光条中心提取和光条中心修正五个主要步骤。
[0081]
步骤1、基于时空上下文信息分割图像中钢轨区域roi。对于连续帧目标变化,首先需要指定包含轨头目标特征的初始追踪区域ω0作为先验引导图,并给出轨头特征轨距点坐标信息(x
*
,y
*
),计算钢轨廓形纹理图。行车环境下得到的第t帧时空上下文模型后,按如下公式可以计算得到第t 1帧目标的置信图:
[0082][0083]
置信图中值最大的位置就是钢轨感兴趣区域(roi),搜索该函数的最大极值点为argmax(l
t 1
(x,y))。
[0084]
步骤2、利用基于密度的聚类算法dbscan对钢轨数据进行聚类,每幅图像可得到多个点簇,识别出干扰点簇。给定一组包含n个像素点数据p={p1,p2,...,pn},设定ε为邻域半径,m为核心点阈值,则对每个点pn,n
ε
(pn)={p'∈p:d(p',pn)≤ε}为该点的ε邻域;ρ(pn)=|n
ε
(pn)|为该点的密度;若ρ(pn)≥m,则将pn记为p的核心点;若ρ(pn)≤m,且pn的ε邻域中存在核心点,则将pn记为p的边界点;若pn既不是核心点也不是边界点,则将pn记为干扰点。具体的,扫描钢轨感兴趣区域roi像素点,如果某个点ε邻域范围内点数目大于阈值λ
min
,则将其纳入核心点列表,并将其密度直达的点形成对应的临时簇;然后,对于每一个临时簇,检查其中的点是否为核心点,如果是,则将该点对应的临时簇与当前临时簇进行合并,得到新的
临时簇;最后,重复此操作,直到当前临时簇中的每一个点不在核心点列表,或其密度直达的点都已经在该临时簇中,则将该临时簇升级成为点簇。继续对剩余的临时簇进行相同的合并操作,直到全部临时簇被处理。上述阈值λ
min
为设定的点簇包含的最小点数量,干扰点即为聚类结果中的孤立点。
[0085]
步骤3、本发明具体实施例中结构光光条截面能量分布的特性如图3所示,正常区段钢轨廓形光条截面能量分布类似高斯分布,而打磨区段和阳光干扰区段(图4、图5)则不遵循这一特点。采用极值法按列遍历灰度图寻找每列最大灰度值点vq,其对应坐标为(x
max
,y
max
)。记录上述所有的点,将其作为光条中心初始结果。其法线方向邻域范围(-q, q)的取值由光条边缘特性分布确定,在本实验环境的激光亮度和相机参数设置下,取q=10。
[0086]
步骤4、基于标准钢轨模板匹配图像每个连通域,得到连通域的法线方向。计算每个连通域内vq的初始法线方向,归一化处理后,作为该点所在连通域的法线方向。根据灰度重心法在vq的初始法线方向(-q, q)的像素邻域范围内进行光条中心初步提取,得到初始中心点列p1(x
p
,y
p
)。
[0087]
以第一次光条中心点p1(xi,yi)为中心获取预设范围2k个点p1(x
i-k
,y
i-k
),p1(x
i-k 1
,y
i-k 1
),...,p1(x
i k
,y
i k
),作为一组拟合点。根据最小二乘法进行曲线拟合,在得到的多个拟合直线上计算修正法线方向如图6。图7、图8为干扰情况下法线的提取图片,可以看出本方法具有较强的抗干扰性和稳定性。需注意k取值需要在合理范围内,由于噪声干扰的影响,k值过小会受到干扰点影响,导致法线计算产生偏差。在本实例提供的钢轨廓形图像中得到的光条中心点间隔为1.2像素左右,取点的总宽度也应略大于光条宽度,而钢轨光条宽度最高不超过20像素,约为16个点间隔,所以本算法采用的k值为8。
[0088]
然后利用修正的法线方向步进提取得到的精确光条中心点列p2:
[0089][0090][0091][0092]
步骤5、对点列p1、p2进行离群点检测。建立基于马氏距离度量的误差分析模型,若输出的误差超过设定的误差阈值,即判定为离群点,需要进行均值平滑操作。本技术所提供的实例中误差阈值的确定由步骤4精确提取光条中心的步进值为依据,的阈值设置为步进值0.1。通过调整使光条中心线结果更加平滑和稳定。在正常区段的光条中心提取结果如图9所示,打磨区段的提取结果如图10所示,阳光干扰区段的提取结果如图11所示,可以看出基于本发明的提出的算法在实际应用场景遇到的干扰情况下具有较好的稳定性。
[0093]
基于同一发明构思,本发明实施例还提供了一种高速铁路钢轨廓形检测装置,如下面的实施例所述。由于这些解决问题的原理与高速铁路钢轨廓形检测方法相似,因此高速铁路钢轨廓形检测装置的实施可以参见方法的实施,重复之处不再赘述。
[0094]
图12为本发明实施例中高速铁路钢轨廓形检测装置的结构图,如图12所示,该高速铁路钢轨廓形检测装置包括:
[0095]
图像获得模块1201,用于获得高速铁路钢轨图像;
[0096]
像素点确定模块1202,用于根据高速铁路钢轨图像,利用时空上下文算法确定钢轨感兴趣区域像素点;
[0097]
像素点扫描模块1203,用于利用dbscan聚类算法对钢轨感兴趣区域像素点进行扫描,确定钢轨感兴趣区域的干扰点簇;
[0098]
初始值确定模块1204,用于对去除干扰点簇后的钢轨感兴趣区域提取最大灰度值点列,得到光条中心初始值;
[0099]
第一点列确定模块1205,用于根据所述光条中心初始值和标准钢轨模板,确定第一中心点列;
[0100]
第二点列确定模块1206,用于根据所述第一中心点列,利用最小二乘法确定第二中心点列;
[0101]
钢轨廓形检测模块1207,用于根据所述第一中心点列和第二中心点列,进行高速铁路钢轨廓形检测。
[0102]
一个实施例中,所述像素点确定模块1202进一步用于:
[0103]
获得高速铁路钢轨图像的轨头特征轨距点坐标信息和先验引导图,所述先验引导图为包含轨头目标特征的初始追踪区域;
[0104]
根据所述轨头特征轨距点坐标信息和先验引导图,确定钢轨廓形纹理图;
[0105]
根据所述钢轨廓形纹理图和预先建立的时空上下文模型,确定钢轨感兴趣区域像素点。
[0106]
一个实施例中,所述像素点确定模块1202进一步用于:
[0107]
根据所述钢轨廓形纹理图和预先建立的时空上下文模型,确定目标置信图;
[0108]
根据所述目标置信图的最大极值点,确定钢轨感兴趣区域像素点。
[0109]
一个实施例中,所述第一点列确定模块1205进一步用于:
[0110]
根据所述光条中心初始值,将标准钢轨模板与高速铁路钢轨图像的每个连通域进行匹配,确定每个连通域内的初始法线方向;
[0111]
利用灰度重心法在所述初始法线方向的像素邻域范围内进行光条中心提取,得到第一中心点列。
[0112]
一个实施例中,所述第二点列确定模块1206进一步用于:
[0113]
以所述第一中心点列中每个点为中心,获取每个点对应的预设范围内的一组拟合点;
[0114]
根据预设范围内的一组拟合点,利用最小二乘法进行曲线拟合,得到多个拟合直线;
[0115]
根据所述多个拟合直线,确定修正法线方向;
[0116]
根据所述修正法线方向,确定第二中心点列。
[0117]
一个实施例中,所述钢轨廓形检测模块1207进一步用于:
[0118]
根据预先建立的马氏距离度量误差分析模型,对所述第一中心点列和第二中心点列进行离群点检测;
[0119]
根据离群点检测的结果,进行高速铁路钢轨廓形检测。
[0120]
综上所述,本发明实施例通过获得高速铁路钢轨图像;根据高速铁路钢轨图像,利用时空上下文算法确定钢轨感兴趣区域像素点;利用dbscan聚类算法对钢轨感兴趣区域像素点进行扫描,确定钢轨感兴趣区域的干扰点簇;对去除干扰点簇后的钢轨感兴趣区域提取最大灰度值点列,得到光条中心初始值;根据所述光条中心初始值和标准钢轨模板,确定第一中心点列;根据所述第一中心点列,利用最小二乘法确定第二中心点列;根据所述第一中心点列和第二中心点列,进行高速铁路钢轨廓形检测。本发明实施例考虑了钢轨打磨和外部环境光变化较为敏感情况,利用时空上下文算法确定钢轨感兴趣区域像素点,并利用dbscan聚类算法对钢轨感兴趣区域像素点进行扫描,确定钢轨感兴趣区域的干扰点簇,然后对去除干扰点簇后的钢轨感兴趣区域提取最大灰度值点列,得到光条中心初始值,从而确定第一中心点列和第二中心点列,进而根据第一中心点列和第二中心点列进行高速铁路钢轨廓形检测,有效提高了检测准确率,确保实时性和稳健性。
[0121]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0122]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0123]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0124]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0125]
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。