技术特征:
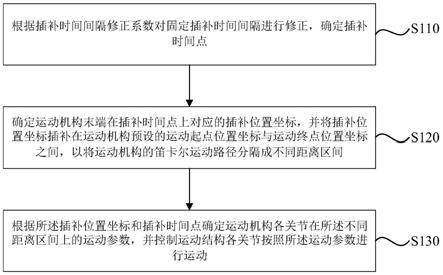
1.一种运动机构的运动控制方法,其特征在于,所述方法包括:根据插补时间间隔修正系数对固定插补时间间隔进行修正,确定插补时间点;确定运动机构末端在插补时间点上对应的插补位置坐标,并将插补位置坐标插补在运动机构预设的运动起点位置坐标与运动终点位置坐标之间,以将运动机构的笛卡尔运动路径分隔成不同距离区间;根据所述插补位置坐标和插补时间点确定运动机构各关节在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动;其中,所述固定插补时间间隔是指相邻两次插补的固定时间间隔。2.根据权利要求1所述的方法,其特征在于,所述根据插补时间间隔修正系数对固定插补时间间隔进行修正,确定插补时间点,包括:对插补时间间隔修正系数和固定插补时间间隔做乘法运算,得到修正时间间隔;根据修正时间间隔对前一次插补的插补时间点进行叠加,确定下一次插补的插补时间点。3.根据权利要求1所述的方法,其特征在于,所述根据插补时间间隔修正系数对固定插补时间间隔进行修正,确定插补时间点之前,包括:获取运动机构预设的运动起点位置坐标和终点位置坐标,确定运动起点与运动终点之间的距离;根据所述距离、运动机构末端的最大运动速度以及最大运动加速度,确定运动机构的位置函数;相应的,所述确定运动机构末端在插补时间点上对应的插补位置坐标,包括:将所述插补时间点带入所述位置函数,得到运动机构末端在插补时间点上对应的插补位置坐标。4.根据权利要求1所述的方法,其特征在于,所述根据所述插补位置坐标和插补时间点确定运动机构各关节在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动,包括:根据插补位置坐标和插补时间点确定运动机构末端在所述不同距离区间上的运动参数;根据所述运动机构末端的运动参数确定运动机构各关节在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动。5.根据权利要求1或4所述的方法,其特征在于,所述运动参数,包括运动速度以及运动加速度。6.根据权利要求1所述的方法,其特征在于,所述笛卡尔运动路径,包括直线运动路径、圆弧运动路径、螺旋线运动路径以及样条曲线运动路径。7.一种运动机构的运动控制装置,其特征在于,所述装置包括:插补时间确定模块,用于根据插补时间间隔修正系数对固定插补时间间隔进行修正,确定插补时间点;插补坐标确定模块,用于确定运动机构末端在插补时间点上对应的插补位置坐标,并将插补位置坐标插补在运动机构预设的运动起点位置坐标与运动终点位置坐标之间,以将运动机构的笛卡尔运动路径分隔成不同距离区间;
运动参数确定模块,用于根据所述插补位置坐标和插补时间点确定运动机构各关节在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动;其中,所述固定插补时间间隔是指相邻两次插补的固定时间间隔。8.根据权利要求7所述的装置,其特征在于,所述插补时间确定模块,包括:修正间隔确定单元,用于对插补时间间隔修正系数和固定插补时间间隔做乘法运算,得到修正时间间隔;时间确定单元,用于根据修正时间间隔对前一次插补的插补时间点进行叠加,确定下一次插补的插补时间点。9.一种电子设备,其特征在于,所述电子设备包括:一个或多个处理器;存储器,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行时,所述一个或多个处理器实现如权利要求1-6中任一项所述的运动机构的运动控制方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-6中任一项所述的运动机构的运动控制方法。
技术总结
本申请实施例公开了一种运动机构的运动控制方法、装置、电子设备及介质。该方法包括:根据插补时间间隔修正系数对固定插补时间间隔进行修正,确定插补时间点;确定运动机构末端在插补时间点上对应的插补位置坐标,并将插补位置坐标插补在运动机构预设的运动起点位置坐标与运动终点位置坐标之间,以将运动机构的笛卡尔运动路径分隔成不同距离区间;根据插补位置坐标和插补时间点确定运动机构各关节在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动。以上方案通过不断变化的插补时间间隔修正系数对固定插补时间间隔进行修正,从而完成了对运动参数的优化,并使优化后的运动参数满足约束条件,保证了运动机构的安全。保证了运动机构的安全。保证了运动机构的安全。
技术研发人员:李方硕 曹俊 林睿 熊军
受保护的技术使用者:苏州灵猴机器人有限公司
技术研发日:2021.11.30
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。