1.本技术实施例涉及自动化控制技术领域,尤其涉及一种运动机构的运动控制方法、装置、电子设备及介质。
背景技术:
2.自动化控制领域通常需要对工业机器人和模组等运动机构在固定路径上进行运动规划。
3.现有技术中对运动机构的运动规划通常在在笛卡尔空间完成,这种方式无法对运动机构各个关节的速度和加速度进行限制和优化,并且现有技术的优化方式不能对规划的速度和加速度进行约束,导致运动机构的运动速度超出安全范围,进而产生安全隐患。
技术实现要素:
4.本技术实施例提供一种运动机构的运动控制优化方法、装置、电子设备及介质,可以对运动机构的运动速度进行优化,将运动机构各关节的运动速度约束在安全范围内。
5.在一个实施例中,本技术实施例提供了一种运动机构的运动控制方法,所述方法包括:
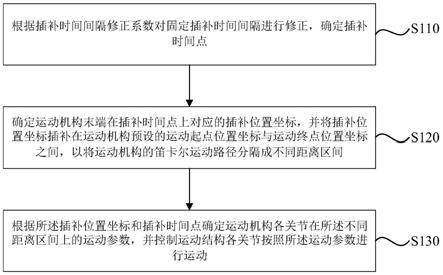
6.根据插补时间间隔修正系数对固定插补时间间隔进行修正,确定插补时间点;
7.确定运动机构末端在插补时间点上对应的插补位置坐标,并将插补位置坐标插补在运动机构预设的运动起点位置坐标与运动终点位置坐标之间,以将运动机构的笛卡尔运动路径分隔成不同距离区间;
8.根据所述插补位置坐标和插补时间点确定运动机构各关节在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动;
9.其中,所述固定插补时间间隔是指相邻两次插补的固定时间间隔。
10.在一个实施例中,本技术实施例提供了一种运动机构的运动控制装置,其特征在于,该装置包括:
11.插补时间确定模块,用于根据插补时间间隔修正系数对固定插补时间间隔进行修正,确定插补时间点。
12.插补坐标确定模块,用于确定运动机构末端在插补时间点上对应的插补位置坐标,并将插补位置坐标插补在运动机构预设的运动起点位置坐标与运动终点位置坐标之间,以将运动机构的笛卡尔运动路径分隔成不同距离区间。
13.运动参数确定模块,用于根据所述插补位置坐标和插补时间点确定运动机构各关节在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动;。
14.其中,所述固定插补时间间隔是指相邻两次插补的固定时间间隔。
15.在一个实施例中,本技术实施例提供了一种电子设备,其特征在于,所述电子设备包括:
16.一个或多个处理器;
17.存储器,用于存储一个或多个程序;
18.当所述一个或多个程序被所述一个或多个处理器执行时,所述一个或多个处理器实现如本技术任一实施例所述的运动机构的运动控制方法。
19.在一个实施例中,本技术实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本技术任一实施例所述的运动机构的运动控制方法。
附图说明
20.图1是本技术一种实施例提供的运动机构的运动控制方法流程图;
21.图2是本技术另一种实施例提供的运动机构的运动控制方法流程图;
22.图3是本技术另一种实施例提供的插补时间间隔修正系数更新流程图;
23.图4是本技术另一种实施例提供的距离参数dk的变化曲线图;
24.图5是本技术另一种实施例提供的异常放大系数变化曲线图;
25.图6是本技术另一种实施例提供的插补时间间隔变化曲线图;
26.图7是本技术另一种实施例提供的优化前后的目标关节运动速度曲线图;
27.图8是本技术一种实施例提供的运动机构的运动控制装置结构框图;
28.图9是本技术一种实施例提供的电子设备的结构示意图。
具体实施方式
29.下面结合附图和实施例对本技术在实施例中作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本技术,而非对本技术的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本技术相关的部分而非全部结构。
30.图1是本技术一种实施例提供的运动机构的运动控制方法流程图,本实施例可适用于对运动机构的运动参数进行优化和约束的场景中。该方法可以由本技术实施例所提供的运动机构的运动控制装置执行,该装置可以由软件和/或硬件的方式来实现,并可集成于电子设备中。
31.如图1所示,本技术实施例中提供的运动机构的运动控制方法可包括以下步骤:
32.s110、根据插补时间间隔修正系数对固定插补时间间隔进行修正,确定插补时间点。其中,所述固定插补时间间隔是指相邻两次插补的固定时间间隔。
33.在运动机构的起点与终点之间添加插补位置坐标时,每个插补位置坐标都对应一个插补时间点。插补时间点是指运动机构从运动起点位置坐标运动到插补位置坐标时的时间。
34.现有技术中,相邻两个插补时间点之间的时间间隔是固定的,而本技术实施例中,通过不断变化的插补时间间隔修正系数对固定插补时间间隔进行修正,使相邻两个插补时间点之间的时间间隔是不断变化的,从而根据不断变化的时间间隔计算每一个插补时间点。
35.其中,插补时间间隔修正系数和固定插补时间间隔可以根据工程实际需求进行设置。插补时间点是根据插补时间间隔修正系数和固定插补时间间隔得到的相对于运动机构
的运动起始时间点的时刻。例如,若运动机构的运动起始时间点是14点,根据插补时间间隔修正系数和固定插补时间间隔得到第一个插补时间点与运动起始时间点之间的时间间隔为10分钟,则第一个插补时间点为14点10分,若计算得到第二个插补时间点与第一个插补时间点之间的插补时间间隔为5分钟,则第二个插补时间点为14点15分,以此类推。
36.s120、确定运动机构末端在插补时间点上对应的插补位置坐标,并将插补位置坐标插补在运动机构预设的运动起点位置坐标与运动终点位置坐标之间,以将运动机构的笛卡尔运动路径分成不同距离区间。
37.其中,运动机构由多个电机组成,单个电机和配套机构组成一个关节。需要说明的是,运动机构在真实世界中完成点到点运动,其真实末端速度由多个关节速度合成,也可以说是多个关节速度合成后得到运动机构末端实际速度,即笛卡尔速度,进一步的,多个关节位置合成后得到运动机构末端位置,即笛卡尔位置。所以,本技术实施例中,通过计算运动机构末端的运动量,从而得到运动机构各个关节的运动量。
38.插补位置坐标可以是在笛卡尔空间中通过笛卡尔坐标系表示的。
39.进一步的,本技术实施例中,所述根据插补时间间隔修正系数对固定插补时间间隔进行修正,确定插补时间点之前,包括:
40.获取运动机构预设的运动起点位置坐标和终点位置坐标,确定运动起点与运动终点之间的距离;
41.根据所述距离、运动机构末端的最大运动速度以及最大运动加速度,确定运动机构的位置函数;
42.相应的,所述确定运动机构末端在插补时间点上对应的插补位置坐标,包括:
43.将所述插补时间点带入所述位置函数,得到运动机构末端在插补时间点上对应的插补位置坐标。
44.本技术实施例中,可以通过插补时间点以及预先设计的运动机构随时间变化的位置函数,确定运动机构末端的插补位置坐标。在一个具体的例子中,位置函数以及插补位置坐标的确定方式如下:
45.设运动机构的起点为q1,终点为q2,最大运动速度为vc,最大运动加速度为ac。首先计算q1和q2之间的距离dc,利用dc、vc和ac可以规划一条时间曲线g(t)。结合起点和终点,可以计算出在任意t时刻,运动机构的位置函数p(t):p(t)=q1 (q
2-q1)*g(t)。那么当确定插补时间点ts之后,可以得到运动机构末端的插补位置坐标p(ts)。
46.其中,g(t)由dc、vc和ac决定,对于不同算法g(t)有不同的表达形式,其基本特征为:单调递增,二次光滑,一阶导数先增大后减小,范围是[0,1],如果采用t型速度规划,g(t)的表达形式如下:其中ta为加速时间,t为总的运动时间。
[0047]
本技术实施例中通过以下公式得到g(t):
[0048][0049]
其中ta为加速时间,t为总的运动时间。
[0050]
进一步的,在得到所有插补位置坐标后,运动机构的运动起点位置坐标、运动终点位置坐标以及插补位置坐标将运动机构的笛卡尔运动路径分隔成不同距离区间。本技术实施例中,所述笛卡尔运动路径,可以是直线运动路径、圆弧运动路径、螺旋线运动路径以及样条曲线运动路径中的任一种形式,即本技术所有的方案均可应用于所有形式的笛卡尔运动中。
[0051]
s130、根据所述插补位置坐标和插补时间点确定运动机构各关节在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动。
[0052]
本技术实施例中,所述运动参数,可以包括运动速度以及运动加速度。
[0053]
具体的,例如q1、q2、q3、q4分别为运动机构的运动起点、第一个插补位置点、第二个插补位置点以及运动终点,t1、t2、t3、t4分别为运动起始时间点、第一个插补时间点、第二个插补时间点以及运动终止时间点。则根据q1、q2、q3、q4的坐标可以计算出相邻两点之间的距离,进而可以计算得到运动机构末端在相邻两点之间的运动速度以及运动加速度,之后可以根据现有技术计算得到运动机构各关节的运动速度以及运动加速度,从而控制运动机构的各关节按照计算出的运动速度以及运动加速度进行运动。
[0054]
本技术实施例通过以下方法完成了对运动机构的运动速度进行优化。方法包括:根据插补时间间隔修正系数对固定插补时间间隔进行修正,确定插补时间点;确定运动机构末端在插补时间点上对应的插补位置坐标,并将插补位置坐标插补在运动机构预设的运动起点位置坐标与运动终点位置坐标之间,以将运动机构的笛卡尔运动路径分隔成不同距离区间;根据所述插补位置坐标和插补时间点确定运动机构各关节在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动。以上方案通过不断变化的插补时间间隔修正系数对固定插补时间间隔进行修正,从而完成了对运动参数的优化,并使优化后的运动参数满足约束条件,保证了运动机构的安全。
[0055]
图2是本技术另一种实施例提供的运动机构的运动控制方法流程图,本实施例以上述实施例为基础进行优化,具体优化步骤如下:
[0056]
s210、对插补时间间隔修正系数和固定插补时间间隔做乘法运算,得到修正时间间隔。
[0057]
其中,修正时间间隔是指相邻两次插补时间点之间的时间间隔。
[0058]
例如,dt为固定插补时间间隔,r
s 1
为第s 1次插补的插补时间间隔修正系数,则第s 1次插补对应的插补时间点与第s次插补对应的插补时间点之间的修正时间间隔为r
s 1
*dt。
[0059]
s220、根据修正时间间隔对前一次插补的插补时间点进行叠加,确定下一次插补
的插补时间点。
[0060]
例如,设第s 1次插补的插补时间点为t
s 1
,第s次插补的插补时间点为ts,则t
s 1
=ts r
s 1
*dt。
[0061]
本技术实施例中,插补时间间隔修正系数的计算步骤如下:
[0062]
1.确定运动机构的位置函数p(t);
[0063]
2.确定运动机构的运动起点和终点,并将运动机构从起点运动到终点所需的时间t划分成k份,记为(t0,t1……
tk),其中t0=0,tk=t,进而可以根据位置函数p(t)计算出所有时间点对应的运动机构末端所在的位置,记为(p0,p1……
pk),其中p0=q1,pk=q2,q1及q2分别为运动起点与终点;时可以计算出所有时间点对应的运动机构末端所在位置相对于运动起点的运动距离,记为(d0,d1……dk
)其中d0=0,dk=dc,dc为q1与q2之间的距离。在一个具体的例子中,以四关节运动机构为例,根据运动机构末端所在的位置(p0,p1……
pk)可以进一步算出四组关节位置(j
m0
,j
m1
……jmk
),其中m=1,2,3,4。
[0064]
3.对步骤2中得到的四组关节位置进行二次差分得到四组关节运动速度和四组关节运动加速度,分别记为(v
m0
,v
m1
……jmk
)和(a
m0
,a
m1
……amk
),已知最大允许关节速度和最大允许关节加速度的分别为(v1,v2,v3,v4)和(a1,a2,a3,a4),引入异常放大系数y,th时刻的异常参数yh计算公式为yh=max(1.0,v
1h
/v1,v
2h
/v2,v
3h
/v3,v
4h
/v4,a
1h
/a1,a
2h
/a2,a
3h
/a3,a
4h
/a4),利用以上公式,可以得到所有时刻的异常放大系数(y0,y1……
yk)。
[0065]
4.令e为插补时间间隔放大系数,且ek=1/yk。则第s 1次插补的插补时间间隔修正系数r
s 1
可通过如下公式进行计算:
[0066]rs 1
=nrs*0.6 rs*0.25 r
s-1
*0.15
[0067]
nrs=em (e
m 1-em)*(ds-dm)/(d
m 1-dm)
[0068]
其中,ds代表第s个插补时间点ts对应的运动机构末端所在位置相对于运动起点的运动距离。
[0069]
从上述公式中可以看出,第s 1次插补的插补时间间隔修正系数r
s 1
与ds有关。所以随着运动机构的不断运动,r
s 1
也随之变化。
[0070]
当得到r
s 1
后,根据公式t
s 1
=ts r
s 1
*dt可以得到第s 1次插补的插补时间间点t
s 1
,再将t
s 1
带入位置函数p(t)即可以得到第s 1次插补的插补位置坐标,同时可以得到d
s 1
。
[0071]
完成第s 1次插补后,根据d
s 1
更新插补时间间隔修正系数,得到第s 2次插补的插补时间间隔修正系数r
s 2
,以此类推,直至完成所有插补。
[0072]
更新插补时间间隔修正系数的流程如图3所示,图3是本技术另一种实施例提供的插补时间间隔修正系数更新流程图。
[0073]
s230、确定运动机构末端在插补时间点上对应的插补位置坐标,并将插补位置坐标插补在运动机构预设的运动起点位置坐标与运动终点位置坐标之间,以将运动机构的笛卡尔运动路径分成不同距离区间。
[0074]
s240、根据插补位置坐标和插补时间点确定运动机构末端在所述不同距离区间上的运动参数。
[0075]
s250、根据所述运动机构末端的运动参数确定运动机构各关节在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动。
[0076]
图4是本技术另一种实施例提供的距离参数dk的变化曲线图,其最大值是路径长度。图5是本技术另一种实施例提供的异常放大系数变化曲线图,其含义代表目标关节运动量数值除以最大允许值所得比例,即安全允许值的放大系数。图6是本技术另一种实施例提供的插补时间间隔变化曲线图,中间部分插补时间间隔变小,有助于降低运动速度,使得运动机构在安全区间运行。图7是本技术另一种实施例提供的优化前后的目标关节运动速度曲线图,可见优化后,目标关节速度处于安全区间内,达到了优化的目的。
[0077]
本技术实施例根据前一次插补的插补位置坐标与运动起点的距离对下一次插补的插补时间间隔修正系数进行更新,进而对插补时间间隔进行修正,得到下一次插补的插补时间点,从而完成了对于运动机构的运动速度的修正,使修正后的运动参数满足约束条件,保证了运动机构的安全。
[0078]
图8是本技术一种实施例提供的运动机构的运动控制装置结构框图,该装置可执行本技术任意实施例所提供的运动机构的运动控制方法,具备执行方法相应的功能模块和有益效果。如图8所示,该装置可以包括:
[0079]
插补时间确定模块310,用于根据插补时间间隔修正系数对固定插补时间间隔进行修正,确定插补时间点。
[0080]
插补坐标确定模块320,用于确定运动机构末端在插补时间点上对应的插补位置坐标,并将插补位置坐标插补在运动机构预设的运动起点位置坐标与运动终点位置坐标之间,以将运动机构的笛卡尔运动路径分隔成不同距离区间。
[0081]
运动参数确定模块330,用于根据所述插补位置坐标和插补时间点确定运动机构各关节在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动;。
[0082]
其中,所述固定插补时间间隔是指相邻两次插补的固定时间间隔。
[0083]
本技术实施例中,所述插补时间确定模块,包括:
[0084]
修正间隔确定单元,用于对插补时间间隔修正系数和固定插补时间间隔做乘法运算,得到修正时间间隔;
[0085]
时间确定单元,用于根据修正时间间隔对前一次插补的插补时间点进行叠加,确定下一次插补的插补时间点。
[0086]
本技术实施例中,所述装置,还包括:
[0087]
距离确定模块,用于获取运动机构预设的运动起点位置坐标和终点位置坐标,确定运动起点与运动终点之间的距离。
[0088]
位置函数确定模块,用于根据所述距离、运动机构末端的最大运动速度以及最大运动加速度,确定运动机构的位置函数。
[0089]
本技术实施例中,所述插补坐标确定模块320,具体用于:
[0090]
将所述插补时间点带入所述位置函数,得到运动机构末端在插补时间点上对应的插补位置坐标。
[0091]
本技术实施例中,所述运动参数确定模块330,包括:
[0092]
末端参数确定单元,用于根据插补位置坐标和插补时间点确定运动机构末端在所述不同距离区间上的运动参数。
[0093]
关节参数确定单元,用于根据所述运动机构末端的运动参数确定运动机构各关节
在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动。
[0094]
本技术实施例中,所述运动参数,包括运动速度以及运动加速度。
[0095]
本技术实施例中,所述笛卡尔运动路径,包括直线运动路径、圆弧运动路径、螺旋线运动路径以及样条曲线运动路径。
[0096]
上述产品可执行本技术实施例所提供的运动机构的运动控制方法,具备执行方法相应的功能模块和有益效果。
[0097]
图9是本技术一种实施例提供的电子设备的结构示意图。图9示出了适于用来实现本技术实施例的示例性电子设备712的框图。图9显示的电子设备712仅仅是一个示例,不应对本技术实施例的功能和使用范围带来任何限制。
[0098]
如图9所示,电子设备712可以包括:一个或多个处理器716;存储器728,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器716执行,使得所述一个或多个处理器716实现本技术实施例所提供的运动机构的运动控制方法,包括:
[0099]
根据插补时间间隔修正系数对固定插补时间间隔进行修正,确定插补时间点;
[0100]
确定运动机构末端在插补时间点上对应的插补位置坐标,并将插补位置坐标插补在运动机构预设的运动起点位置坐标与运动终点位置坐标之间,以将运动机构的笛卡尔运动路径分隔成不同距离区间;
[0101]
根据所述插补位置坐标和插补时间点确定运动机构各关节在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动;
[0102]
其中,所述固定插补时间间隔是指相邻两次插补的固定时间间隔。
[0103]
电子设备712的组件可以包括但不限于:一个或者多个处理器716,存储器728,连接不同设备组件(包括存储器728和处理器716)的总线718。
[0104]
总线718表示几类总线结构中的一种或多种,包括存储器总线或者存储器控制器,外围总线,图形加速端口,处理器或者使用多种总线结构中的任意总线结构的局域总线。举例来说,这些体系结构包括但不限于工业标准体系结构(isa)总线,微通道体系结构(mac)总线,处理型isa总线、视频电子标准协会(vesa)局域总线以及外围组件互连(pci)总线。
[0105]
电子设备712典型地包括多种计算机设备可读存储介质。这些存储介质可以是任何能够被电子设备712访问的可用存储介质,包括易失性和非易失性存储介质,可移动的和不可移动的存储介质。
[0106]
存储器728可以包括易失性存储器形式的计算机设备可读存储介质,例如随机存取存储器(ram)730和/或高速缓存存储器732。电子设备712可以进一步包括其它可移动/不可移动的、易失性/非易失性计算机设备存储介质。仅作为举例,存储系统734可以用于读写不可移动的、非易失性磁存储介质(图9未显示,通常称为“硬盘驱动器”)。尽管9中未示出,可以提供用于对可移动非易失性磁盘(例如“软盘”)读写的磁盘驱动器,以及对可移动非易失性光盘(例如cd-rom,dvd-rom或者其它光存储介质)读写的光盘驱动器。在这些情况下,每个驱动器可以通过一个或者多个数据存储介质接口与总线718相连。存储器728可以包括至少一个程序产品,该程序产品具有一组(例如至少一个)程序模块,这些程序模块被配置以执行本技术各实施例的功能。
[0107]
具有一组(至少一个)程序模块742的程序/实用工具740,可以存储在例如存储器728中,这样的程序模块742包括但不限于操作设备、一个或者多个应用程序、其它程序模块
以及程序数据,这些示例中的每一个或某种组合中可能包括网络环境的实现。程序模块742通常执行本技术所描述的实施例中的功能和/或方法。
[0108]
电子设备712也可以与一个或多个外部设备714和/或显示器724等通信,还可与一个或者多个使得用户能与该电子设备712交互的设备通信,和/或与使得该电子设备712能与一个或多个其它计算设备进行通信的任何设备(例如网卡,调制解调器等等)通信。这种通信可以通过输入/输出(i/o)接口722进行。并且,电子设备712还可以通过网络适配器720与一个或者多个网络(例如局域网(lan),广域网(wan)和/或公共网络,例如因特网)通信。如图9所示,网络适配器720通过总线718与电子设备712的其它模块通信。应当明白,尽管图9中未示出,可以结合电子设备712使用其它硬件和/或软件模块,包括但不限于:微代码、设备驱动器、冗余处理单元、外部磁盘驱动阵列、raid设备、磁带驱动器以及数据备份存储设备等。
[0109]
处理器716通过运行存储在存储器728中的多个程序中其他程序的至少一个,从而执行各种功能应用以及数据处理,例如实现本技术实施例所提供的运动机构的运动控制方法。
[0110]
本技术一种实施例提供了一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行本技术实施例所提供的运动机构的运动控制方法,包括:
[0111]
根据插补时间间隔修正系数对固定插补时间间隔进行修正,确定插补时间点;
[0112]
确定运动机构末端在插补时间点上对应的插补位置坐标,并将插补位置坐标插补在运动机构预设的运动起点位置坐标与运动终点位置坐标之间,以将运动机构的笛卡尔运动路径分隔成不同距离区间;
[0113]
根据所述插补位置坐标和插补时间点确定运动机构各关节在所述不同距离区间上的运动参数,并控制运动结构各关节按照所述运动参数进行运动;
[0114]
其中,所述固定插补时间间隔是指相邻两次插补的固定时间间隔。
[0115]
本技术实施例的计算机存储介质,可以采用一个或多个计算机可读的存储介质的任意组合。计算机可读存储介质可以是计算机可读信号存储介质或者计算机可读存储介质。计算机可读存储介质例如可以是——但不限于——电、磁、光、电磁、红外线、或半导体的设备、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑磁盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本技术实施例中,计算机可读存储介质可以是任何包含或存储程序的有形存储介质,该程序可以被指令执行设备、装置或者器件使用或者与其结合使用。
[0116]
计算机可读的信号存储介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了计算机可读的程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。计算机可读的信号存储介质还可以是计算机可读存储介质以外的任何计算机可读存储介质,该计算机可读存储介质可以发送、传播或者传输用于由指令执行设备、装置或者器件使用或者与其结合使用的程序。
[0117]
计算机可读存储介质上包含的程序代码可以用任何适当的存储介质传输,包
括——但不限于无线、电线、光缆、rf等等,或者上述的任意合适的组合。
[0118]
可以以一种或多种程序设计语言或其组合来编写用于执行本技术操作的计算机程序代码,所述程序设计语言包括面向对象的程序设计语言—诸如java、smalltalk、c ,还包括常规的过程式程序设计语言—诸如“c”语言或类似的程序设计语言。程序代码可以完全地在用户计算机上执行、部分地在用户计算机上执行、作为一个独立的软件包执行、部分在用户计算机上部分在远程计算机上执行、或者完全在远程计算机或设备上执行。在涉及远程计算机的情形中,远程计算机可以通过任意种类的网络——包括局域网(lan)或广域网(wan)—连接到用户计算机,或者,可以连接到外部计算机(例如利用因特网服务提供商来通过因特网连接)。
[0119]
注意,上述仅为本技术的较佳实施例及所运用技术原理。本领域技术人员会理解,本技术不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本技术的保护范围。因此,虽然通过以上实施例对本技术进行了较为详细的说明,但是本技术不仅仅限于以上实施例,在不脱离本技术构思的情况下,还可以包括更多其他等效实施例,而本技术的范围由所附的权利要求范围决定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。