1.本发明涉及基于级联硅基微环调制器的高线性调制器芯片,特别涉及一种基于级联硅基微环调制器的高线性调制器芯片和调制方法。
背景技术:
2.近年来,融合了微波技术和光波技术的微波光子技术在无线通信、光纤射频传输系统以及雷达电子战等方面得到了广泛应用。它主要研究如何利用光电器件和光学方法来实现微波/毫米波信号的产生、传输、处理和检测等。随着微波光子系统实现功能复杂度的提升以及对成本降低的迫切需要,要求从器件到系统减小尺寸、重量和功耗,实现系统的小型化、轻型化和低成本化。
3.在微波光子链路中,实现微波信号从电域转换到光域的调制器性能至关重要,这是因为调制器的传输函数具有一定的非线性,在调制过程中将会产生除一阶谐波信号之外的高阶谐波和交调信号,特别是三阶谐波hd3(the 3
rd harmonic distortion,hd3)与三阶交调信号imd3(the 3
rd inter-modulation distortion,imd3)降低了微波光子系统的无杂散动态范围sfdr(spurious-free-dynamic-range,sfdr)。要实现微波信号在模拟光链路中的高保真传输,以及实现高动态的链路性能,调制器的线性度是一个非常重要的指标。
4.目前大多数微波光子链路中使用的是铌酸锂调制器,但是铌酸锂调制器具有体积大、插损大和功耗高等缺点。相比之下,具有体积小、功耗低、cmos(complementary metal oxide semiconductor,cmos)兼容以及可以光电单片集成等优势的硅光集成平台,在微波光子系统小型化和低成本化方面具有非常大的潜力。硅基调制器作为重要的硅光器件对链路性能影响重大。硅基调制器根据结构可以分为硅基马赫曾德尔调制器(silicon-based mach-zehnder modulator,si-mzm)和硅基微环调制器(silicon-based ring modulator,si-mrm)。相比于si-mzm,si-mrm具有超小尺寸、超低功耗和超大带宽等优势,在微波光子系统小型化中具有很大潜力。然而si-mrm受洛伦兹调制曲线和载流子色散效应的影响,其具有非常强的电光调制非线性,即在调制过程中会产生非常强的三阶谐波和交调非线性信号,从而降低了微波光子链路的动态范围。因此如何提高si-mrm的线性度是当前学术界和工业界非常关注的一个科学问题。
5.目前提高si-mrm线性度的方法可以分为两类:第一类是在硅光芯片上集成线性电光材料薄膜,例如硅基铌酸锂薄膜微环调制器。该方法由于使用了线性电光材料,相比基于载流子色散效应的si-mrm在线性度上有一定程度的提高。但是这种方法引入了非常复杂的加工工艺,将会引入非常高的成本。并且该方法不可以实现光电器件单片集成,不利于微波光子系统进一步集成化和小型化。第二种方法是利用dc-kerr效应的非线性抵消载流子色散效应的非线性,从而实现si-mrm的高线性调制。然而这种方法改变了芯片代工厂的工艺流程,提高了芯片加工的复杂度与成本。
技术实现要素:
6.为了克服现有技术的不足,本发明提出了一种基于级联硅基微环调制器的高线性调制芯片和调制方法,该方法通过输入两个相同功率的光载波信号,分别耦合到对应的si-mrm中,调控两个si-mrm的工作点,使其中一个si-mrm工作在一阶谐波hd1相对最大工作点,另一个si-mrm工作在三阶谐波hd3相对最大工作点,同时保证这两个工作点相位相差π。通过调控加载在两个si-mrm上的调制信号的功分比,可以实现hd3分量的完全抵消,且保持hd1分量功率大小基本不变。
7.本发明的技术方案如下:
8.本发明首先提供了一种基于级联硅基微环调制器的高线性调制器芯片,其包括:两个用于将激光器输出的光载波信号耦合入调制器芯片中的输入端耦合器、一个用于将两路输入端耦合器的光信号合成为一路的合束器、与合束器相连用于传输光信号的总线波导、两个级联的硅基微环调制器(silicon-based micro-ring modulator1,si-mrm1)、一个与总线波导相连的输出端耦合器;
9.两个级联的硅基微环调制器包括第一硅基微环调制器和第二硅基微环调制器,两个硅基微环调制器完全相同,耦合在同一根总线波导上。
10.作为本发明的优选方案,所述的输入端耦合器为光栅耦合器或端面耦合器;所述的输出端耦合器为光栅耦合器或端面耦合器。
11.作为本发明的优选方案,所述的用于将两路输入端耦合器的光信号合成为一路的合束器为光合束器或波分复用器。
12.作为本发明的优选方案,所述硅基微环调制器为直通型微环调制器,包括嵌入了pn结移相器的微环谐振腔,所述硅基微环调制器集成有热光移相器,用来调控工作点;第一硅基微环调制器和第二硅基微环调制器的谐振腔分布在同一根总线波导的一侧。
13.本发明还公开了上述高线性调制器芯片的调制方法,其包括如下步骤:
14.1)两个波长分别为λ1和λ2的外设激光器输出的光载波信号通过输入端耦合器分别耦合入调制器芯片;
15.2)两个输入端耦合器的两路不同波长的光载波信号经过合束器合成一路光信号并在总线波导中传输;
16.3)调控两个硅基微环调制器上pn结移相器的反偏电压v
dc1
和v
dc2
,使得两个硅基微环调制器上的pn结调制臂工作在反偏区;
17.4)调控两个硅基微环调制器上的热光移相器,使第一硅基微环调制器工作在hd1相对最大点,第二硅基微环调制器工作在hd3相对最大点,而且两个工作点的相位相差π;
18.5)使用射频信号发生器产生双音调制信号并通过功分比可调的射频功分器分成两路;两路双音信号分别与电压源产生的两路直流反向偏压通过两个bias-tee加载在对应的两个硅基微环调制器上;
19.6)通过调控射频功分器的功分比,使两个硅基微环调制器产生的三阶非线性hd3在光电探测器端相互抵消,而hd1分量功率变化在3db以内,提高链路的动态范围。
20.作为本发明的优选方案,所述高线性调制器芯片调制后的光信号在接入到光电探测器中进行解调前,还包括将高线性调制器芯片调制后的光信号经光纤放大器放大用以补偿芯片的耦合损耗的步骤。
21.作为本发明的优选方案,所述的步骤6)具体为:光信号接入到光电探测器中进行解调,将解调后的信号通入频谱仪,调控射频功分器的功分比来调控加载在两个硅基微环调制器上的双音调制信号功率之比,同时观察频谱仪上一阶谐波hd1和三阶交调信号imd3的功率,直至hd1与imd3之间的功率差最大,同时保证hd1的功率大于imd3的功率,并且hd1分量功率变化在3db以内,此时为该调制器芯片最佳线性工作点。
22.作为本发明的优选方案,所述的步骤4)具体为:
23.4.1)调控硅基微环两个调制器上的热光移相器,使波长为λ1和λ2的光载波分别耦合入第一硅基微环调制器和第二硅基微环调制器中;
24.4.2)调控第一硅基微环调制器的热光移相器使其工作在调制器转移函数的最大斜率处,对应的是一阶谐波分量hd1最大点;
25.4.3)调控第二硅基微环调制器的热光移相器使其工作在三阶非线性最大点同时保证与第一硅基微环调制器工作点方向相反,对应的是三阶谐波分量hd3最大。
26.相比于通过改变芯片加工工艺来提高si-mrm的线性度,本发明的有益效果是,在不改变芯片代工厂工艺参数以及流程的前提下,通过简单地调控加载在两个si-mrm上调制信号分配比,就可以找到三阶交调imd3最小的工作点,并且在找到三阶交调信号imd3最小的情况下,一阶谐波hd1基本保持最大值。这种方法不会由于工艺改变而带来很高的加工复杂度和成本,仅通过改变加载在两个si-mrm上的调制信号的功分比即可实现基于高线性硅基调制器的高线性微波光子链路。由于该芯片制造工艺基于cmos工艺,即可以将光子芯片和电子芯片做在同一块芯片上,这样做可以将外围的控制芯片与其集成在同一块芯片上,大大减低了整个系统的尺寸与功耗,也节省了生产成本。
附图说明
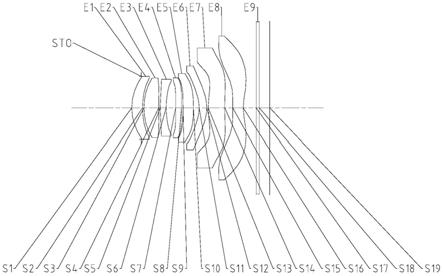
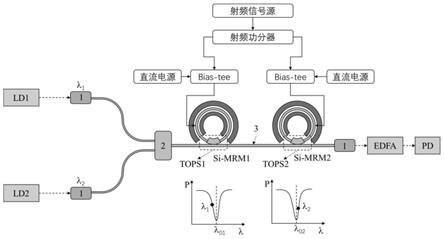
27.图1是本发明的调制器结构示意图以及测试流程示意图。
28.图2是微环调制器调制原理示意图。
29.图3是微环调制器hd1和hd3分量随波长变化的仿真结果。横坐标为相对于谐振波长的波长失谐量(frequency detuning),“0”代表工作点为谐振波长点。
具体实施方式
30.下面结合附图和实施例对本发明做进一步说明。
31.如图1所示,基于级联硅基微环调制器的高线性调制器芯片包括:两个用于将激光器输出的光载波信号耦合入调制器芯片中的输入端耦合器、一个用于将两路输入端耦合器的光信号合成为一路的合束器、与合束器相连用于传输光信号的总线波导、两个级联的硅基微环调制器(si-mrm1)、一个与总线波导相连的输出端耦合器;
32.两个级联的硅基微环调制器包括第一硅基微环调制器和第二硅基微环调制器,两个硅基微环调制器完全相同,耦合在同一根总线波导上。图中“1”为调制器芯片与光纤的耦合器,通常是光栅耦合器或端面耦合器。“2”为片上光合束器或者波分复用器,“3”为总线波导。
33.如图1所示,本发明级联两个基于载流子耗尽型的si-mrm,并且两个si-mrm的谐振腔在分布在同一根总线波导一侧。两路不同波长的光载波通过片上光合束器或波分复用器
合成并通过同一根总线波导传输,并分别耦合入对应的si-mrm中。通过调控两个si-mrm上的热光移相器使两个si-mrm分别工作在hd1相对最大点和hd3相对最大点,而且两个工作点的相位相差π。在次基础上,调控射频功分器的功率分配比,让经过两级调制器产生的hd3分量在高速探测器解调时相互抵消,同时较小地改变输出的hd1分量的功率。
34.基于级联硅基微环调制器的高线性调制方法包括如下步骤:
35.1)两个波长不同的激光器输出两路未调制的光载波信号通过图1中结构“1”耦合入调制器芯片中;
36.2)如图1所示,两路光信号由结构“2”合成为一路光信号并由总线波导“3”传输;
37.3)如图1所示,两个直流电源产生两路反偏电压(一般为-2v),射频双音调制信号经过功分比可调的射频功分器分成两路,这两路射频电信号和对应的反偏电压经两个bias-tee合路后分别加载在si-mrm1和si-mrm2的pn结移相器上。调制信号加载在微环调制器上之后,微环调制器的谐振波长就会改变,从而改变了总线波导的输出光功率,实现了调制功能。图2中为包含了微环调制器的洛伦兹转移曲线、调制信号以及调制后的光信号原理示意图;
38.4)调控si-mrm1和si-mrm2上的热光移相器tops1和tops2使对应波长为λ1和λ2的两个光载波信号分别耦合入si-mrm1和si-mrm2中,并且使两个调制器的工作点分别工作在hd1相对最大点和imd3相对最大点,hd1和imd3与微环调制器波长之间的关系。可以看出,不通波长处hd1和imd3分量相对大小不同;
39.5)调制后的光信号经结构“1”输出并经过edfa放大补偿芯片的耦合损耗,最后输入到高速光电探测器中解调;
40.6)解调后的得到的电信号输入到电频谱仪中,调控射频功分器功分比γ同时通过电频谱仪观察hd1和imd3分量的相对大小,即载波失真抑制比cdr(carrier to distortion ratio);
41.7)重复步骤“6)”,直至cdr达到最大,且hd1分量变化不大为止,此时为最佳线性调制点。具体为:将解调后的信号通入频谱仪,调控射频功分器的功分比来调控加载在两个si-mrm上的双音调制信号功率之比,同时观察频谱仪上一阶谐波hd1和三阶交调信号imd3的功率,直至hd1与imd3之间的功率差最大(同时保证hd1的功率大于imd3的功率),并且hd1基本保持不变为止,此时为该调制器芯片最佳线性工作点。
42.本发明根据时域耦合模理论,推导出了考虑三阶谐波影响的单个微环调制器线性度理论:
43.假设角频率为ω
rf
,幅度为v0的rf调制信号v0cosω
rf
t加载在微环调制器上,产生的ac交流信号为:
[0044][0045]
式中f(ω
rf
)和分别表示频率响应的模和相位。
[0046]
根据时域耦合模理论,存储在微环的能量振幅α(t)满足:
[0047][0048]
其中,ω和am分别表示入射光场振幅的角频率和振幅,ω0表示微环调制器共振角
频率。1/τ表示整个微环谐振腔内光场的振幅衰减率。通过控制pn结设计参数可以调整ω0和1/τ,因此设计并制作好的微环调制器都有固定的ω0和1/τ(haifeng shao,hui yu,xia li,yan li,jianfei jiang,huan wei,gencheng wang,tingge dai,qimei chen,jianyi yang,and xiaoqing jiang.on-chip microwave signal generation based on a silicon microring modulator[j].optics letters,2015,40(14):3360-3363)。
[0049]
对于单个硅基微环调制器,其总线波导的传输光场s(t)=ae
jωt-jμa(t)。为了得到微环调制器三阶非线性并简化计算,对ω0和1/τ进行泰勒展开到第四项,得到:
[0050][0051][0052]
其中,ω
dc
和1/τ
dc
分别表示在直流偏置点的共振频率和振幅衰减率。k1、k2、k3是ω0在直流偏置点展开时对应的一阶项、二阶项及三阶项的系数,r1、r2、r3是1/τ在直流偏置点展开时对应的一阶项、二阶项及三阶项的系数。这些系数由微环耦合状态和波导模式决定,可通过实验测试结果拟合得到。
[0053]
将公式(3)-(4)带入到公式(2)中可得:
[0054][0055]
根据公式(5)中的微分方程可得α(t)的表达式:
[0056][0057]
其中,用a,b,c,d表达式如下所示:
[0058][0059]
将公式(6)带入到s(t)中可得到时域下的传输光场s(t),对应的光功率为|s(t)|2。由于接收端使用的是平方律检波的高速光电探测器对调制光信号进行解调,根据公式(2)-(4)得到可计算出一阶谐波分量hd1、二阶谐波hd(the 2
nd harmonic distortion,hd2)和三阶谐波hd3的光功率分别为:
[0060]
hd1=∫|s(t)|2cos(ω
rf
t)dt ∫|s(t)|2sin(ω
rf
t)dt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0061]
hd2=∫|s(t)|2cos(2ω
rf
t)dt ∫|s(t)|2sin(2ω
rf
t)dt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0062]
hd3=∫|s(t)|2cos(3ω
rf
t)dt ∫|s(t)|2sin(3ω
rf
t)dt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0063]
根据文献以及光电探测器平方律检波这一特性可知,解调后的三阶交调非线性imd3(the3
rd inter-modulated distortion,imd3)比hd3的电功率高9.5db,即p
imd3
=p
hd3
9.5db。因此找到hd3最小工作点也是找到imd3的最小工作点。
[0064]
基于上述非线性理论,可以得到归一化的微环调制器中hd1和hd3的相对大小与工作波长之间的关系,如图3所示。基于该仿真结果,调控si-mrm1和si-mrm2上的tops1和tops2使si-mrm1工作在hd1相对hd3最大点,si-mrm2工作在hd3相对hd1最大点。令此时si-mrm1输出的hd1和hd3的光功率分别为p
hd1-mrm1
和p
hd3-mrm1
,si-mrm2输出的hd1和hd3的光功率分别为p
hd1-mrm2
和p
hd3-mrm2
。通过调控加载在si-mrm1和si-mrm2上的调制信号的功率比γ,可以灵活控制两个硅基微环调制器输出的hd1和hd3分量的光功率。由于两个调制器的工作点相位相差π,因此可以达到hd3相互抵消而hd1基本没有变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。