1.本发明涉及一种基于超声波实现风电叶片缺陷自动检测的方法,属于风电叶片缺陷检 测技术领域。
背景技术:
2.在传统能源如煤、石油等严重告急以及全球生态环境遭受到严重破坏的双重压力下,可 再生资源如风能、太阳能等具有取之不尽、用之不竭、清洁、无污染等特点,而得到广泛地 开发和应用。风能作为一种绿色新能源,故认为是国家未来电力的一个发展方向。据国家能 源局数据显示,截至2020年12月底,全国并网风电装机2.81亿千瓦,同比增长33.1%。
3.随着风机安装容量的持续增长,其安全性能也越来越成为关注的焦点,风电叶片作为 风电机组的重要组成部件之一,其是否存在安全隐患是我们应该重要考虑的问题,当风电 叶片出现质量问题时,不仅会揽坏叶片,而且还会对整个风电机组造成一定程度的损坏, 大部分叶片在制作完成后都可能存在一些缺陷,较大尺寸的缺陷可以采用目视法检测出来, 而一些内部不明显的缺陷很难用肉眼检测到。另外,目测法具有人为主观性,而且对人员 的经验要求很高,它提供的检测结果不够准确且效率也比较低。而且,叶片在制造、运输、 安装和运行过程中,不可避免地会发生分层、脱粘、缺胶和断裂等缺陷,如果不能及时对 这些缺陷进行检测并修复,在短期内缺陷累积会最终导致叶片失效,影响风电机组正常运 行。虽然一些物理机械方法可以检测叶片的缺陷,但检测后会对叶片造成一定程度上的破 坏,因此,在不破坏风电叶片的情况下,对叶片缺陷进行无损检测是风电行业的一个重要 研究方向。
4.近年来许多无损检测技术被提出,如合成孔径聚焦技术,声发射分析和光纤传感器技 术等用于损伤检测,其中超声检测技术有其自身的优点,在各类结构检测中得到了广泛应 用,与其他无损检测相比,超声检测技术具有能量传播快、穿透性强、检测速度快、安全 监测等优点,尽管超声检测在损伤检测方面取得了很大成就,但仍有一定的局限性,例如, 其对垂直或陡峭缺陷的检测灵敏度低,且检测结果易受外界条件干扰,导致检测精度差。
技术实现要素:
5.针对现有技术存在的上述问题,本发明的目的是提供一种基于超声波实现风电叶片缺 陷自动检测的方法,以实现高效、无损、实时检测出风电叶片的缺陷,为风电叶片的安全 使用提供及时预警和有力保障。
6.为实现上述目的,本发明采用如下技术方案:
7.一种基于超声波实现风电叶片缺陷自动检测的方法,包括如下步骤:
8.s1、使巡检车行驶至需要缺陷检测的风电叶片内,所述巡检车包括车架和对称设于车 架左右两侧的车轮,各车轮分别通过各自的轮轴与车架转动连接,所述车架的前端设
有摄 像机,所述车架的顶部设有超声波发射接收仪,所述超声波发射接收仪包括超声波信号激 励单元和超声波信号接收单元,所述车架的底部设有安装槽,所述安装槽内设有可竖直方 向伸缩的电动伸缩架,所述电动伸缩架的底部设有阵列超声传感器,所述阵列超声传感器 通过电动伸缩架与车架相连,所述阵列超声传感器的发射端与超声波信号激励单元信号连 接,阵列超声传感器的接收端与超声波信号接收单元信号连接,且所述超声波信号接收单 元信号连接有工业计算机;
9.s2、随着巡检车的移动,超声波发射接收仪的超声波信号激励单元产生超声波脉冲信 号并通过阵列超声传感器的发射端向风电叶片输入振动能量,使产生频率为20~100khz范 围内的超声波;阵列超声传感器的接收端采集声波回波信号并将其传输给超声波发射接收 仪的超声波信号接收单元,超声波信号接收单元接受回波信号并对信号进行预处理,并将 预处理后的回波信号传递给工业计算机;
10.s3、由计算机采用matlab软件对接收的散射回波信号进行数据存储和信号处理,然 后依据逆时偏移成像算法进行成像处理,得到检测区域的风电叶片的内部图像,将获取的 图像与标准图像比较以判断风电叶片是否存在缺陷,当判断结果显示存在缺陷时,巡检车 停止行驶,摄像机对缺陷位置进行拍照,从而完成风电叶片缺陷的自动化检测并对缺陷位 置进行定位。
11.一种实施方案,步骤s3中,所述逆时偏移成像算法具体如下:
12.所述阵列超声传感器是由若干超声传感器呈阵列组成,所述阵列超声传感器采用一发 多收的模式,由一组超声传感器发射超声波,其余超声传感器接收超声波,将发射超声波 的传感器称之为发射传感器,也相当于阵列超声传感器的发射端,把接收超声波的传感器 称之为接收传感器,也相当于阵列超声传感器的接收端;
13.假设风电叶片存在一个缺陷,则由超声波信号激励单元和发射传感器发射的超声波在 缺陷位置处会发生散射,从而产生散射源,我们将散射源位置定义为缺陷位置a,将非散射 源位置定义为非缺陷位置b,将接收传感器r的位置定义为o,将超声波在缺陷位置散射 后产生的散射源定义为波源s;
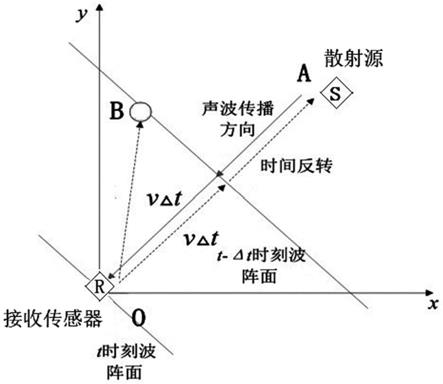
14.所述逆时偏移成像算法基于惠更斯原理,即波阵面上所有的点都视作球面波的第二波 源,波源s出发的波阵面信号在时刻t传播至接收传感器r并被记录下来,再利用记录的散 射波信号向波源s回传,声波速度为v,经过时间δt沿声波传播方向回传vδt距离至t-δt时 刻波阵面;
15.设a的位移场经路径ao传播至o处的位移场为:
[0016][0017]
公式(1)中,表示波源s出发的波阵面信号从散射源a处经路径ao传播至o 处的位移场,表示散射源a的位移场,^表示时域声位移场的傅里叶变换, 为传递函数,a
ao
(ω)表示幅值,ρ
ao
表示ao的长度,k表示为波数;
[0018]
则o位置处位移场时间反转后,经路径oa传播至a处的位移场为:
[0019][0020]
公式(2)中符号*表示复共轭,ao与oa路径相同,则ρ
ao
=ρ
oa
,g
oa
(ω)=g
ao
(ω), 公式中g
ao*
(ω)g
ao
(ω)一项是实、偶、正函数,它在时间零点的傅里叶反变换是同相迭加的, 会得到主相关峰值,这样回传出的波形幅值上得到增强;
[0021]
则o位置处位移场时间反转后,经路径ob传播至b处的位移场为:
[0022][0023]
公式(3)中,表示相移分量,在时间零点傅里叶反变换并不能同相迭加,不 能得到主相关峰值,幅值不会得到聚焦;
[0024]
假设由一对发射-接收传感器沿时间长度(0,t)记录的散射场经由逆向外推后的位 移场为:
[0025][0026]
公式(4)中,ρj=|x-xj|,代表由xj接收传感器位 置,t=0时刻的时域格林函数,τ=t-t表示信号的时间反转,x表示成像区域中各点的位置, ρj表示传感器xj到x的距离,c
p
为兰姆波传播的相速度;
[0027]
在频率域中,相应的互相关成像条件为:
[0028][0029]
公式(5)中,符号*表示复共轭,为从发射源到成像区域各 点的正向传播声场,其中f(ω)为发射信号的傅里叶变换,为
频域 格林函数,|x-xi|表示传感器xi到成像区域x内的距离,为波数;i
ij
(x)是由一对发 射-接收传感器组成的图像;
[0030]
将所有不同发射-接收器组成的图像求和,即获得检测区域的二维图像,得到检测区域 的风电叶片的内部图像。
[0031]
一种实施方案,所述超声波信号激励单元包括依次信号连接的高频脉冲信号发生器、 脉冲信号变压器和高频功率放大器,且所述功率高频功率放大器与超声阵列传感器的发射 端信号连接;步骤s2中,设定好高频脉冲信号发生器的激振频率,启动高频脉冲信号发生 器激发超声脉冲波,然后通过脉冲信号变压器和高频功率放大器将超声脉冲波传送阵列超 声传感器的发射端,然后通过阵列超声传感器的发射端向风电叶片输入振动能量。
[0032]
一种实施方案,所述超声波信号接收单元包括信号连接的信号放大器和带通滤波器, 且所述信号放大器与阵列超声传感器的接收端信号连接,所述带通滤波器与工业计算机信 号连接;步骤s2中,超声波信号接收单元通过信号放大器和带通滤波器依次对接受的回波 信号进性放大和滤波处理。
[0033]
一种实施方案,所述阵列超声传感器为干点接触式阵列超声传感器。
[0034]
一种优选方案,所述干点接触式阵列超声传感器包括阵列超声传感器外壳,所述阵列 超声传感器外壳顶部与电动伸缩架相连,所述阵列超声传感器外壳内设有多个呈阵列排布 的干点接触式传感器,呈阵列排布的干点接触式传感器中,其中一组干点接触式传感器发 射超声波,其余干点接触式传感器接收超声波,发射超声波的干点接触式传感器为发射传 感器,发射传感器即为阵列超声传感器的发射端,接收超声波的干点接触式传感器为接收 传感器,接收传感器即为阵列超声传感器的接收端。
[0035]
一种优选方案,所述干点接触式传感器包括干点接触式传感器壳体,所述干点接触式 传感器壳体内自下而上依次设有横波探头、弹簧下挡块、压缩弹簧和弹簧上挡块,所述横 波探头的下端穿过干点接触式传感器壳体和阵列超声传感器外壳并位于干点接触式传感器 壳体和阵列超声传感器外壳的下方。
[0036]
一种优选方案,所述阵列超声传感器外壳包括开口向下的上盖板,所述上盖板罩设于 干点接触式传感器的顶端,所述上盖板的左右两侧分别竖直设有侧面锁紧板,所述上盖板 的正下方设有底座,所述底座的左右两端分别与侧面锁紧板相连,所述上盖板上设有与干 点接触式传感器数量相匹配的引线孔。
[0037]
一种实施方案,所述巡检车的顶部设有移动电源。
[0038]
相较于现有技术,本发明的有益技术效果在于:
[0039]
本发明提供的基于超声波实现风电叶片缺陷自动检测的方法,通过采用阵列超声传感 器配合超声波发射接收仪对风电叶片缺陷进行数据采集,利用超声波衰减小,传播距离远, 信号易于接收等优点,有利于之后信号的处理与分析,有效简化了后续信号处理与分析操 作的程序,可实现对风电叶片缺陷的自动检测并对缺陷位置进行定位,具有检测速度快、 检测精度高、检测结果基本不受外界环境影响等优点,可为风电叶片的安全使用、及时预 警提供有力保障;因此,本发明相对于现有技术,具有显著进步性和应用价值。
附图说明
[0040]
图1是本发明实施例中所述的逆时偏移缺陷成像原理图;
[0041]
图2是本发明实施例中提供的一种基于超声波实现风电叶片缺陷自动检测的装置的结 构示意图;
[0042]
图3是本发明实施例中提供的基于超声波实现风电叶片缺陷自动检测的装置的使用示 意图;
[0043]
图4是本发明实施例中所述的阵列超声传感器的结构示意图;
[0044]
图5是本发明实施例中所述的超声波发射接收仪、阵列超声传感器和工业计算机的工 作原理图;
[0045]
图中标号示意如下:1、风电叶片;2、巡检车;21、车架;221、安装槽;22、车轮; 23、轮轴;3、摄像机;4、超声波发射接收仪;5、电动伸缩架;6、阵列超声传感器;61、 阵列超声传感器外壳;611、上盖板;6111、引线孔;612、侧面锁紧板;613、底座;62、 干点接触式传感器;621、干点接触式传感器壳体;622、横波探头;623、弹簧下挡块;624、 压缩弹簧;625、弹簧上挡块;7、移动电源。
具体实施方式
[0046]
以下将结合附图和实施例对本发明的技术方案做进一步清楚、完整地描述。
[0047]
实施例
[0048]
本发明所述的基于超声波实现风电叶片缺陷自动检测的方法,包括如下步骤:
[0049]
s1、使巡检车行驶至需要缺陷检测的风电叶片内(可通过电动伸缩架调节好阵列超声 传感器在风电叶片上的位置,并调节好阵列超声传感器的采集方向);
[0050]
s2、随着巡检车的移动,超声波发射接收仪的超声波信号激励单元产生超声波脉冲信 号并通过阵列超声传感器的发射端向风电叶片输入振动能量(具体的,设定好高频脉冲信 号发生器的激振频率,启动高频脉冲信号发生器即可激发超声脉冲波,然后通过脉冲信号 变压器和高频功率放大器将超声脉冲波传送阵列超声传感器的发射端,然后通过阵列超声 传感器的发射端向风电叶片输入振动能量),使产生频率为20~100khz范围内的超声波; 阵列超声传感器的接收端采集声波回波信号并将其传输给超声波发射接收仪的超声波信号 接收单元,超声波信号接收单元接受回波信号并对信号进行预处理(可通过信号放大器和 带通滤波器依次对接受的回波信号进性放大和滤波处理)并将预处理后的回波信号传递给 工业计算机;
[0051]
s3、由计算机采用matlab软件对接收的散射回波信号进行数据存储和信号处理,然 后依据逆时偏移成像算法进行成像处理,得到检测区域的风电叶片的内部图像,将获取的 图像与标准图像比较,即可判断风电叶片是否存在缺陷,当判断结果显示存在缺陷时,巡 检车停止行驶,摄像机对缺陷位置进行拍照,从而完成风电叶片缺陷的自动化检测并对缺 陷位置进行定位,具体如下:
[0052]
所述阵列超声传感器是由若干超声传感器呈阵列组成,所述阵列超声传感器采用一发 多收的模式,由一组超声传感器发射超声波,其余超声传感器接收超声波,将发射超声波 的传感器称之为发射传感器,也相当于阵列超声传感器的发射端,把接收超声波的传感器 称之为接收传感器,也相当于阵列超声传感器的接收端;
[0053]
假设风电叶片存在一个缺陷,则由超声波信号激励单元和发射传感器发射的超声波在 缺陷位置处会发生散射,从而产生散射源,我们将散射源位置定义为缺陷位置a,将非散射 源位置定义为非缺陷位置b,将接收传感器r的位置定义为o,将超声波在缺陷位置散射 后产生的散射源定义为波源s;
[0054]
时间反转信号处理聚焦技术是本发明采用的逆时偏移成像算法的基础,可满足声波的 互易性原理,且可有效地实现声源信号的重构,具体过程为:
[0055]
通过耦合在结构表面的压电传感器实现信号的加载和接收,在接收位置处将信号在时 域上反转并激励,使得信号先到后发、后到后发,最终同时回到波源处,即信号能够在最 初的激励点处被聚焦,将由缺陷产生的散射信号看作为二次“激励源”,利用时间反转方法重 建激励源信号;
[0056]
所述逆时偏移成像算法基于惠更斯原理,即波阵面上所有的点都可视作球面波的第二 波源,本实施例中,如图1所示,波源s出发的波阵面信号在时刻t传播至接收传感器r并 被记录下来,再利用记录的散射波信号向波源s回传,声波速度为v,经过时间δt沿声波 传播方向回传vδt距离至t-δt时刻波阵面;
[0057]
设a的位移场经路径ao传播至o处的位移场为:
[0058][0059]
公式(1)中,表示波源s出发的波阵面信号从散射源a处经路径ao传播至o 处的位移场,表示散射源a的位移场,^表示时域声位移场的傅里叶变换, 为传递函数,a
ao
(ω)表示幅值,ρ
ao
表示ao的长度,k表示为波数;
[0060]
则o位置处位移场时间反转后,经路径oa传播至a处的位移场为:
[0061][0062]
公式(2)中符号*表示复共轭,ao与oa路径相同,则ρ
ao
=ρ
oa
,g
oa
(ω)=g
ao
(ω), 公式中g
ao*
(ω)g
ao
(ω)一项是实、偶、正函数,它在时间零点的傅里叶反变换是同相迭加的, 会得到主相关峰值,这样回传出的波形幅值上得到增强;
[0063]
则o位置处位移场时间反转后,经路径ob传播至b处的位移场为:
[0064][0065]
公式(3)中,表示相移分量,在时间零点傅里叶反变换并不能同相迭加,不 能得到主相关峰值,幅值不会得到聚焦;
[0066]
本发明中,由于实际缺陷检测过程中并不知道缺陷位置,但是o位置处位移场可以由 接收传感器接收得到,时间反转处理后反向传播聚焦出缺陷位置,此外,a位置处的位移场 为它是由激励信号传播至a位置后与缺陷相互散射产生,因此散射信号与入射场信 号有很强的相关性,利用入射场信息可以明显提高缺陷重构效果;
[0067]
本实施例中的逆时偏移算法包含以下三个步骤:i)单一发射源的声场正演传播;ii)各 个接收传感器接收到散射波场时间反转后逆向回传外推;iii)监测空间域互相关成像;第一 步在发射传感器xi处激发,在成像区域正演出各个点的位移场;第二步是将接收传感器xj处频率域上的散射波场取共轭后逆向回传外推,得到成像区域各个点的位移场;第三步是 在成像区域各点正演出的位移场与回传外推得到的位移场互相关处理,得出部分图像;再 选取另外一个发射传感器发射并重复上述三个步骤,不同部分图像合成出最终图像,传播 过程均运用格林函数进行传播,得到成像区域不同点处的位移场;
[0068]
因此,本实施例中,假设由一对发射-接收传感器沿时间长度(0,t)记录的散射场经 由逆向外推后的位移场为:
[0069][0070]
公式(4)中,ρj=|x-xj|,代表由xj接收传感器位 置,t=0时刻的时域格林函数,τ=t-t表示信号的时间反转,x表示成像区域中各点的位置, ρj表示传感器xj到x的距离,c
p
为兰姆波传播的相速度;
[0071]
在频率域中,相应的互相关成像条件为:
[0072][0073]
公式(5)中,符号
*
表示复共轭,为从发射源到成像区域各 点的正向传播声场,其中f(ω)为发射信号的傅里叶变换,为
频域 格林函数,|x-xi|表示传感器xi到成像区域x内的距离,为波数;i
ij
(x)是由一对发 射-接收传感器组成的图像;
[0074]
将所有不同发射-接收器组成的图像求和,即可获得检测区域的二维图像,得到检测区 域的风电叶片的内部图像。
[0075]
请参阅图2至图5所示:一种基于超声波实现风电叶片缺陷自动检测的装置,包括与 风电叶片1相适配的巡检车2,所述巡检车2包括车架21和对称设于车架21左右两侧的车 轮22,各车轮22分别通过各自的轮轴23与车架21转动连接,所述车架21的前端设有摄 像机3,所述车架21的顶部设有超声波发射接收仪4,所述超声波发射接收仪4包括超声 波信号激励单元和超声波信号接收单元,所述车架21的底部设有安装槽211,所述安装槽211内设有可竖直方向伸缩的电动伸缩架5,所述电动伸缩架5的底部设有阵列超声传感器 6,所述阵列超声传感器6通过电动伸缩架5与车架21相连,所述阵列超声传感器6的发 射端与超声波信号激励单元信号连接,阵列超声传感器6的接收端与超声波信号接收单元 信号连接,且所述超声波信号接收单元信号连接有工业计算机。
[0076]
本实施例中,所述超声波发射接收仪4采用市售产品即可。所述超声波发射接收仪4 的超声波信号激励单元用于激发超声脉冲波,所述超声波发射接收仪4的超声波信号接收 单元用于接收回波信号并对信号进行预处理。
[0077]
本实施例中,所述电动伸缩架5采用市售产品即可。所述电动伸缩架5用于调整阵列 超声传感器6的位置,只要其能够在竖直方向上可以自动伸缩即可。
[0078]
本实施例中,所述阵列超声传感器6采用市售产品即可。阵列超声传感器6具有发射 端和接收端,具备一发多收的功能,由于超声波在密度不同的介质中传播速度不同,当其 通过两种不同介质的分界面时,会发生散射折射等现象。具体的,所述阵列超声传感器6 为干点接触式阵列超声传感器。
[0079]
请再参阅图4所示,所述干点接触式阵列超声传感器6包括阵列超声传感器外壳61, 所述阵列超声传感器外壳61顶部与电动伸缩架5相连,所述阵列超声传感器外壳61内设 有多个呈阵列排布的干点接触式传感器62,呈阵列排布的干点接触式传感器62中,其中一 组干点接触式传感器62发射超声波,其余干点接触式传感器62接收超声波,发射超声波 的干点接触式传感器为发射传感器,发射传感器即为阵列超声传感器6的发射端,接收超 声波的干点接触式传感器为接收传感器,接收传感器即为阵列超声传感器6的接收端。
[0080]
进一步的,所述干点接触式传感器62包括干点接触式传感器壳体621,所述干点接触 式传感器壳体621内自下而上依次设有横波探头622、弹簧下挡块623、压缩弹簧624和弹 簧上挡块625,所述横波探头622的下端(即探头触点)穿过干点接触式传感器壳体621和 阵列超声传感器外壳61并位于干点接触式传感器壳体622和阵列超声传感器外壳61的下 方,弹簧下挡块623与干点接触式传感器壳体622的内壁活动连接,弹簧上挡块625与干 点接触式传感器壳体622的内壁固定连接。这样,横波探头622可以随着压缩弹簧624的 伸缩而上下弹性移动。所述阵列超声传感器中6中干点接触式传感器62的横波探头622(即 超声探头)为核心部件,尽管它使用时仍需要与被检测物体表面相接触,但是无需耦合剂, 消除了因耦合剂涂抹不均匀对测量结果造成的影响,此外,横波探头622与被检测物体表 面相接触的尖端是由耐磨陶瓷材料做成,在表面略显粗糙的被检测物体上也能准确实现检 测功
能。总体上,本实施例采用的干点接触式阵列超声传感器6对风电叶片1进行缺陷检 测时,可以省去耦合剂的使用,减少检测过程中的不稳定性,同时也保证了超声波能量可 以更多的入射到风电叶片1内部,探头触点与风电叶片1之间弹性耦合,解决了风电叶片1 内部非平坦状态的问题。
[0081]
所述阵列超声传感器外壳61包括开口向下的上盖板611,所述上盖板611罩设于干点 接触式传感器62的顶端,所述上盖板611的左右两侧分别竖直设有侧面锁紧板612,所述 上盖板611的正下方设有底座613,所述底座613的左右两端分别与侧面锁紧板612相连, 所述上盖板611上设有与干点接触式传感器62数量相匹配的引线孔6111。
[0082]
具体的,如图4所示,所述超声波信号激励单元包括依次信号连接的高频脉冲信号发 生器、脉冲信号变压器和高频功率放大器,且所述功率高频功率放大器与超声阵列传感器6 的发射端信号连接。所述超声波信号接收单元包括信号连接的信号放大器和带通滤波器, 且所述信号放大器与阵列超声传感器6的接收端信号连接,所述带通滤波器与工业计算机 信号连接。
[0083]
本实施例中,所述巡检车1的顶部设有移动电源7,以实现对所述装置进行移动供电。
[0084]
由上所述可见:本发明采用阵列超声传感器6配合超声波发射接收仪4进行信号采集, 使得信号采集方式为多阵元结构的信号采集方式,不仅信号采集更加自由,操作更为简单、 快捷,有效提高了信号采集效率,同时还有效提高了信号采集过程中的信噪比,使得信号 采集过程中灵敏度高、不易受外界条件干扰,采集的信号传递给工业计算机进行分析处理, 如此即可实现风电叶片1缺陷的无损检测,此外,检测过程中,通过摄像机3对缺陷位置 进行实时定位,检测速度快、检测精度高,可在短时间内进行远距离的检测作业,且检测 结果基本不受外界环境影响,使得检测和维护工作效率得到大幅度提高,能为风电叶片的 安全运营、及时维护提供有力支撑。
[0085]
最后有必要在此指出的是:以上所述仅为本发明较佳的具体实施方式,但本发明的保 护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻 易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
