技术特征:
1.一种高效的长时大尺度slam方法,其特征在于:对机器视觉所接收到的图像抽象和表达为不同层级的信息;越高层的信息单个存储量越低,越低层的信息单个存储量越高;越高层的信息编号越多;越低层的信息编号越少。2.一种高效的长时大尺度slam方法,其特征在于,包括如下步骤:s100,建立关键帧的信息层级序列:关键帧的信息层级序列,按照层级逐级降低的顺序,表达为:第1层级信息、第2层级信息、第j层级信息
………
、第k层级信息:s200,确定关键帧的各个信息层级的存储量:第1层级信息的存储量为q1,第2层级信息的存储量为q2…………
第j层级信息的存储量为q
j
…………
第k层级信息的存储量为q
k
:对于q1~q
k
而言,有:q1>q2>
……
q
j-1
>q
j
>
……
q
k
;s300,当前关键帧为第y个关键帧,从第y个关键帧提取第1~k层的信息:x
1,y
、x
2,y
、
……
x
j,y
、
……
x
k,y
;同时计算第y个关键帧提取第1~k层的信息的存储重要性系数:z
1,y
、z
2,y
、
……
z
j,y
、
……
z
k,y
;x
1,y
、x
2,y
、
……
x
j,y
、
……
x
k,y
分别表示:第y个关键帧的第1层级信息,第y个关键帧的第2层级信息
、
……
第y个关键帧的第j层级信息
、
……
第y个关键帧的第k层级信息;z
1,y
、z
2,y
、
……
z
j,y
、
……
z
k,y
分别表示:第y个关键帧的第1层级信息的存储重要性系数,第y个关键帧的第2层级信息的存储重要性系数
、
……
第y个关键帧的第j层级信息的存储重要性系数
、
……
第y个关键帧的第k层级信息的存储重要性系数;s400,将当前第y个关键帧提取的第1~k层的信息的存储重要性系数:z
1,y
、z
2,y
、
……
z
j,y
、
……
z
k,y
加入到当前的关键帧层级信息的存储重要性系数矩阵中;s500,将当前第y个关键帧提取的第1~k层的信息:x
1,y
、x
2,y
、
……
x
j,y
、
……
x
k,y,
加入到当前的关键帧层级信息矩阵中:当0<y≤q
k
时,将第y个关键帧的提取的第1~k层级信息全部存储进入当前关键帧集合中;上述步骤采用下式表达为:x
j,i
表达第i个关键帧的第j层级信息;当q
j
<y≤q
j-1
时,j表示2至k的任意自然数;将第y个关键帧的第1~j-1层级信息全部存储进入当前关键帧集合中,上述步骤采用下式表达为:
对于第y个关键帧的第j~k层级信息而言,逐层进行计算,决定是否存储:对于第j~k层中的任意第β层而言:首先,从z
β,1
,z
β,2
……
z
β,i
……
z
β,y-1
,寻找取最小值,其采用z
β,m
来表示,即第m个关键帧第β层级信息存储重要性参数最小;其次,根据z
β,m
、z
β,y
的大小,决定是否存储第y个关键帧的第β层级信息x
β,y
:当z
β,m
>z
β,y
则z
β,y
赋予新的数值,使得z
β,y
不再参与排序;x
β,y
赋予新的数值null或者0,即将第y个关键帧的第β层级信息不存储;当z
β,m
≤z
β,y
则z
β,m
赋予新的数值,使得z
β,m
不再参与排序;x
β,m
赋予新的数值null或者0,即将第m个关键帧的第β层级信息删去,将第y个关键帧的第β层级信息x
β,y
存储,即将第m个关键帧的第β层级信息的存储空间让与第y个关键帧的第β层级信息存储空间,即第β层级信息的存储量始终保持在q
β
;当q1<y时:对于第y个关键帧的第1~k层级信息而言,逐层进行计算,决定是否存储:对于第1~k层中的任意第β层而言,首先,从z
β,1
,z
β,2
……
z
β,i
……
z
β,y-1
,寻找取最小值,其采用z
β,m
来表示,即第m个关键帧第β层级信息存储重要性参数最小;其次,根据z
β,m
、z
β,y
的大小,决定是否存储第y个关键帧的第β层级信息x
β,y
:当z
β,m
>z
β,y
则z
β,y
赋予新的数值,使得z
β,y
不再参与排序;x
β,y
赋予新的数值null或者0,即将第y个关键帧的第β层级信息不存储;当z
β,m
≤z
β,y
则z
β,m
赋予新的数值,使得z
β,m
不再参与排序;x
β,m
赋予新的数值null或者0,即将第m个关键帧的第β层级信息删去,将第y个关键帧的第β层级信息x
β,y
存储,即将第m个关键帧的第β层级信息的存储空间让与第y个关键帧的第β层级信息存储空间,即第β层级信息的存储量始终保持在q
β
。3.根据权利要求2所述的一种高效的长时大尺度slam方法,其特征在于,步骤s500中的“当z
β,m
>z
β,y
,z
β,y
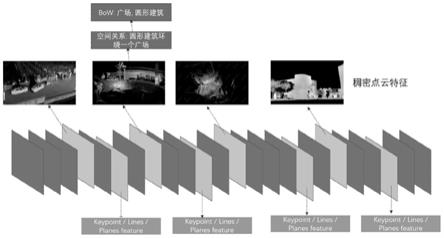
赋予新的数值”,赋予null或者 ∞。4.根据权利要求2或3所述的一种高效的长时大尺度slam方法,其特征在于,步骤s100中,4≤k。5.一种slam方法,其特征在于,对关键帧集合的信息进行分层处理;包括以下步骤:s100,建立关键帧集合的信息层级序列:第1层级信息:场景的特征词集合;第2层级信息:空间实体的空间关系表达;
第3层级信息:点/线/面特征;第4层级信息:稠密点云特征;s200,根据步骤s100建立的信息层级序列建立关键帧集合的信息的存储优先级:层级高的信息级别的存储量大于层级低的信息级别的存储量,且层级高的信息级别的存储时间大于层级低的信息级别的存储时间;s300,当前关键帧为第y个关键帧,从第y个关键帧提取第1~4层的信息:x
1,y
、x
2,y
、x
3,y
、x
k,y
;同时计算第y个关键帧提取第1~k层的信息的存储重要性系数:z
1,y
、z
2,y
、z
3,y
、z
k,y
;存储重要性系数的计算原则;x
1,y
、x
2,y
、x
3,y
、x
4,y
分别表示:第y个关键帧的第1层级信息,第y个关键帧的第2层级信息、第y个关键帧的第3层级信息、第y个关键帧的第4层级信息;z
1,y
、z
2,y
、z
3,y
、z
4,y
分别表示:第y个关键帧的第1层级信息的存储重要性系数、第y个关键帧的第2层级信息的存储重要性系数、第y个关键帧的第3层级信息的存储重要性系数、第y个关键帧的第4层级信息的存储重要性系数;s400,将当前第y个关键帧提取的第1~4层的信息的存储重要性系数:z
1,y
、z
2,y
、z
3,y
、z
4,y
加入到当前的关键帧层级信息的存储重要性系数矩阵中:将第y个关键帧的提取的第1~4层级信息的存储重要性参数全部存储进入当前的关键帧层级信息的存储重要性系数矩阵;上述步骤采用下式表达为:s500,将当前第y个关键帧提取的第1~4层的信息:x
1,y
、x
2,y
、x
3,y
、x
4,y,
加入当前的关键帧层级信息矩阵中:将当前第y个关键帧提取的第1~4层的信息:x
1,y
、x
2,y
、x
3,y
、x
4,y,
加入到当前的关键帧层级信息矩阵中:当0<y≤q4时,将第y个关键帧的提取的第1~4层级信息全部存储进入当前关键帧集合中;上述步骤采用下式表达为:当q
j
<y≤q
j-1
时,将第y个关键帧的第1~j-1层级信息全部存储进入当前关键帧集合中,上述步骤采用下式表达为:
对于第y个关键帧的第j~4层级信息而言,逐层进行计算,决定是否存储:对于第j~4层中的任意第β层而言,首先,从z
β,1
,z
β,2
……
z
β,i
……
z
β,y-1
,寻找取最小值,其采用z
β,m
来表示,即第m个关键帧第β层级信息存储重要性参数最小;其次,根据z
β,m
、z
β,y
的大小,决定是否存储第y个关键帧的第β层级信息x
β,y
:当z
β,m
>z
β,y
则z
β,y
赋予新的数值null或者 ∞,使得z
β,y
不再参与排序;x
β,y
赋予新的数值null或者0,即将第y个关键帧的第β层级信息不存储;当z
β,m
≤z
β,y
则z
β,m
赋予新的数值,使得z
β,m
不再参与排序;x
β,m
赋予新的数值null或者0,即将第m个关键帧的第β层级信息删去,将第y个关键帧的第β层级信息x
β,y
存储,即将第m个关键帧的第β层级信息的存储空间让与第y个关键帧的第β层级信息存储空间;当q1<y时:对于第y个关键帧的第1~4层级信息而言,逐层进行计算,决定是否存储:对于第1~4层中的任意第β层而言,首先,从z
β,1
,z
β,2
……
z
β,i
……
z
β,y-1
,寻找取最小值,其采用z
β,m
来表示,即第m个关键帧第β层级信息存储重要性参数最小;其次,根据z
β,m
、z
β,y
的大小,决定是否存储第y个关键帧的第β层级信息x
β,y
:当z
β,m
>z
β,y
则z
β,y
赋予新的数值null或者 ∞,使得z
β,y
不再参与排序;x
β,y
赋予新的数值null或者0,即将第y个关键帧的第β层级信息不存储;当z
β,m
≤z
β,y
则z
β,m
赋予新的数值,使得z
β,m
不再参与排序;x
β,m
赋予新的数值null或者0,即将第m个关键帧的第β层级信息删去,将第y个关键帧的第β层级信息x
β,y
存储,即将第m个关键帧的第β层级信息的存储空间让与第y个关键帧的第β层级信息存储空间。6.根据权利要求5所述的一种slam方法,其特征在于,步骤s300中,十字路口的存储重要性系数定位1.0,丁字路口的存储重要性系数定位0.8,路中间的存储重要性系数定位0.5。
技术总结
本发明公开了一种SLAM方法;属于可移动平台同步定位与地图构建这一领域;其技术要点在于:对机器视觉所接收到的图像抽象和表达为不同层级的信息;越高层的信息单个存储量越低,越低层的信息单个存储量越高;越高层的信息编号越多;越低层的信息编号越少。采用本发明的一种高效的长时大尺度SLAM方法,达到长时大尺度SLAM下回环检测的性能与高效性。度SLAM下回环检测的性能与高效性。度SLAM下回环检测的性能与高效性。
技术研发人员:任杰
受保护的技术使用者:元橡科技(苏州)有限公司
技术研发日:2021.06.15
技术公布日:2022/3/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。