1.本发明涉及自动控制领域,尤其涉及一种一次投食剂量现场解析平台。
背景技术:
2.在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用。自动控制是指在没有人直接参与的情况下,利用外加的设备或装置(称控制装置或控制器),使机器,设备或生产过程(统称被控对象)的某个工作状态或参数(即被控制量)自动地按照预定的规律运行。
3.自动控制理论是研究自动控制共同规律的技术科学。它的发展初期,是以反馈理论为基础的自动调节原理,主要用于工业控制,为了设计和制造飞机及船用自动驾驶仪,火炮定位系统,雷达跟踪系统以及其他基于反馈原理的军用设备,进一步促进并完善了自动控制理论的发展。
4.当前,在大象喂食区域中,不同象体一次进食的饲料体积不同,如果对于所有象体执行相同体积的饲料的一次性喂食,对于体形较小的象体,则会造成饲料的浪费,相反,对于体形较大的象体,相当于变相增加了喂食次数和喂食时间。
技术实现要素:
5.为了解决现有技术中的技术问题,本发明提供了一种一次投食剂量现场解析平台,能够基于预览图像中的象鼻参数确定是否执行高解析度高帧率的图像监控模式,尤为重要的是,基于当前最近的象体的体型参数智能选择对应的一次投食饲料的剂量,从而提升现场喂食效率。
6.为此,本发明需要具备以下几处关键的发明点:
7.(1)在预览图像中存在较近象鼻对象时,才从低解析度低帧率的图像监控模式转换到高解析度高帧率的图像监控模式,从而减少现场功耗的浪费;
8.(2)根据当前监控图像中面积最大的象体占据的面积比例智能选择选择对应的一次投食饲料的剂量以满足不同体形的象体的不同喂食需求。
9.根据本发明的一方面,提供了一种一次投食剂量现场解析平台,所述平台包括:
10.预览获取机构,用于在现场监控机构反馈的预览图像中存在满足预设条件的对象时,发出第一操控指令;
11.现场监控机构,设置在象体生活场所,位于饲料喂食机构附近,用于对所述饲料喂食机构周围环境执行监控操作,以获得当前时间戳对应的第一监控图像;
12.分列处理设备,与所述现场监控机构连接,用于获取所述第一监控图像中的各个像素列,获取每一个像素列的各个像素点的各个像素值的标准差,并在所述标准差未超过预设标准差阈值时,对像素列执行内容锐化处理,在所述标准差超过所述预设标准差阈值时,不对像素列执行内容锐化处理,以获得对应的处理像素列;
13.比例辨识设备,与所述分列处理设备连接,用于将各个处理像素列构成的图像作
为所述第一监控图像对应的分列处理图像,在所述分列处理图像中基于象体外形轮廓检测一个以上象体图像分块,将面积最大的象体图像分块在所述分列处理画面中占据的面积比例作为象体所在比例输出;
14.体积解析设备,与所述比例辨识设备连接,用于确定与所述象体所在比例单调正相关的一次投食体积;
15.饲料喂食机构,与所述体积解析设备连接,用于将与所述一次投食体积相符的饲料投放到所述现场监控机构前方;
16.其中,在所述现场监控机构中,所述第一监控图像的解析度低于预设解析度限量;
17.其中,所述现场监控机构还用于在接收到所述第一操控指令时,对所述饲料喂食机构周围环境执行监控操作,以获得当前时间戳对应的第二监控图像,所述第二监控图像的解析度大于等于所述预设解析度限量;
18.其中,在现场监控机构反馈的预览图像中存在满足预设条件的对象时,发出第一操控指令包括:在现场监控机构反馈的预览图像中存在面积超限的象鼻对象时,发出第一操控指令;
19.其中,在现场监控机构反馈的预览图像中存在满足预设条件的对象时,发出第一操控指令还包括:在现场监控机构反馈的预览图像中存在景深值小于等于预设景深阈值的象鼻对象时,发出第一操控指令。
20.根据本发明的另一方面,还提供了一种一次投食剂量现场解析方法,所述方法包括使用一种如上述的一次投食剂量现场解析平台,用于根据当前成像面积最大的象体对象的实体参数智能化选择对应的一次投食饲料的剂量。
21.本发明的一次投食剂量现场解析平台结构紧凑、操作方便。由于能够基于预览图像中的象鼻参数确定是否执行高解析度高帧率的图像监控模式,同时基于当前最近的象体的体型参数智能选择对应的一次投食饲料的剂量,从而满足不同体形的象体喂食需求。
附图说明
22.以下将结合附图对本发明的实施方案进行描述,其中:
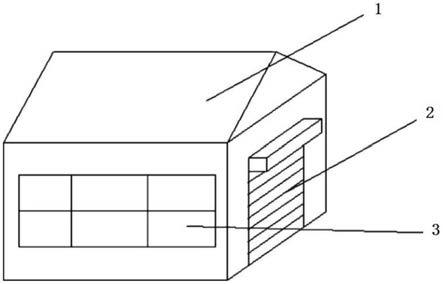
23.图1为根据本发明实施方案示出的一次投食剂量现场解析平台所应用的象体生活圈体的外形结构图。
具体实施方式
24.下面将参照附图对本发明的一次投食剂量现场解析平台的实施方案进行详细说明。
25.当前,在大象喂食区域中,不同象体一次进食的饲料体积不同,
26.如果对于所有象体执行相同体积的饲料的一次性喂食,对于体形较小的象体,则会造成饲料的浪费,
27.相反,对于体形较大的象体,相当于变相增加了喂食次数和喂食时间。
28.为了克服上述不足,本发明搭建了一种一次投食剂量现场解析平台,能够有效解决相应的技术问题。
29.图1为根据本发明实施方案示出的一次投食剂量现场解析平台所应用的象体生活
圈体的外形结构图。
30.其中,在图1中,1为象体生活圈体的圈体主结构,2为象体生活圈体的窗口阵列,3为象体生活圈体的自动门体。
31.根据本发明实施方案示出的一次投食剂量现场解析平台包括:
32.预览获取机构,用于在现场监控机构反馈的预览图像中存在满足预设条件的对象时,发出第一操控指令;
33.现场监控机构,设置在象体生活场所,位于饲料喂食机构附近,用于对所述饲料喂食机构周围环境执行监控操作,以获得当前时间戳对应的第一监控图像;
34.分列处理设备,与所述现场监控机构连接,用于获取所述第一监控图像中的各个像素列,获取每一个像素列的各个像素点的各个像素值的标准差,并在所述标准差未超过预设标准差阈值时,对像素列执行内容锐化处理,在所述标准差超过所述预设标准差阈值时,不对像素列执行内容锐化处理,以获得对应的处理像素列;
35.比例辨识设备,与所述分列处理设备连接,用于将各个处理像素列构成的图像作为所述第一监控图像对应的分列处理图像,在所述分列处理图像中基于象体外形轮廓检测一个以上象体图像分块,将面积最大的象体图像分块在所述分列处理画面中占据的面积比例作为象体所在比例输出;
36.体积解析设备,与所述比例辨识设备连接,用于确定与所述象体所在比例单调正相关的一次投食体积;
37.饲料喂食机构,与所述体积解析设备连接,用于将与所述一次投食体积相符的饲料投放到所述现场监控机构前方;
38.其中,在所述现场监控机构中,所述第一监控图像的解析度低于预设解析度限量;
39.其中,所述现场监控机构还用于在接收到所述第一操控指令时,对所述饲料喂食机构周围环境执行监控操作,以获得当前时间戳对应的第二监控图像,所述第二监控图像的解析度大于等于所述预设解析度限量;
40.其中,在现场监控机构反馈的预览图像中存在满足预设条件的对象时,发出第一操控指令包括:在现场监控机构反馈的预览图像中存在面积超限的象鼻对象时,发出第一操控指令;
41.其中,在现场监控机构反馈的预览图像中存在满足预设条件的对象时,发出第一操控指令还包括:在现场监控机构反馈的预览图像中存在景深值小于等于预设景深阈值的象鼻对象时,发出第一操控指令。
42.接着,继续对本发明的一次投食剂量现场解析平台的具体结构进行进一步的说明。
43.所述一次投食剂量现场解析平台中:
44.所述预览获取机构还用于在现场监控机构反馈的预览图像中不存在满足预设条件的对象时,发出第二操控指令包括:在现场监控机构反馈的预览图像中不存在景深值小于等于预设景深阈值的象鼻对象且不存在面积超限的象鼻对象时,发出第二操控指令。
45.所述一次投食剂量现场解析平台中:
46.所述预览获取机构还用于在现场监控机构反馈的预览图像中不存在满足预设条件的对象时,发出第二操控指令。
47.所述一次投食剂量现场解析平台中:
48.所述现场监控机构还用于在接收到所述第二操控指令时,维持对所述饲料喂食机构周围环境执行监控操作,以获得当前时间戳对应的第一监控图像。
49.所述一次投食剂量现场解析平台中:
50.所述现场监控机构在接收到所述第一操控指令时的拍摄帧率大于在接收到所述第二操控指令时的拍摄帧率。
51.所述一次投食剂量现场解析平台中:
52.所述现场监控机构在接收到所述第一操控指令时的拍摄帧率大于在接收到所述第二操控指令时的拍摄帧率包括:所述现场监控机构在接收到所述第一操控指令时的拍摄帧率是在接收到所述第二操控指令时的拍摄帧率的两倍以上。
53.所述一次投食剂量现场解析平台中:
54.所述现场监控机构在接收到所述第一操控指令时的拍摄帧率大于在接收到所述第二操控指令时的拍摄帧率包括:所述现场监控机构在接收到所述第一操控指令时的拍摄帧率是在接收到所述第二操控指令时的拍摄帧率的三倍以上。
55.所述一次投食剂量现场解析平台中:
56.所述分列处理设备包括分列提取单元、标准差识别单元、阈值比对单元和内容锐化单元;
57.其中,在所述分列处理设备中,所述分列提取单元、所述标准差识别单元、所述阈值比对单元和所述内容锐化单元顺序相连。
58.同时,为了克服上述不足,本发明还搭建了一种一次投食剂量现场解析方法,所述方法包括使用一种如上述的一次投食剂量现场解析平台,用于根据当前成像面积最大的象体对象的实体参数智能化选择对应的一次投食饲料的剂量。
59.另外,在所述一次投食剂量现场解析平台中,所述体积解析设备为 cpld器件。cpld即复杂可编程逻辑器件,是从pal和gal器件发展出来的器件,相对而言规模大,结构复杂,属于大规模集成电路范围。是一种用户根据各自需要而自行构造逻辑功能的数字集成电路。其基本设计方法是借助集成开发软件平台,用原理图、硬件描述语言等方法,生成相应的目标文件,通过下载电缆(“在系统”编程)将代码传送到目标芯片中,实现设计的数字系统。cpld主要是由可编程逻辑宏单元(mc,macro cell)围绕中心的可编程互连矩阵单元组成。其中mc结构较复杂,并具有复杂的i/o 单元互连结构,可由用户根据需要生成特定的电路结构,完成一定的功能。由于cpld内部采用固定长度的金属线进行各逻辑块的互连,所以设计的逻辑电路具有时间可预测性,避免了分段式互连结构时序不完全预测的缺点。
60.尽管参照本发明的示例性实施例已经示出并说明了本发明的实施例,但本领域普通技术人员应当理解,在不脱离以下权利要求所限定的本发明实施例的精神和范围的情况下,可以对形式和细节进行各种修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。