技术特征:
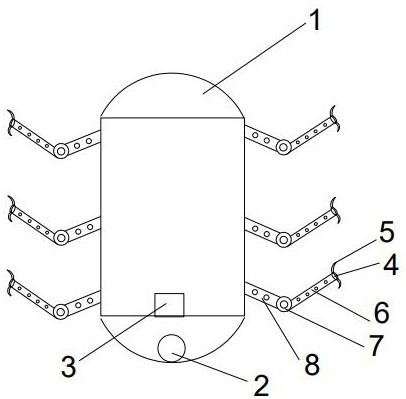
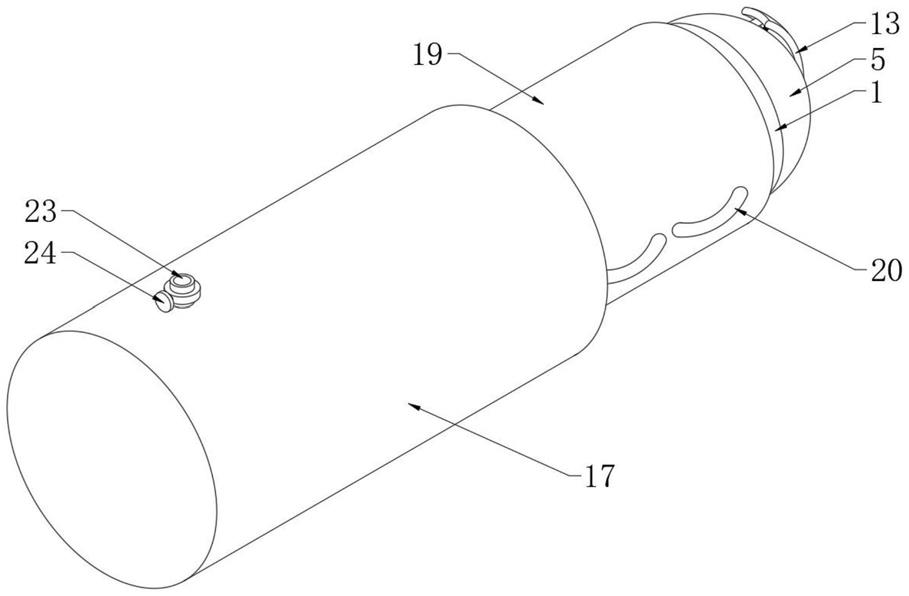
1.一种适用于水下潜行的六足机器人,其特征在于,包括:防水壳体(1)、摄像头(2)、声呐(3)、左前足、左中足、左后足、右前足、右中足、右后足、气动装置(9)、气囊(10)、控制系统(11),所述防水壳体(1)的内部设有摄像头(2)、声呐(3)、气动装置(9)、气囊(10)、控制系统(11),所述气动装置(9)与气囊(10)连接,气囊(10)的底部设有排水口穿出防水壳体(1);所述控制系统(11)分别与摄像头(2)、声呐(3)、气动装置(9)连接,所述防水壳体(1)的两侧设有左前足、左中足、左后足、右前足、右中足、右后足。2.根据权利要求1所述适用于水下潜行的六足机器人,其特征在于,所述控制系统(11)的型号为jmdm-32diomr。3.根据权利要求2所述适用于水下潜行的六足机器人,其特征在于,所述控制系统(11)的第一i/o接口与摄像头(2)连接,所述控制系统(11)的第二i/o接口与声呐(3)连接,所述控制系统(11)的第三i/o接口与气动装置(9)连接。4.根据权利要求1所述适用于水下潜行的六足机器人,其特征在于,所述左前足、左中足、左后足、右前足、右中足、右后足均包括:驱动电机(4)、螺旋桨(5)、小腿杆(6)、关节(7)、大腿杆(8)和舵机(12),所述大腿杆(8)的一端与舵机(12)连接,所述大腿杆(8)的另一端通过关节(7)与小腿杆(6)的一端连接,所述小腿杆(6)的另一端与螺旋桨(5)连接,所述螺旋桨(5)中设有驱动电机(4)。5.根据权利要求4所述适用于水下潜行的六足机器人,其特征在于,所述左前足的舵机与控制系统(11)的第四i/o接口连接,所述左中足的舵机与控制系统(11)的第五i/o接口连接,所述左后足的舵机与控制系统(11)的第六i/o接口连接,所述右前足的舵机与控制系统(11)的第七i/o接口连接,所述右中足的舵机与控制系统(11)的第八i/o接口连接,所述右后足的舵机与控制系统(11)的第九i/o接口连接。6.根据权利要求4所述适用于水下潜行的六足机器人,其特征在于,所述左前足的驱动电机与控制系统(11)的第十i/o接口连接,所述左中足的驱动电机与控制系统(11)的第十一i/o接口连接,所述左后足的驱动电机与控制系统(11)的第十二i/o接口连接,所述右前足的驱动电机与控制系统(11)的第十三i/o接口连接,所述右中足的驱动电机与控制系统(11)的第十四i/o接口连接,所述右后足的驱动电机与控制系统(11)的第十五i/o接口连接。7.根据权利要求4所述适用于水下潜行的六足机器人,其特征在于,所述小腿杆(6)和大腿杆(8)上均设有小孔。
技术总结
本实用新型公开了一种适用于水下潜行的六足机器人,涉及六足机器人技术领域。该六足机器人包括:防水壳体、摄像头、声呐、左前足、左中足、左后足、右前足、右中足、右后足、气动装置、气囊、控制系统,所述防水壳体的内部设有摄像头、声呐、气动装置、气囊、控制系统,所述气动装置与气囊连接,气囊的底部设有排水口穿出防水壳体;所述控制系统分别与摄像头、声呐、气动装置连接,所述防水壳体的两侧设有左前足、左中足、左后足、右前足、右中足、右后足。该六足机器人通过气囊调整六足机器人在水中潜行的深度,通过左前足、左中足、左后足、右前足、右中足、右后足来调整六足机器人在水中的潜行方向。向。向。
技术研发人员:宋岩 吕文超 周亮亮
受保护的技术使用者:江苏航运职业技术学院
技术研发日:2021.11.12
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。